
自动驾驶系统的控制装置和该装置的控制方法.pdf

一吃****书竹

1/7
2/7

3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
自动驾驶系统的控制装置和该装置的控制方法.pdf
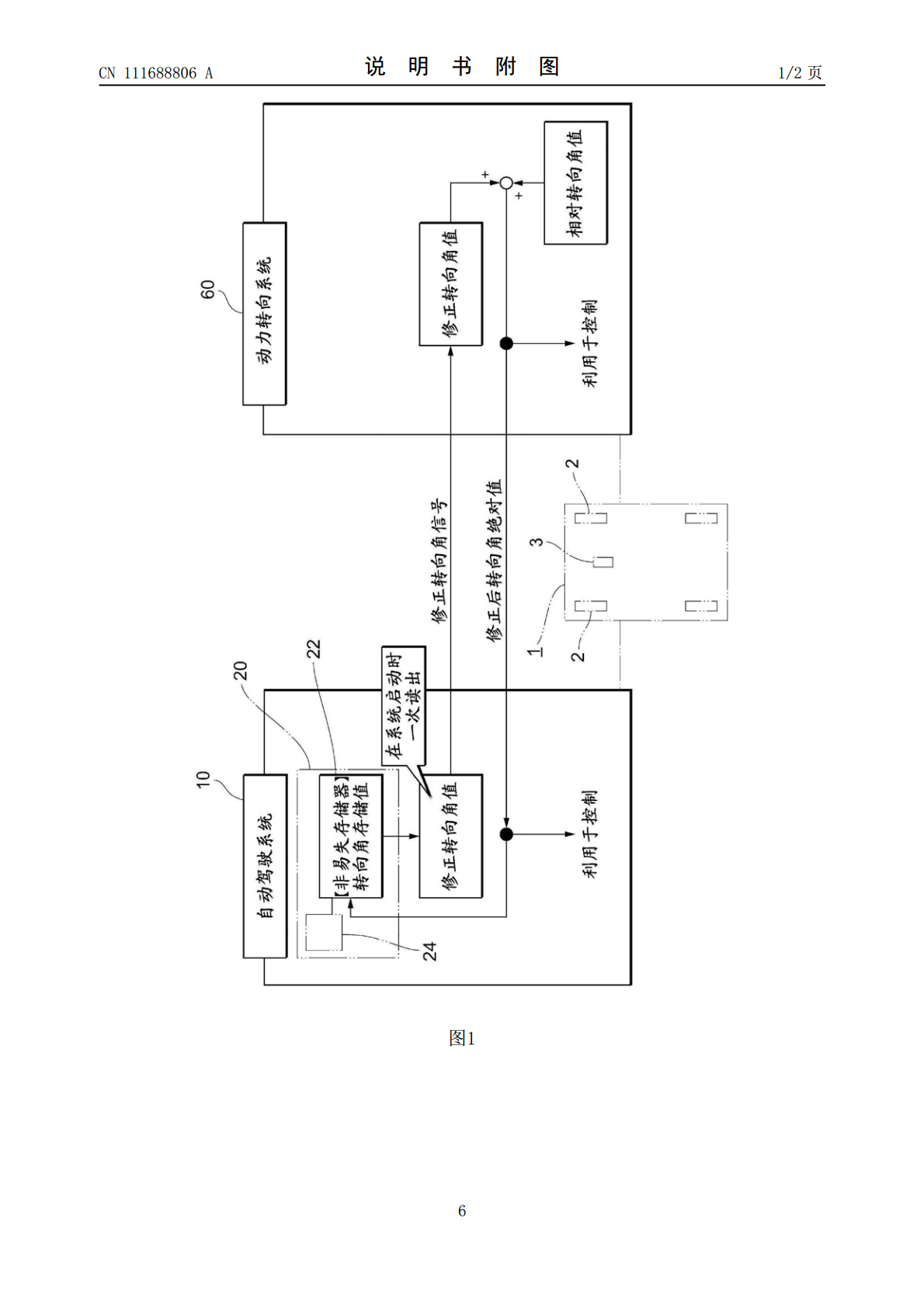
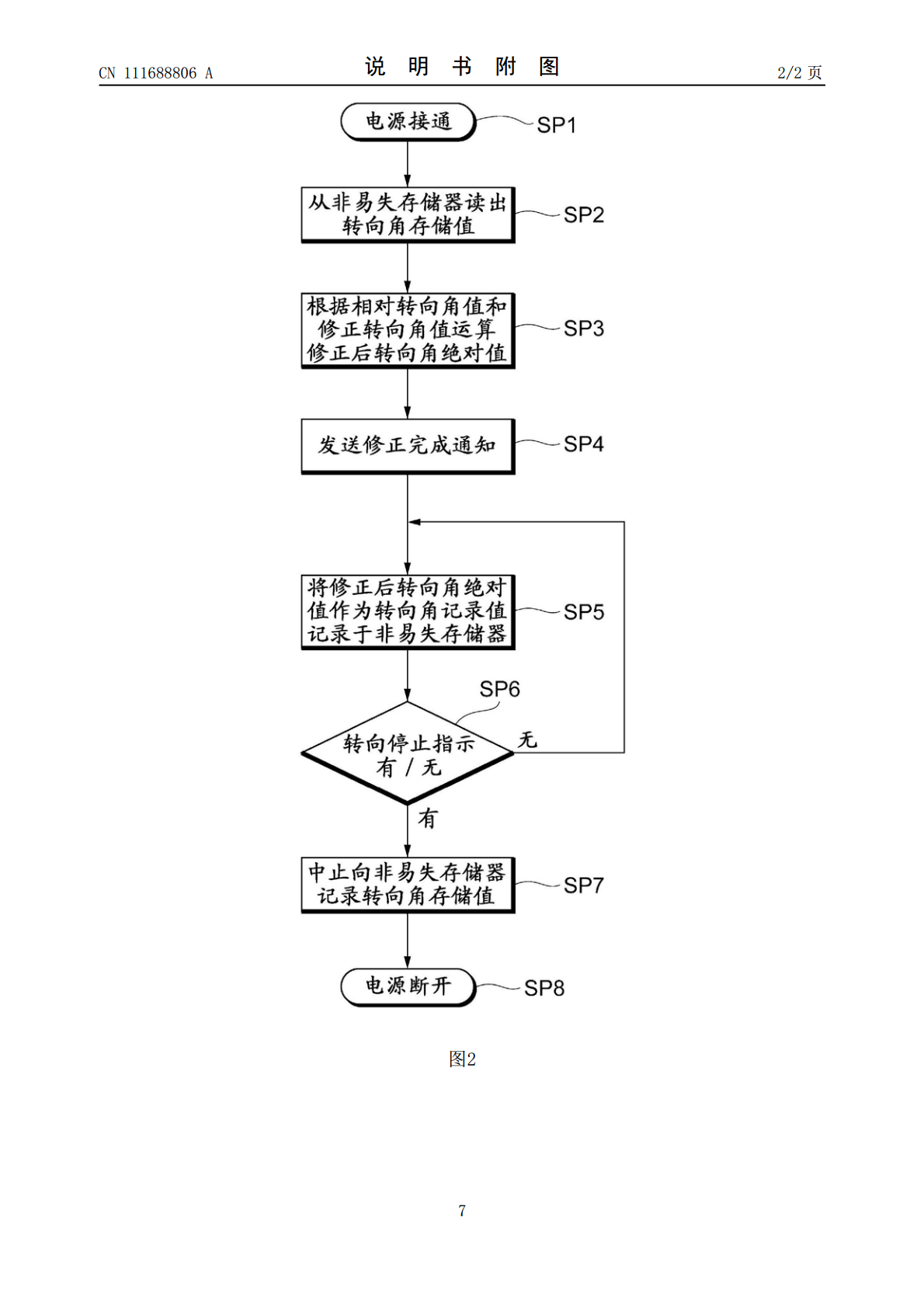
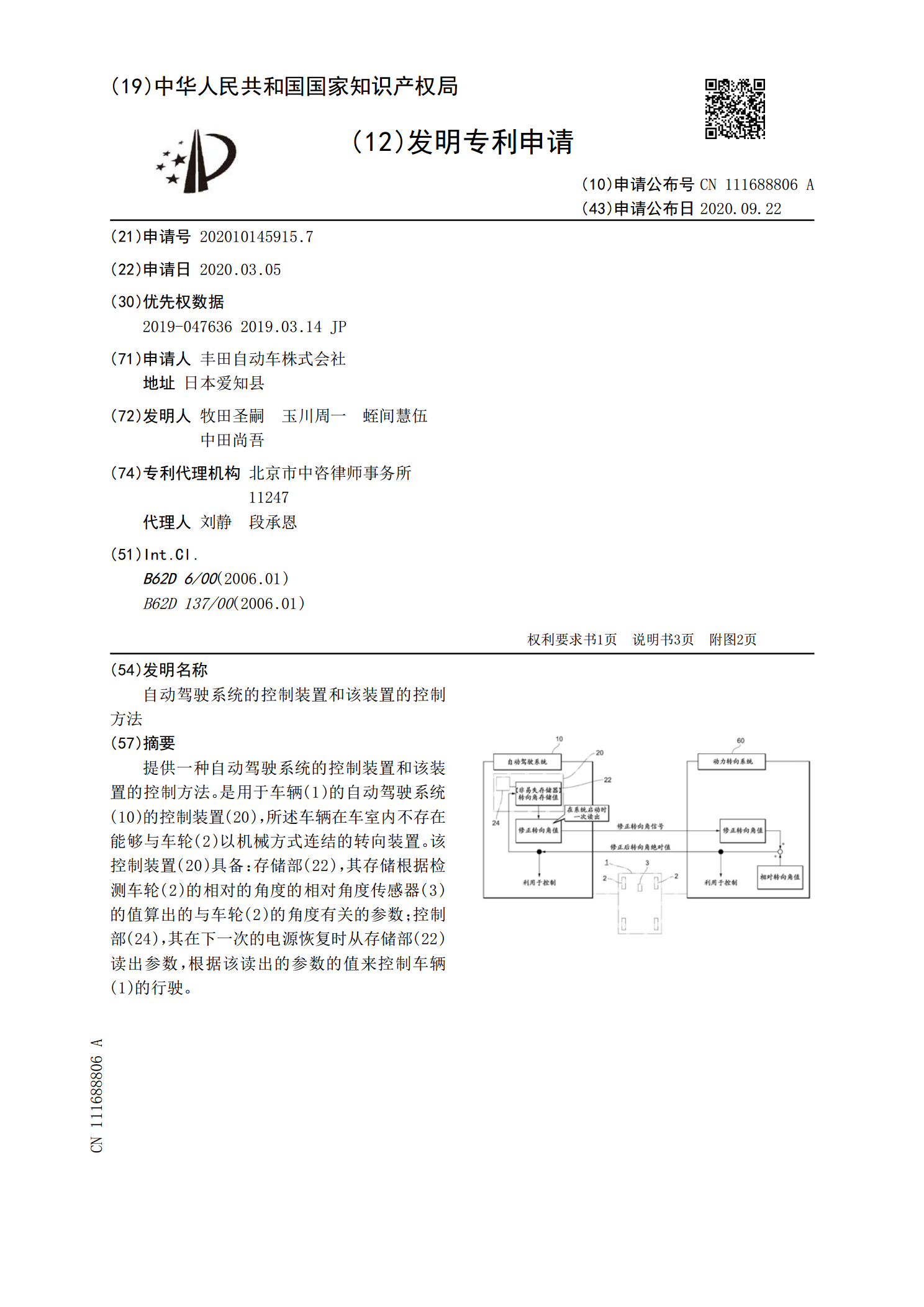
提供一种自动驾驶系统的控制装置和该装置的控制方法。是用于车辆(1)的自动驾驶系统(10)的控制装置(20),所述车辆在车室内不存在能够与车轮(2)以机械方式连结的转向装置。该控制装置(20)具备:存储部(22),其存储根据检测车轮(2)的相对的角度的相对角度传感器(3)的值算出的与车轮(2)的角度有关的参数;控制部(24),其在下一次的电源恢复时从存储部(22)读出参数,根据该读出的参数的值来控制车辆(1)的行驶。

除湿装置、用于控制该除湿装置的控制系统及控制方法.pdf
本发明提出一种除湿装置及用于控制该除湿装置的控制系统,所述除湿装置具有用于从干燥空气中去除和吸收湿气的第一液体循环回路,所述第一液体循环回路具有吸湿液体,其中除湿装置包括第一接触空间、第二接触空间,还包括第一叶轮、第二叶轮用于使所述吸湿液体对于所述干燥空气的接触面的表面积增大,所述除湿装置具有交替工作模式,相对于利用冷媒的冷凝干燥的方法,可连续进行去湿且需要时对吸湿液体进行再解吸,有利于降低成本。
控制车辆自动驾驶的方法和装置.pdf
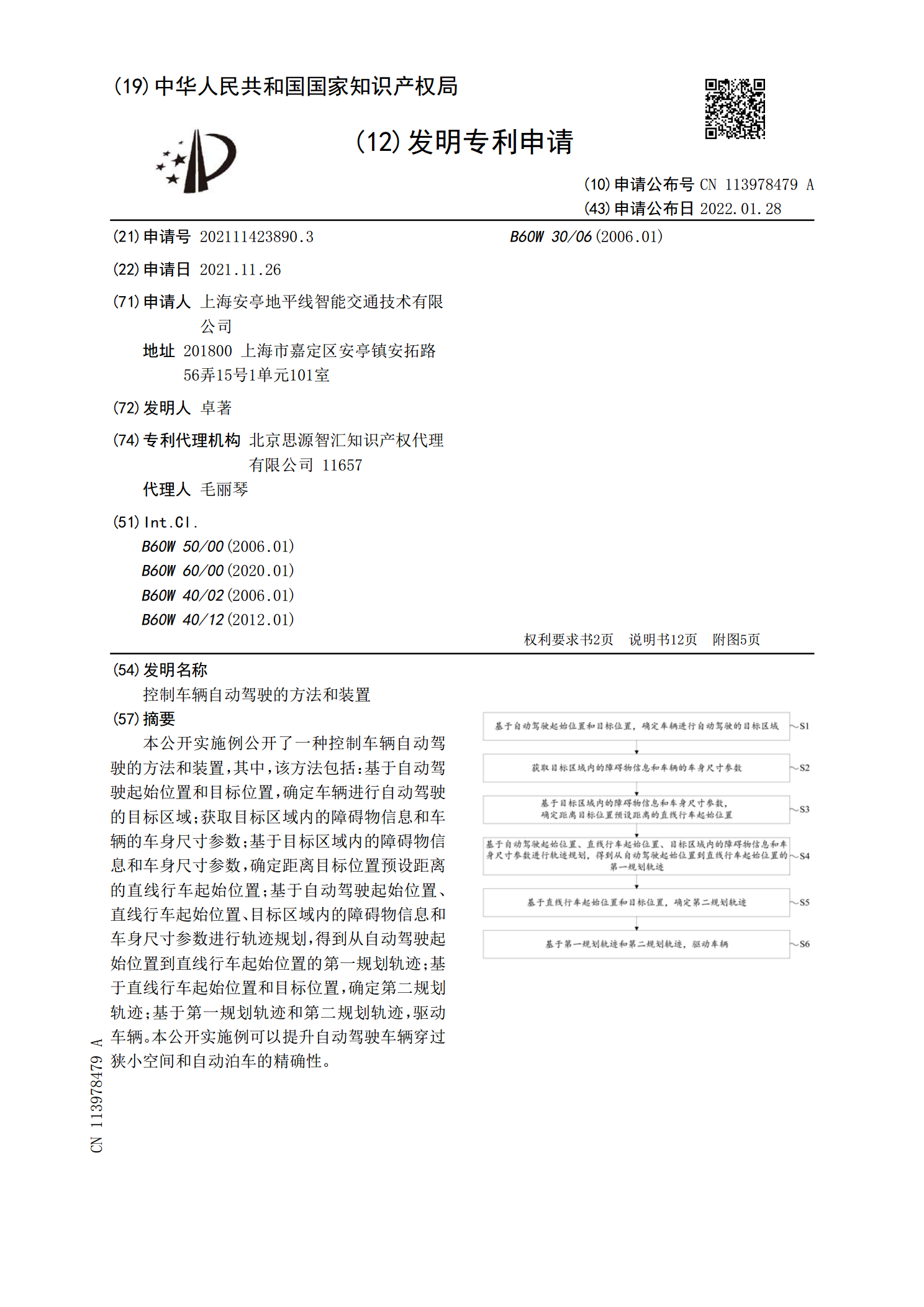
本公开实施例公开了一种控制车辆自动驾驶的方法和装置,其中,该方法包括:基于自动驾驶起始位置和目标位置,确定车辆进行自动驾驶的目标区域;获取目标区域内的障碍物信息和车辆的车身尺寸参数;基于目标区域内的障碍物信息和车身尺寸参数,确定距离目标位置预设距离的直线行车起始位置;基于自动驾驶起始位置、直线行车起始位置、目标区域内的障碍物信息和车身尺寸参数进行轨迹规划,得到从自动驾驶起始位置到直线行车起始位置的第一规划轨迹;基于直线行车起始位置和目标位置,确定第二规划轨迹;基于第一规划轨迹和第二规划轨迹,驱动车辆。本公
车辆行驶控制装置和自动驾驶控制方法.pdf
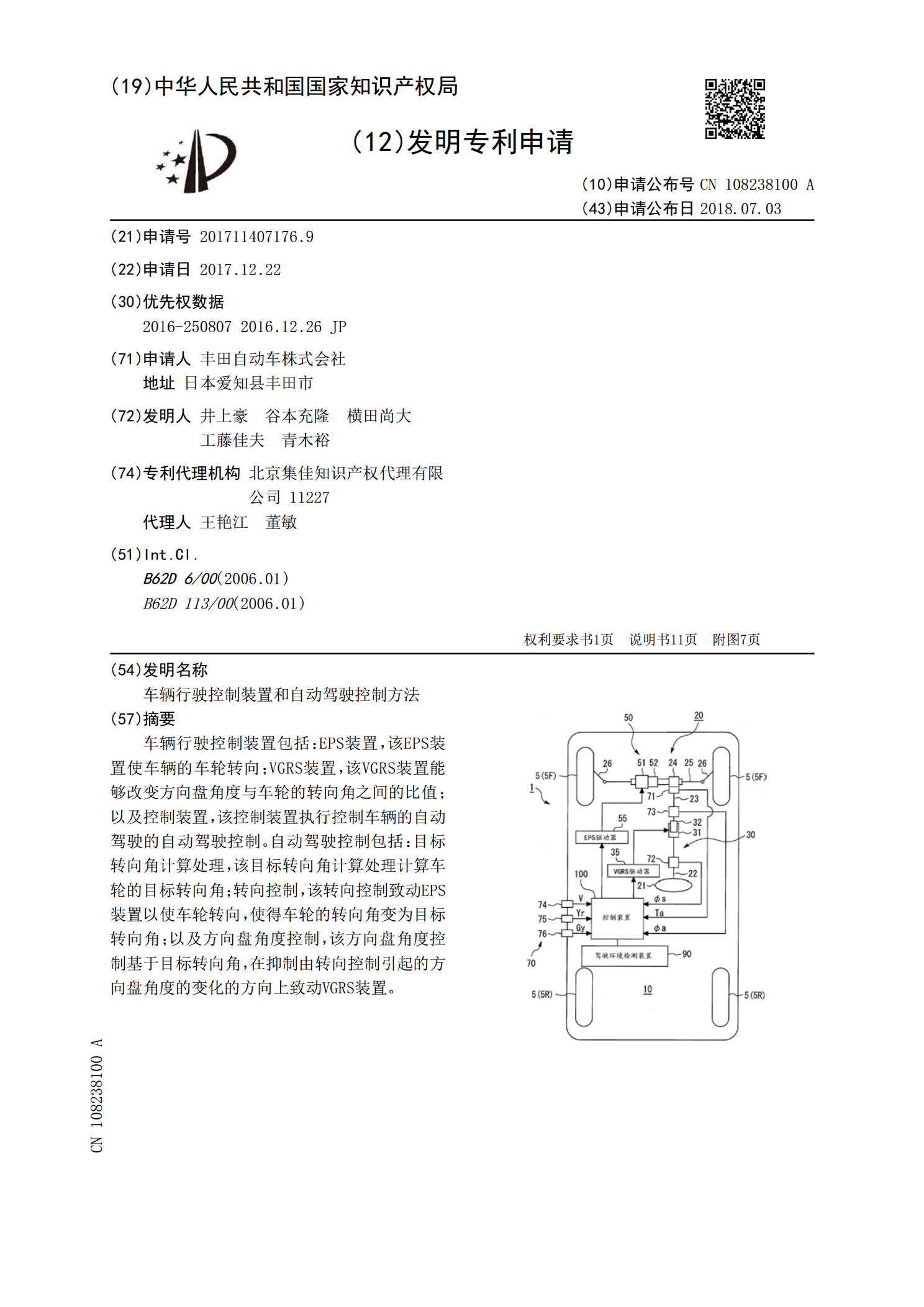
车辆行驶控制装置包括:EPS装置,该EPS装置使车辆的车轮转向;VGRS装置,该VGRS装置能够改变方向盘角度与车轮的转向角之间的比值;以及控制装置,该控制装置执行控制车辆的自动驾驶的自动驾驶控制。自动驾驶控制包括:目标转向角计算处理,该目标转向角计算处理计算车轮的目标转向角;转向控制,该转向控制致动EPS装置以使车轮转向,使得车轮的转向角变为目标转向角;以及方向盘角度控制,该方向盘角度控制基于目标转向角,在抑制由转向控制引起的方向盘角度的变化的方向上致动VGRS装置。

转向控制装置、转向控制方法和包括该转向控制装置的转向支持系统.pdf
公开了一种转向控制装置、转向控制方法和包括转向控制装置的转向支持系统。特别地,根据本公开的转向控制装置包括:命令值计算单元,用于基于与方向盘的旋转对应的转向信息来计算命令齿条的移动的齿条移动命令值;差值计算单元,用于通过在感测到齿条的移动时接收与齿条的移动对应的齿条移动感测值来计算齿条移动命令值和齿条移动感测值之间的差值;以及反应扭矩计算单元,用于基于差值和一个或多个预设的虚拟连杆参数来计算反应扭矩。