
清扫车及其防侧倾控制方法、装置和存储介质.pdf

一只****ua

1/10
2/10
3/10
4/10

5/10
6/10
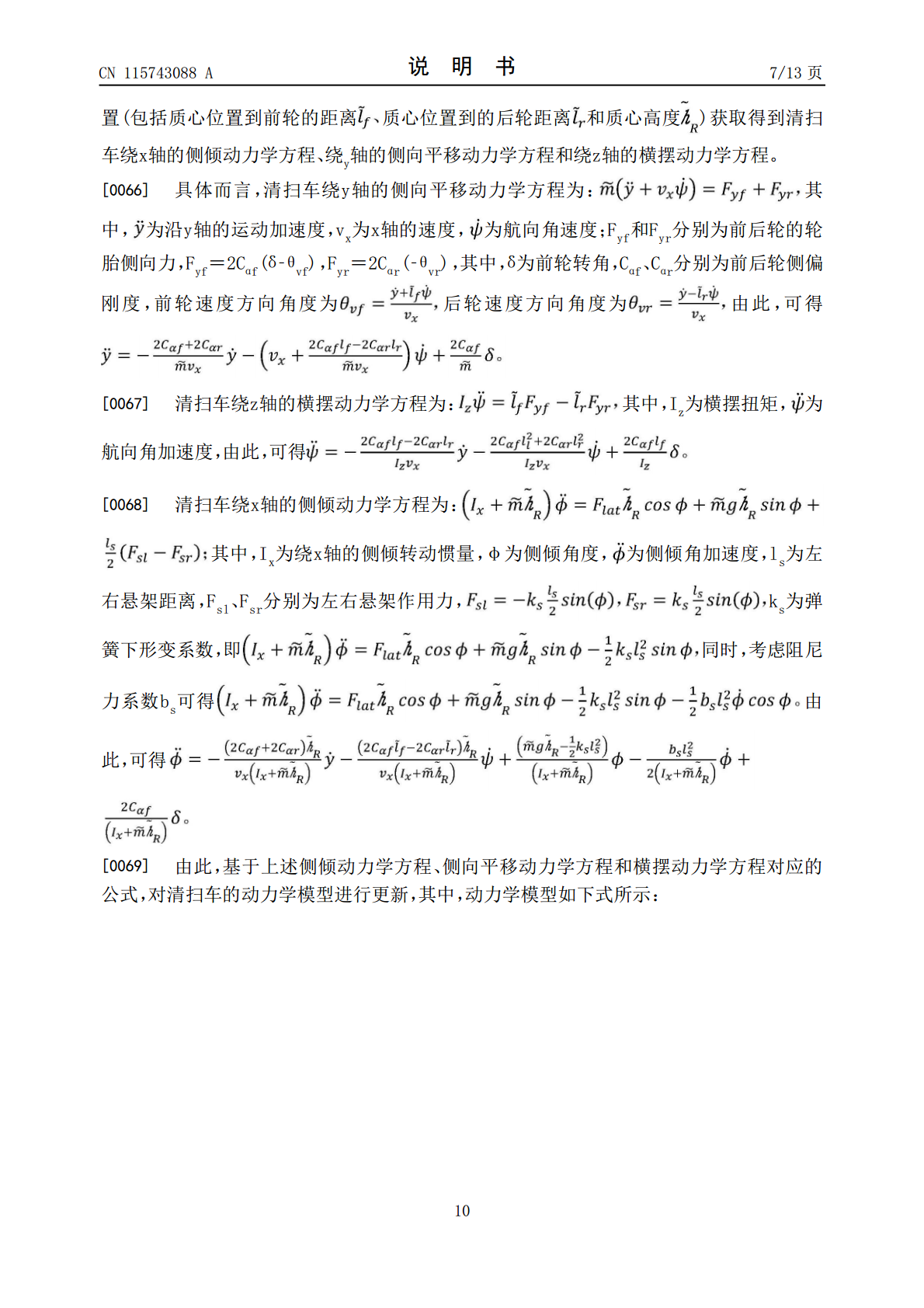
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
清扫车及其防侧倾控制方法、装置和存储介质.pdf
本发明公开了一种清扫车及其防侧倾控制方法、装置和存储介质,其中,清扫车包括水箱,方法包括:获取水箱当前液位,并根据水箱当前液位获取清扫车的当前整车质量和当前质心位置;根据当前整车质量和当前质心位置更新清扫车的动力学模型,并根据更新后的动力学模型构建清扫车的防侧倾预测模型;根据防侧倾预测模型获取方向盘目标转角,并根据方向盘目标转角对清扫车进行防侧倾控制。由此,通过考虑清扫作业过程中的水箱液位变化,动态辨识清扫车的当前整车质量和当前质心位置,并实时更新清扫车的动力学模型和防侧倾预测模型,从而,提高防侧倾控制精
基于MPC算法的防侧倾控制方法、设备及存储介质.pdf
本发明公开了一种基于MPC算法的防侧倾控制方法、设备及计算机可读存储介质,所述方法为:根据通过进行动力学分析建立的三自由度线性动力学模型,和根据三自由度模型对侧倾中心取力矩平衡得到的LTR特定模型,整理得到状态空间形式,将其通过离散化处理后得到MPC算法的预测离散模型;通过预测离散模型对未来预测时域输出的扭矩矢量进行预测得到扭矩矢量预测输出,以预设的输出响应状态作为参考值,对扭矩矢量预测输出和参考值进行比较,得到优化目标函数;对优化目标函数求解最优左右侧车轮主动防侧翻力矩,根据LTR的大小判断需要采取介入
装置及其控制方法和存储介质.pdf
本公开提供一种装置及其控制方法和存储介质。所述装置包括用于对每个像素组的曝光时间或增益进行设置的传感器,所述像素组包括至少一个像素,所述装置包括:包括传感器的摄像单元,其被构造为通过光学系统拍摄被摄体以生成图像;获取单元,其被构造为获取与生成的图像中的特定图像区域有关的信息;确定单元,其被构造为基于与特定图像区域有关的信息确定特定像素区域,所述特定像素区域包括传感器中的至少一个像素组并且与特定图像区域相对应;改变单元,其被构造为改变由确定单元所确定的特定像素区域中的像素组的数量、大小和形状中的至少一个;以
口罩及其防高温保护控制方法、装置和存储介质.pdf
本发明公开了一种口罩及其防高温保护控制方法、装置和存储介质。其中,控制方法包括:在口罩以制冷模式运行时,检测半导体模块的热端温度;根据半导体模块的热端温度确定口罩进入防高温保护状态时,根据半导体模块的热端温度对送风模块进行控制。本发明的口罩的防高温保护控制方法可实现口罩的防高温保护自动控制,并可对半导体模块的热端进行散热,从而可避免半导体模块因热端散热不畅而产生故障或制冷效果变差的问题,提升了用户体验。
烹饪装置及其控制方法、控制装置和可读存储介质.pdf
本发明提出了一种烹饪装置及其控制方法、控制装置和可读存储介质。其中,烹饪装置的控制方法包括:检测烹饪装置处于N个烹饪阶段中的当前烹饪阶段,N为大于1的整数;根据烹饪装置所处的当前烹饪阶段,通过提示装置输出与当前烹饪阶段对应的提示信息;其中,当前烹饪阶段为N个烹饪阶段中的任一个烹饪阶段。由于多个烹饪阶段中的任一个烹饪阶段均对应设置有相应的提示信息,确定当前烹饪阶段对应的提示信息后,通过提示装置输出该提示信息,避免用户在没有时间维度的情况下产生迷惑和不解,通过逻辑判断阶段呈现在用户面前,可以帮助用户了解烹饪进