
一种工业抓取机械设备.pdf

雨巷****彦峰

1/7
2/7

3/7
4/7
5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种工业抓取机械设备.pdf
本发明公开了一种工业抓取机械设备,包括固定杆,固定杆的一侧设置有第一机械臂,第一机械臂的内部设置有第一连接杆,第一机械臂的一侧设置有第一连接软管,第一连接软管的一侧设置有第二机械臂,第二机械臂的内部设置有第二连接杆,第二机械臂的一侧设置有第二连接软管,第二连接软管的一侧设置有第三机械臂,第三机械臂的内部设置有第三连接杆,第三机械臂的底部设置有万向轮,万向轮的底部设置有驱动机外壳,驱动机外壳的内部设置有通电线圈,通电线圈的一侧设置有液压缸,液压缸的一侧设置有伸缩弹簧,驱动机外壳的底部设置有驱动机盖,驱动机盖
一种工业用抓取装置.pdf
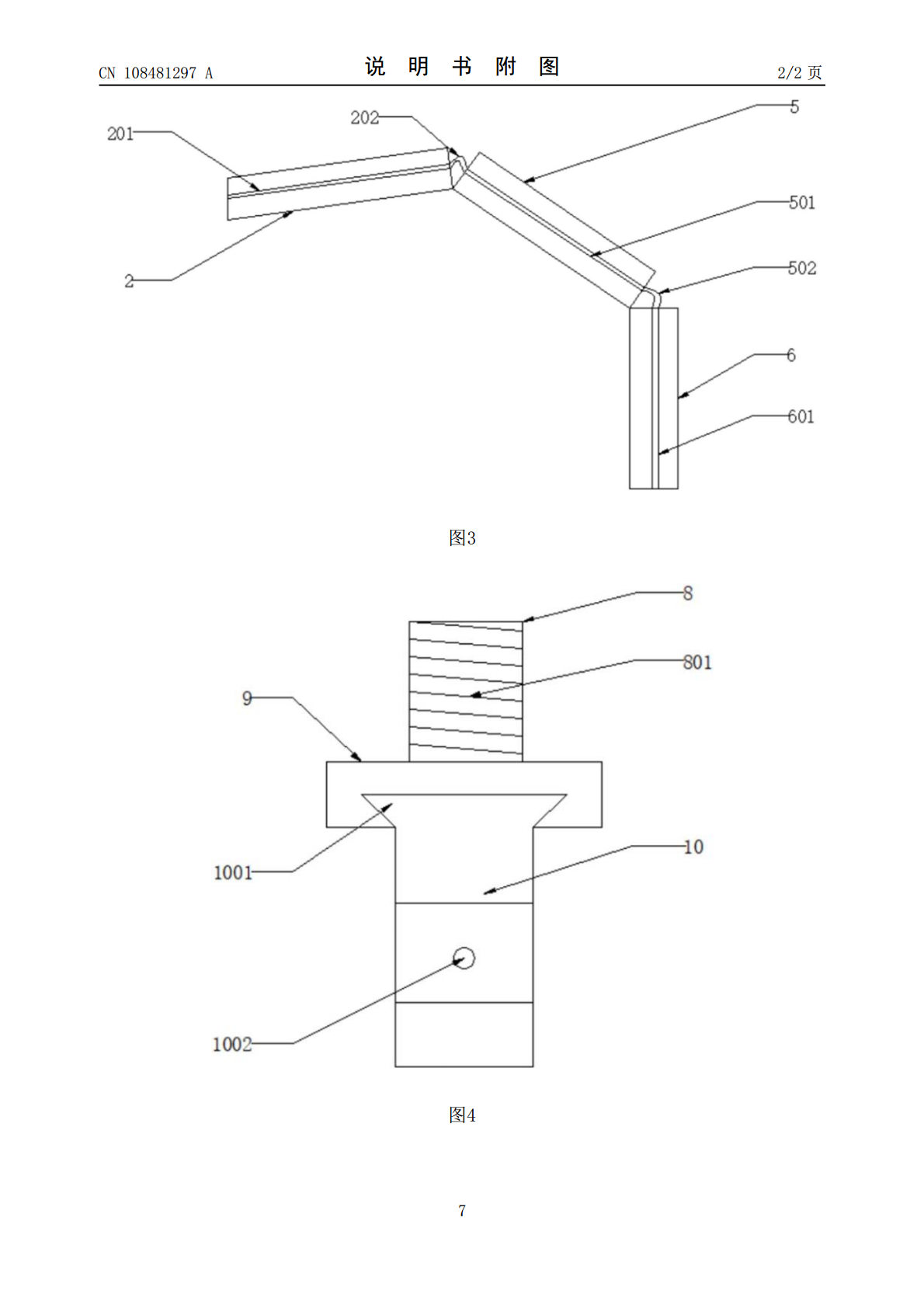
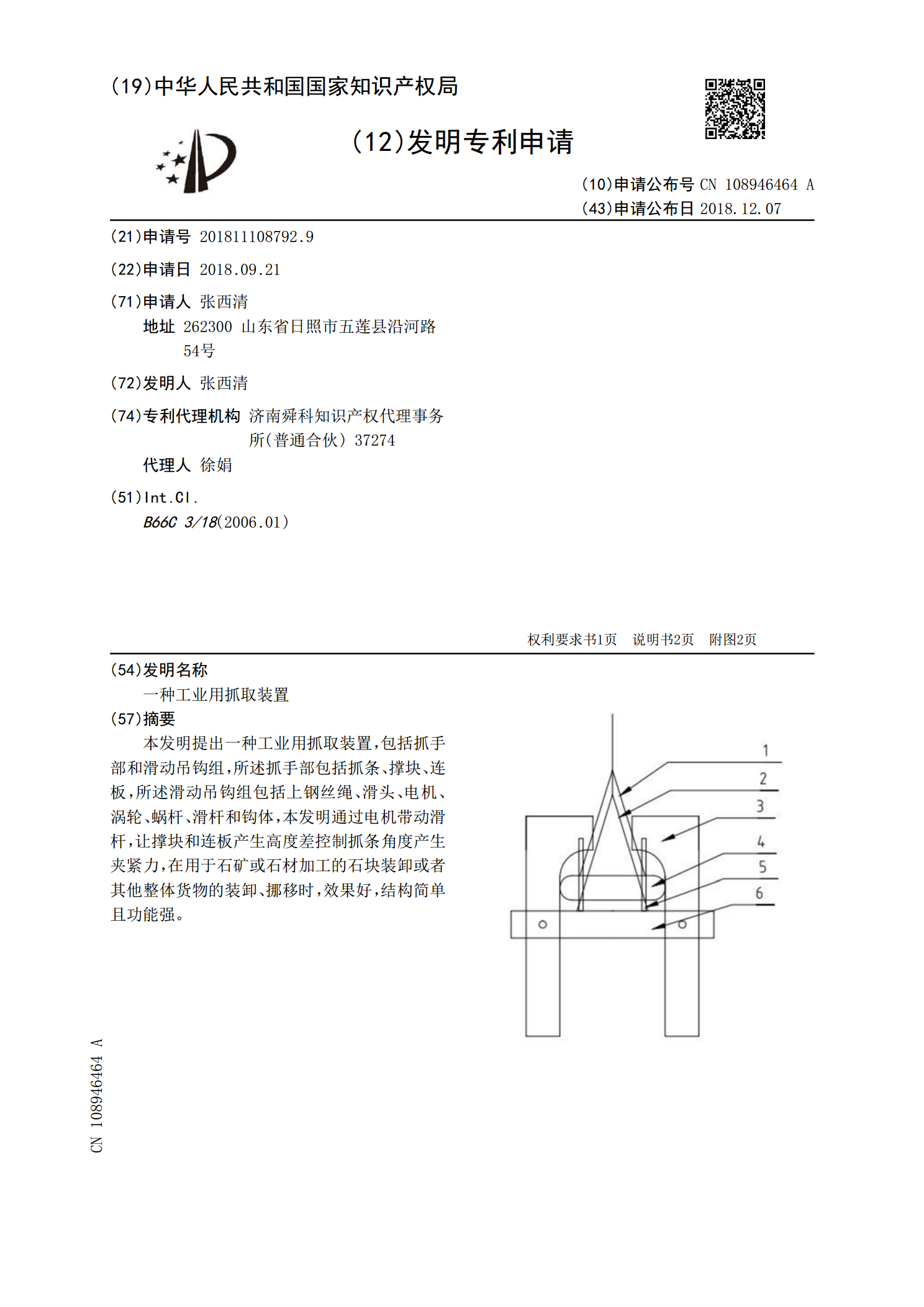
本发明提出一种工业用抓取装置,包括抓手部和滑动吊钩组,所述抓手部包括抓条、撑块、连板,所述滑动吊钩组包括上钢丝绳、滑头、电机、涡轮、蜗杆、滑杆和钩体,本发明通过电机带动滑杆,让撑块和连板产生高度差控制抓条角度产生夹紧力,在用于石矿或石材加工的石块装卸或者其他整体货物的装卸、挪移时,效果好,结构简单且功能强。
一种抓取机械设备的夹具结构.pdf
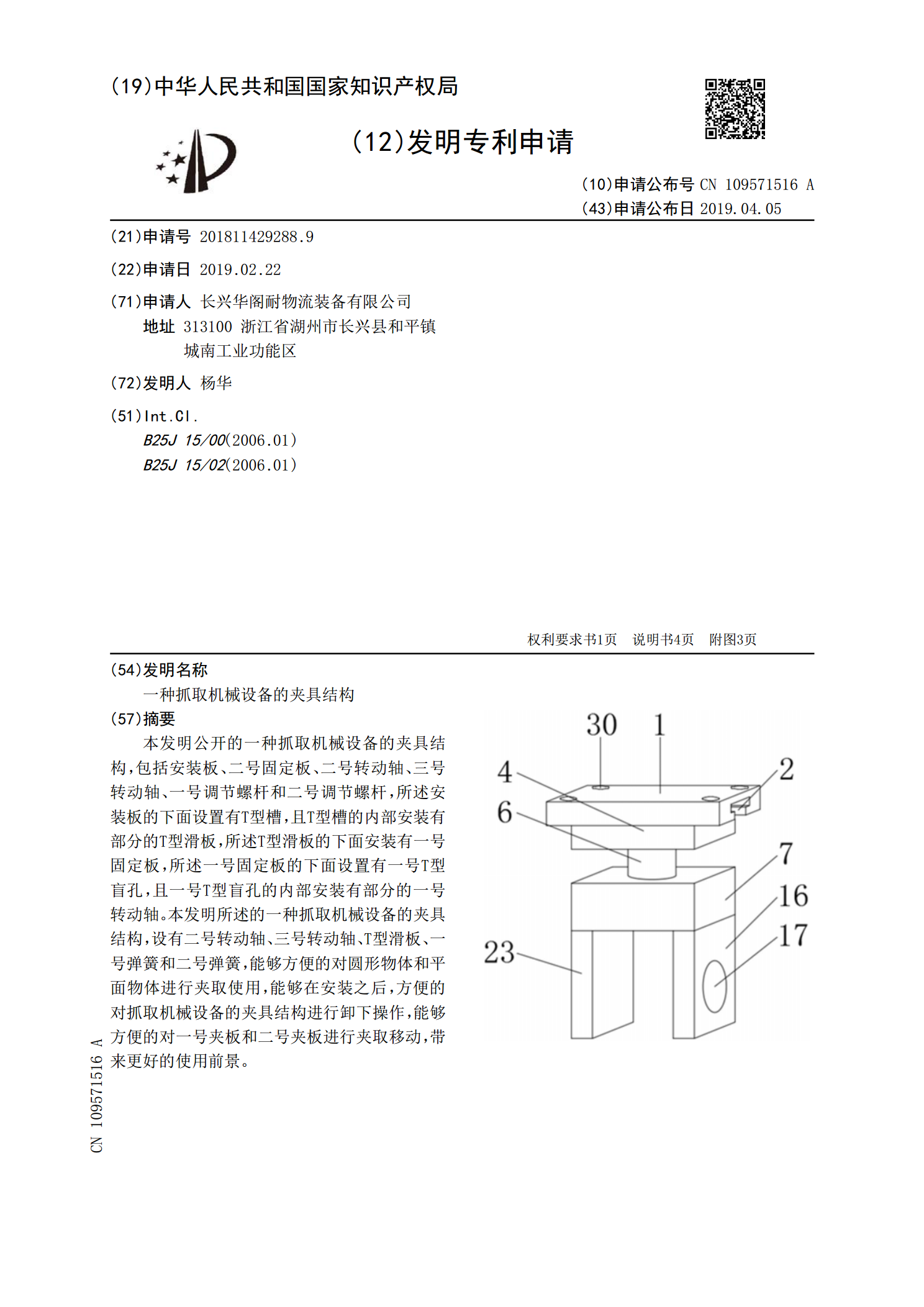
本发明公开的一种抓取机械设备的夹具结构,包括安装板、二号固定板、二号转动轴、三号转动轴、一号调节螺杆和二号调节螺杆,所述安装板的下面设置有T型槽,且T型槽的内部安装有部分的T型滑板,所述T型滑板的下面安装有一号固定板,所述一号固定板的下面设置有一号T型盲孔,且一号T型盲孔的内部安装有部分的一号转动轴。本发明所述的一种抓取机械设备的夹具结构,设有二号转动轴、三号转动轴、T型滑板、一号弹簧和二号弹簧,能够方便的对圆形物体和平面物体进行夹取使用,能够在安装之后,方便的对抓取机械设备的夹具结构进行卸下操作,能够方
一种用于工业机器人的货物抓取装置及抓取系统.pdf
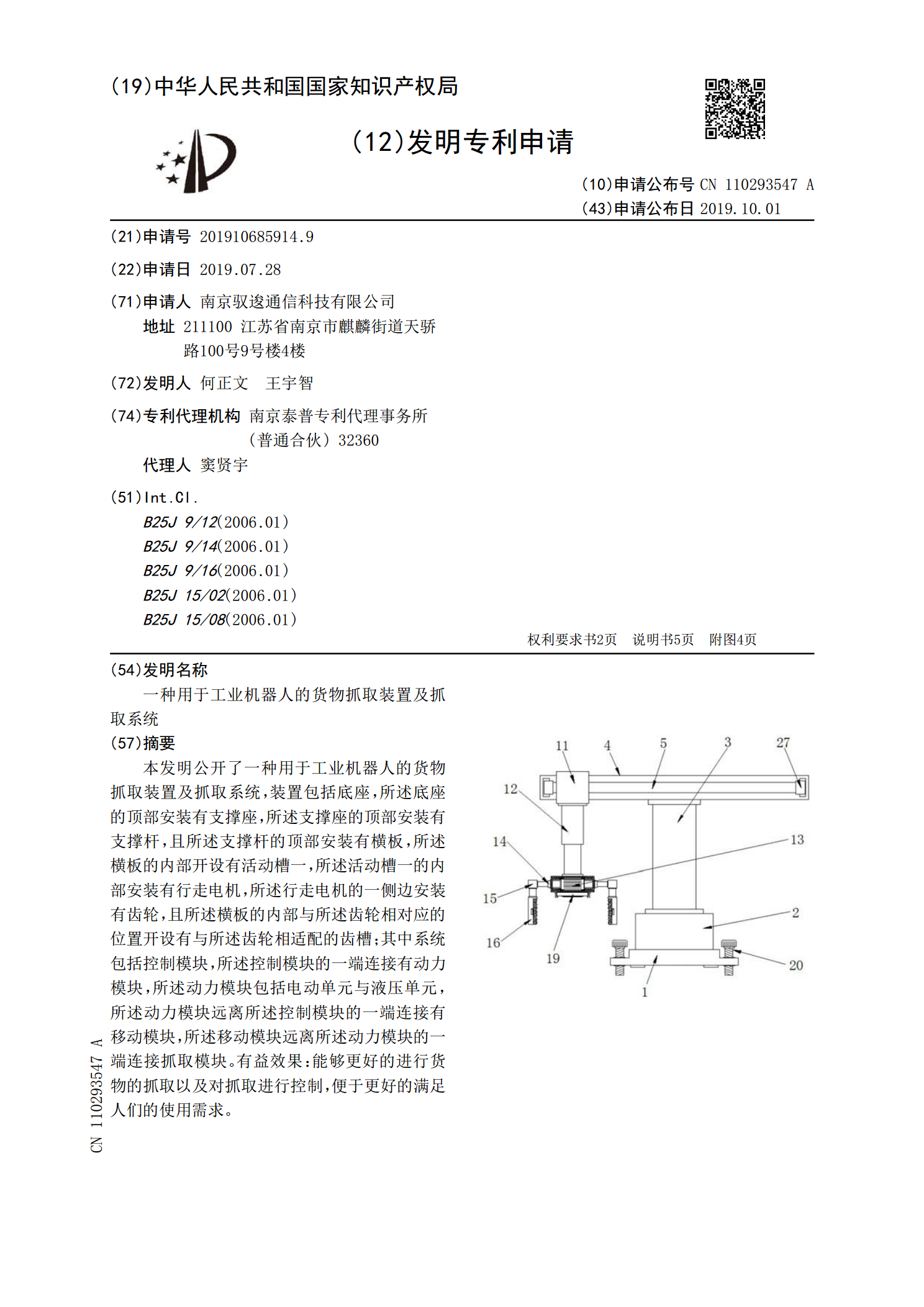
本发明公开了一种用于工业机器人的货物抓取装置及抓取系统,装置包括底座,所述底座的顶部安装有支撑座,所述支撑座的顶部安装有支撑杆,且所述支撑杆的顶部安装有横板,所述横板的内部开设有活动槽一,所述活动槽一的内部安装有行走电机,所述行走电机的一侧边安装有齿轮,且所述横板的内部与所述齿轮相对应的位置开设有与所述齿轮相适配的齿槽;其中系统包括控制模块,所述控制模块的一端连接有动力模块,所述动力模块包括电动单元与液压单元,所述动力模块远离所述控制模块的一端连接有移动模块,所述移动模块远离所述动力模块的一端连接抓取模块
一种工业抓取机械手.pdf
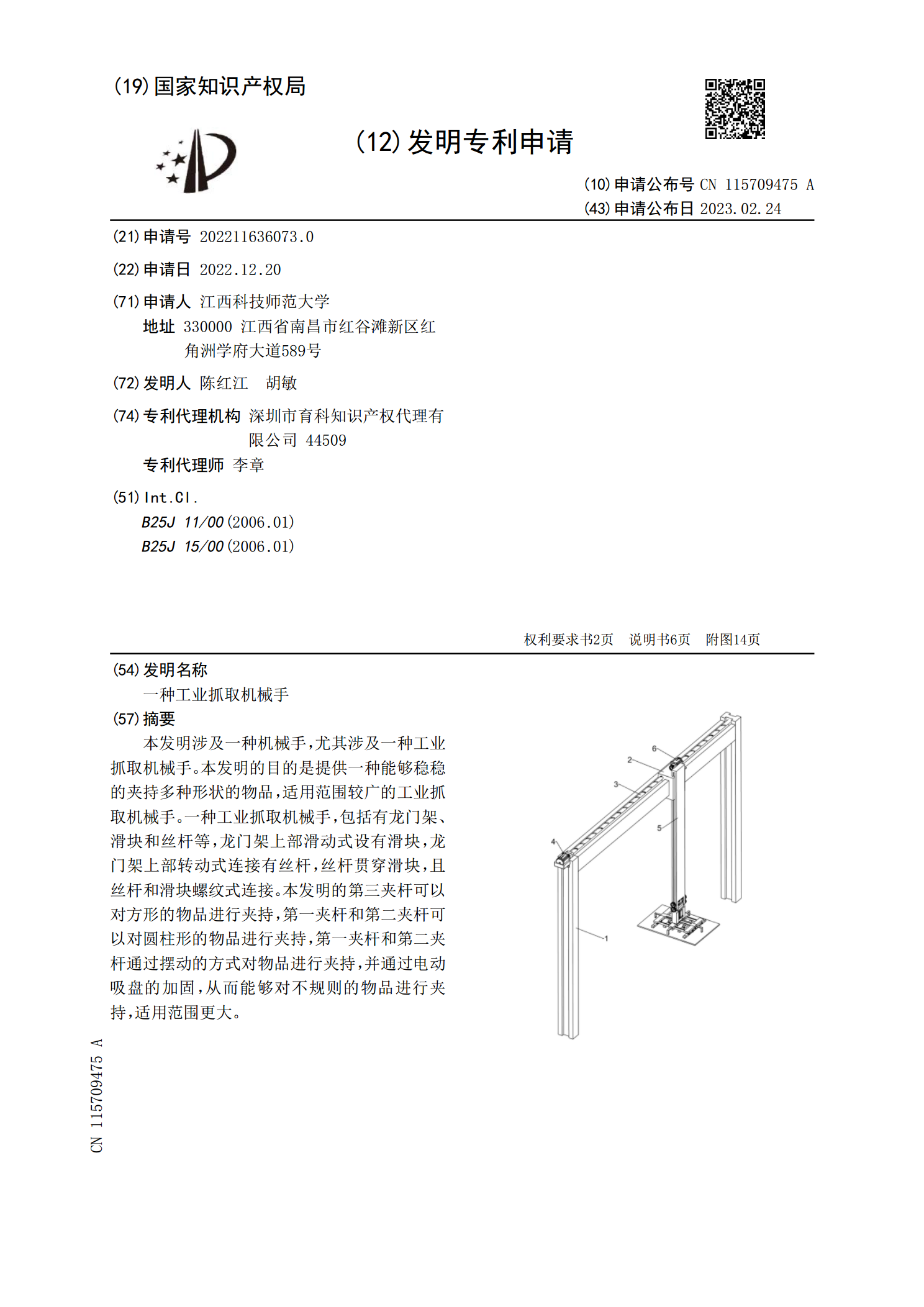
本发明涉及一种机械手,尤其涉及一种工业抓取机械手。本发明的目的是提供一种能够稳稳的夹持多种形状的物品,适用范围较广的工业抓取机械手。一种工业抓取机械手,包括有龙门架、滑块和丝杆等,龙门架上部滑动式设有滑块,龙门架上部转动式连接有丝杆,丝杆贯穿滑块,且丝杆和滑块螺纹式连接。本发明的第三夹杆可以对方形的物品进行夹持,第一夹杆和第二夹杆可以对圆柱形的物品进行夹持,第一夹杆和第二夹杆通过摆动的方式对物品进行夹持,并通过电动吸盘的加固,从而能够对不规则的物品进行夹持,适用范围更大。