
一种智能物料搬运的自动导引车及其搬运方法.pdf

努力****星驰


1/10

2/10

3/10

4/10
5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种智能物料搬运的自动导引车及其搬运方法.pdf
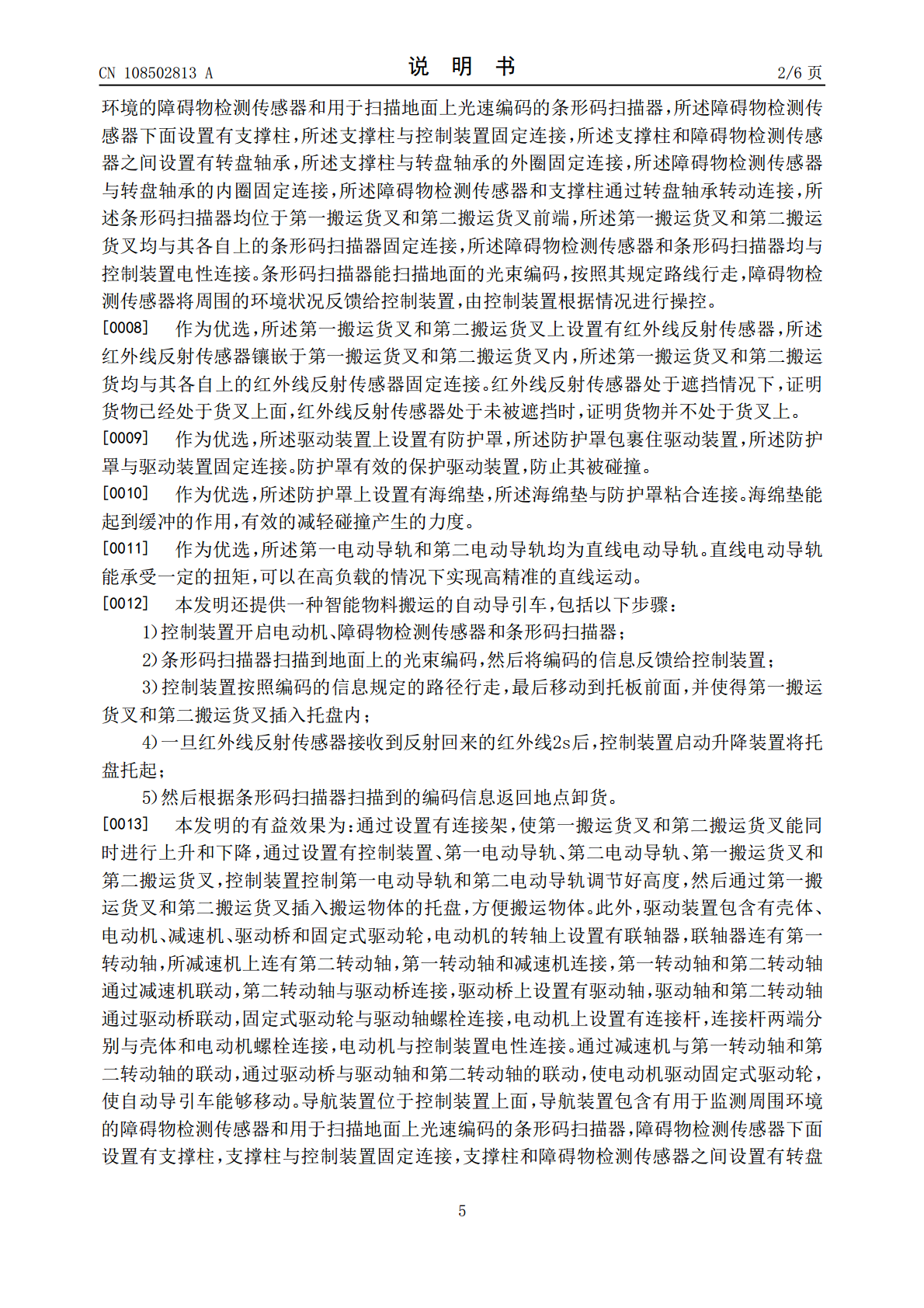
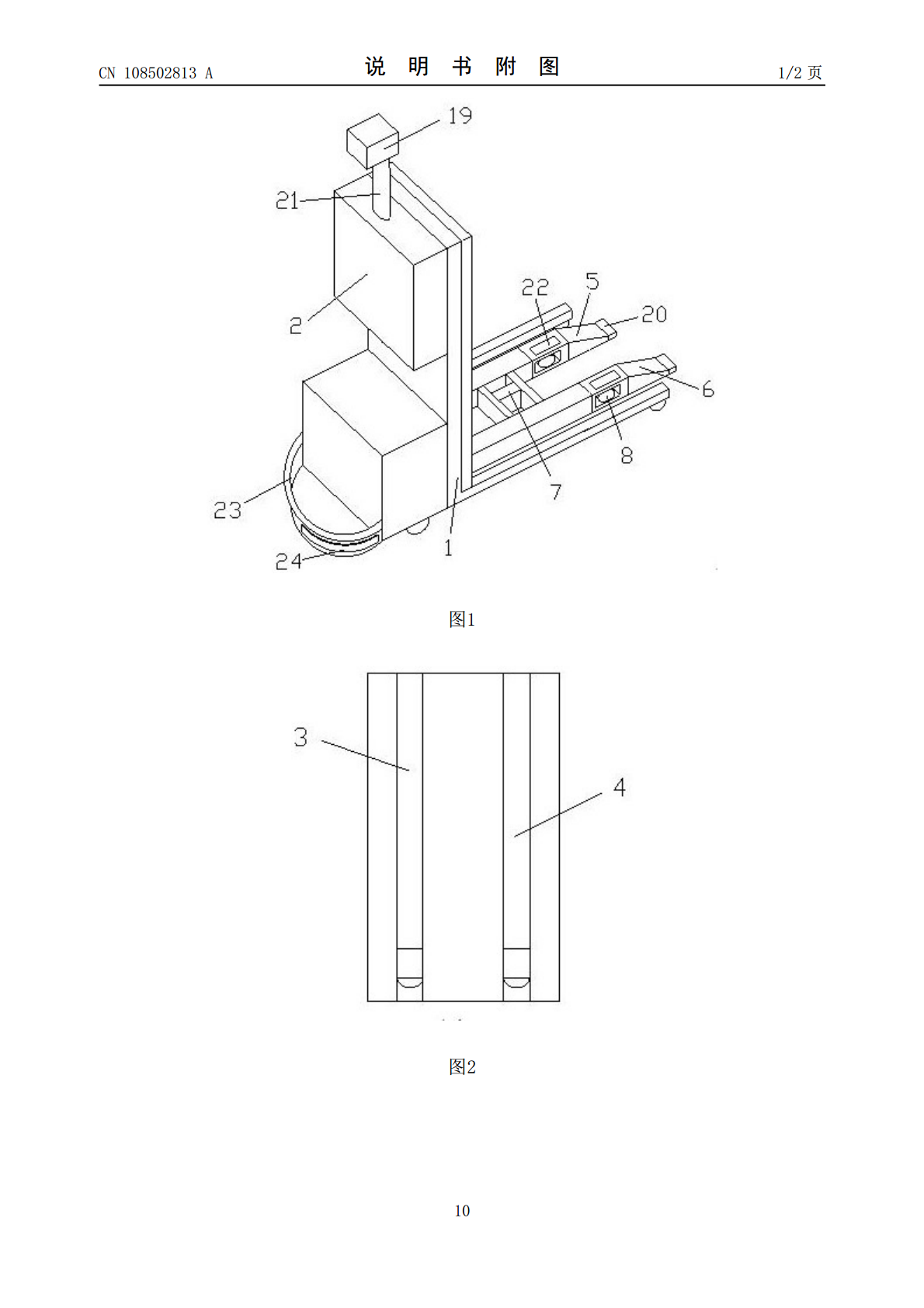
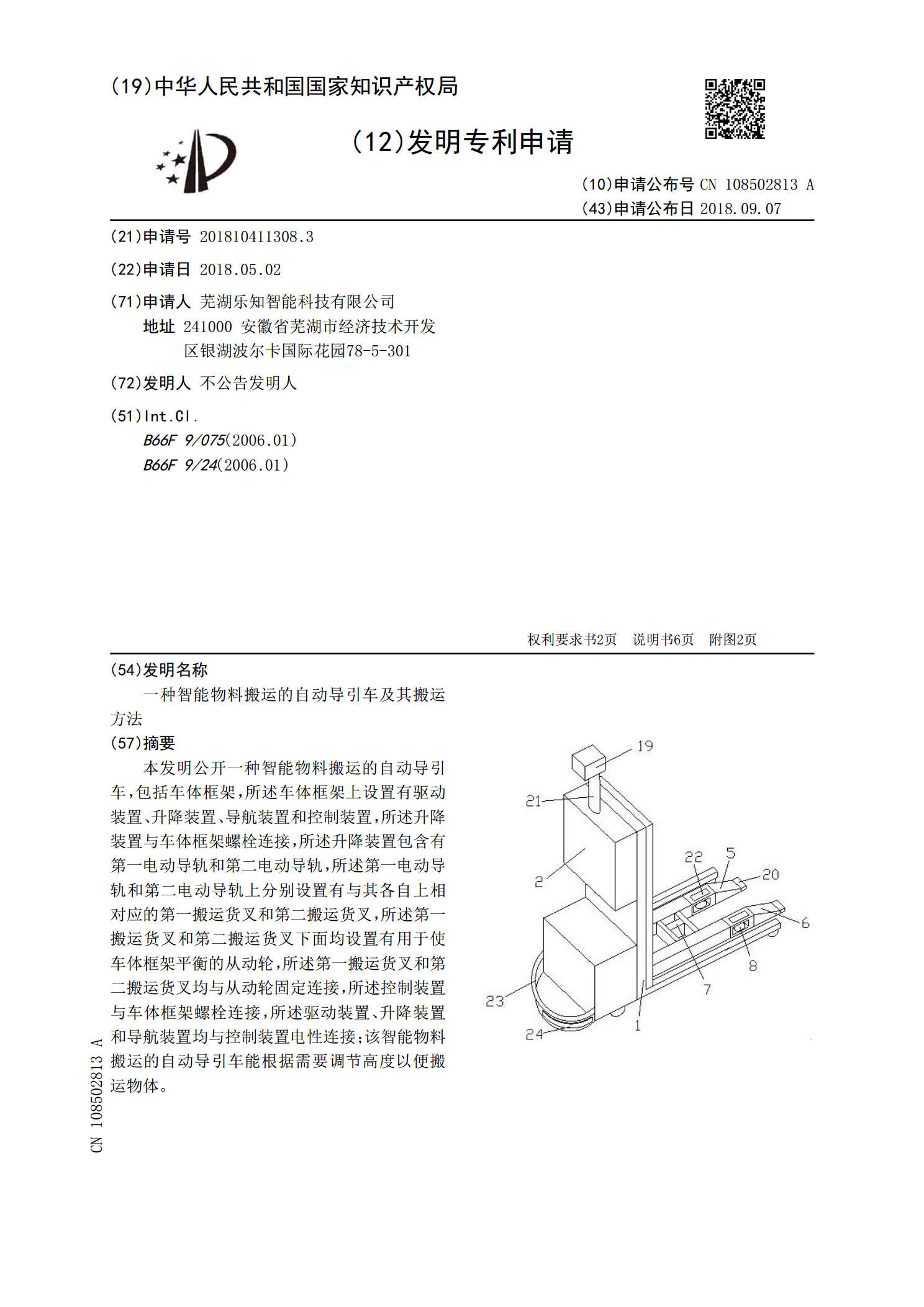
本发明公开一种智能物料搬运的自动导引车,包括车体框架,所述车体框架上设置有驱动装置、升降装置、导航装置和控制装置,所述升降装置与车体框架螺栓连接,所述升降装置包含有第一电动导轨和第二电动导轨,所述第一电动导轨和第二电动导轨上分别设置有与其各自上相对应的第一搬运货叉和第二搬运货叉,所述第一搬运货叉和第二搬运货叉下面均设置有用于使车体框架平衡的从动轮,所述第一搬运货叉和第二搬运货叉均与从动轮固定连接,所述控制装置与车体框架螺栓连接,所述驱动装置、升降装置和导航装置均与控制装置电性连接;该智能物料搬运的自动导引

自动驻车物料车、自动物料搬运系统及其搬运方法.pdf
本发明揭示了自动驻车物料车、自动物料搬运系统及其搬运方法,其中自动驻车物料车包括车架,所述车架的底部设置有一组轮,所述车架上还设置有至少两个驻车立杆,常态下,所述驻车立杆的底面在自身重力作用下与轮所在的支撑面接触。本方案设计精巧,结构简单,通过设置一组驻车立杆,使它们常态下与轮所在的支撑面进行接触来增加物料车与支撑面的摩擦力,从而增加物料车由静止到运动所需要的动力的大小,增加物料车的启动难度,进而解决单独的万向轮结构易受外力产生自由移动的问题,有利于避免物料车出现移位,为与自动化搬运设备的结合使用奠定了基

一种自动导引运输车无人搬运系统及无人搬运方法.pdf
本发明公开了一种自动导引运输车无人搬运系统及无人搬运方法,所述系统包括自动导引运输车及物料传输平台,所述自动导引运输车包括壳体,主控电路板及电池管理单元,所述主控电路板上设置有主控单元、导航单元、无线通信单元,还设有驱动轮单元,第一物料传输单元,障碍物检测单元;所述物料传输平台设于物料装卸设备处;自动导引运输车通过导航单元按照规划路线运输至物料传输平台,并与对接单元完成对接,然后第一物料传输单元与第二物料传输单元进行物料的传输,第二物料传输单元传输物料至物料装卸设备或从物料装卸设备接收物料。本发明解决了现
一种智能物料搬运堆高车的物料搬运方法.pdf
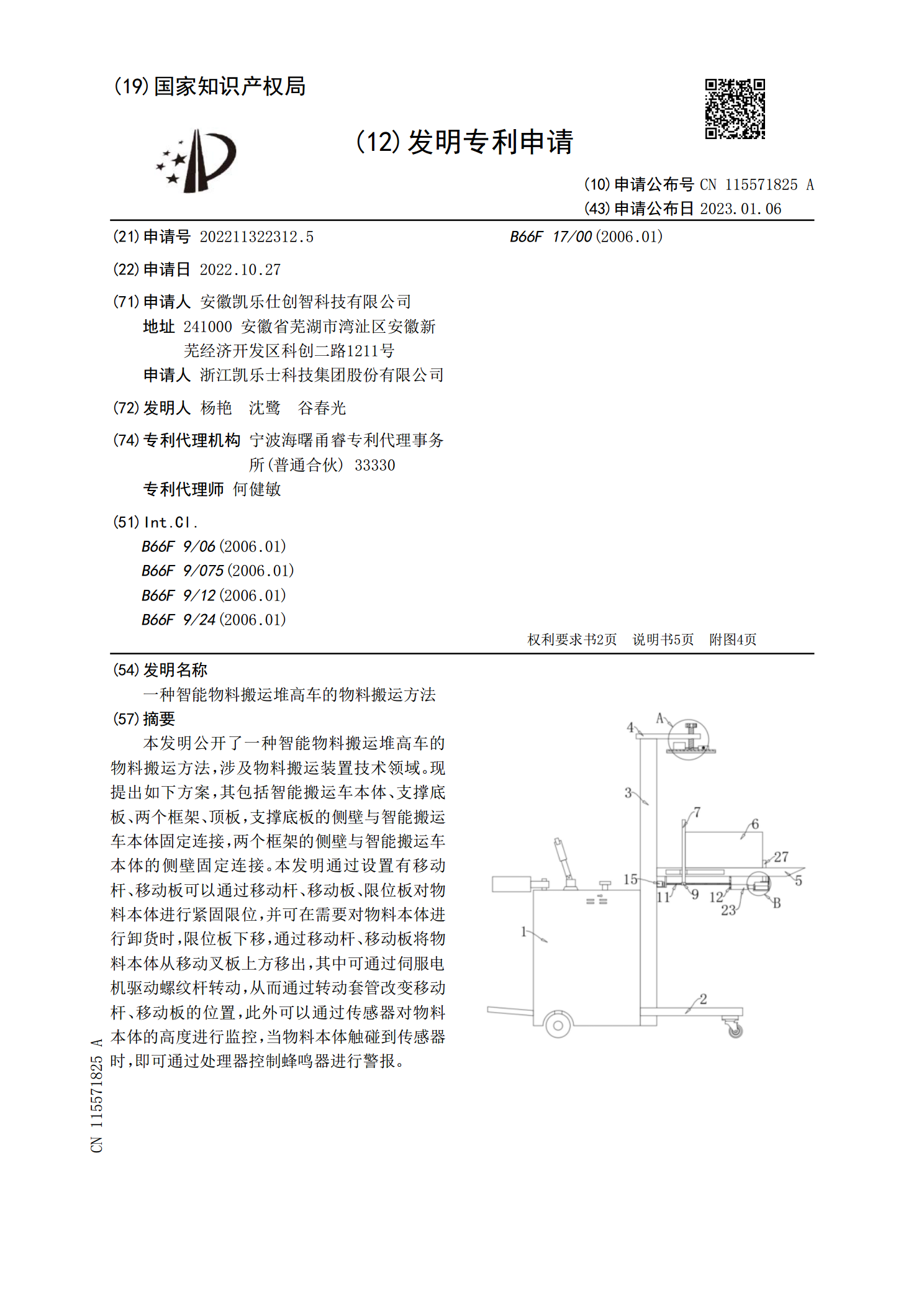
本发明公开了一种智能物料搬运堆高车的物料搬运方法,涉及物料搬运装置技术领域。现提出如下方案,其包括智能搬运车本体、支撑底板、两个框架、顶板,支撑底板的侧壁与智能搬运车本体固定连接,两个框架的侧壁与智能搬运车本体的侧壁固定连接。本发明通过设置有移动杆、移动板可以通过移动杆、移动板、限位板对物料本体进行紧固限位,并可在需要对物料本体进行卸货时,限位板下移,通过移动杆、移动板将物料本体从移动叉板上方移出,其中可通过伺服电机驱动螺纹杆转动,从而通过转动套管改变移动杆、移动板的位置,此外可以通过传感器对物料本体的高
一种智能物料搬运系统及搬运方法.pdf
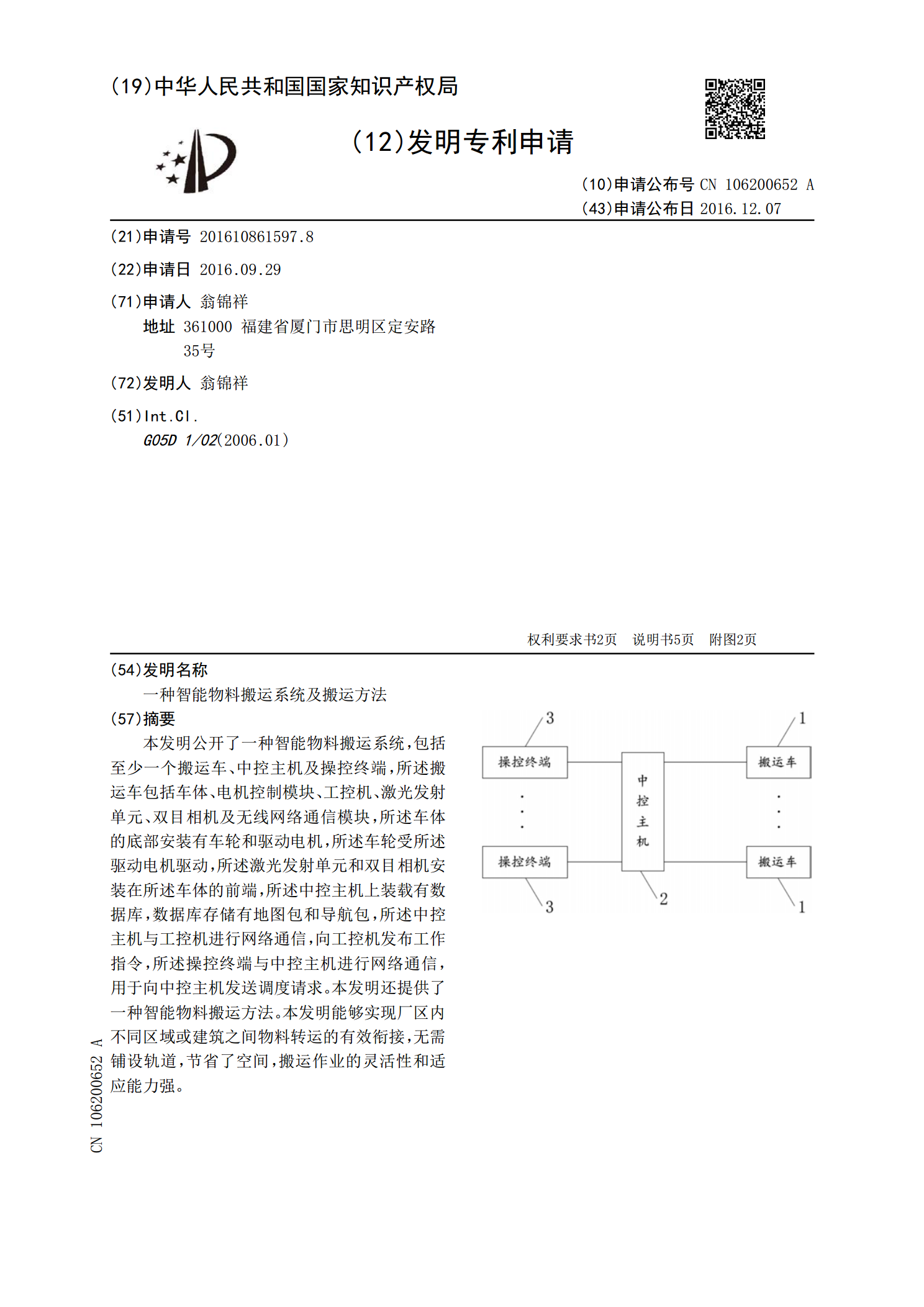
本发明公开了一种智能物料搬运系统,包括至少一个搬运车、中控主机及操控终端,所述搬运车包括车体、电机控制模块、工控机、激光发射单元、双目相机及无线网络通信模块,所述车体的底部安装有车轮和驱动电机,所述车轮受所述驱动电机驱动,所述激光发射单元和双目相机安装在所述车体的前端,所述中控主机上装载有数据库,数据库存储有地图包和导航包,所述中控主机与工控机进行网络通信,向工控机发布工作指令,所述操控终端与中控主机进行网络通信,用于向中控主机发送调度请求。本发明还提供了一种智能物料搬运方法。本发明能够实现厂区内不同区域