
自动驻车物料车、自动物料搬运系统及其搬运方法.pdf

猫巷****雪凝


1/10

2/10
3/10
4/10
5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

自动驻车物料车、自动物料搬运系统及其搬运方法.pdf
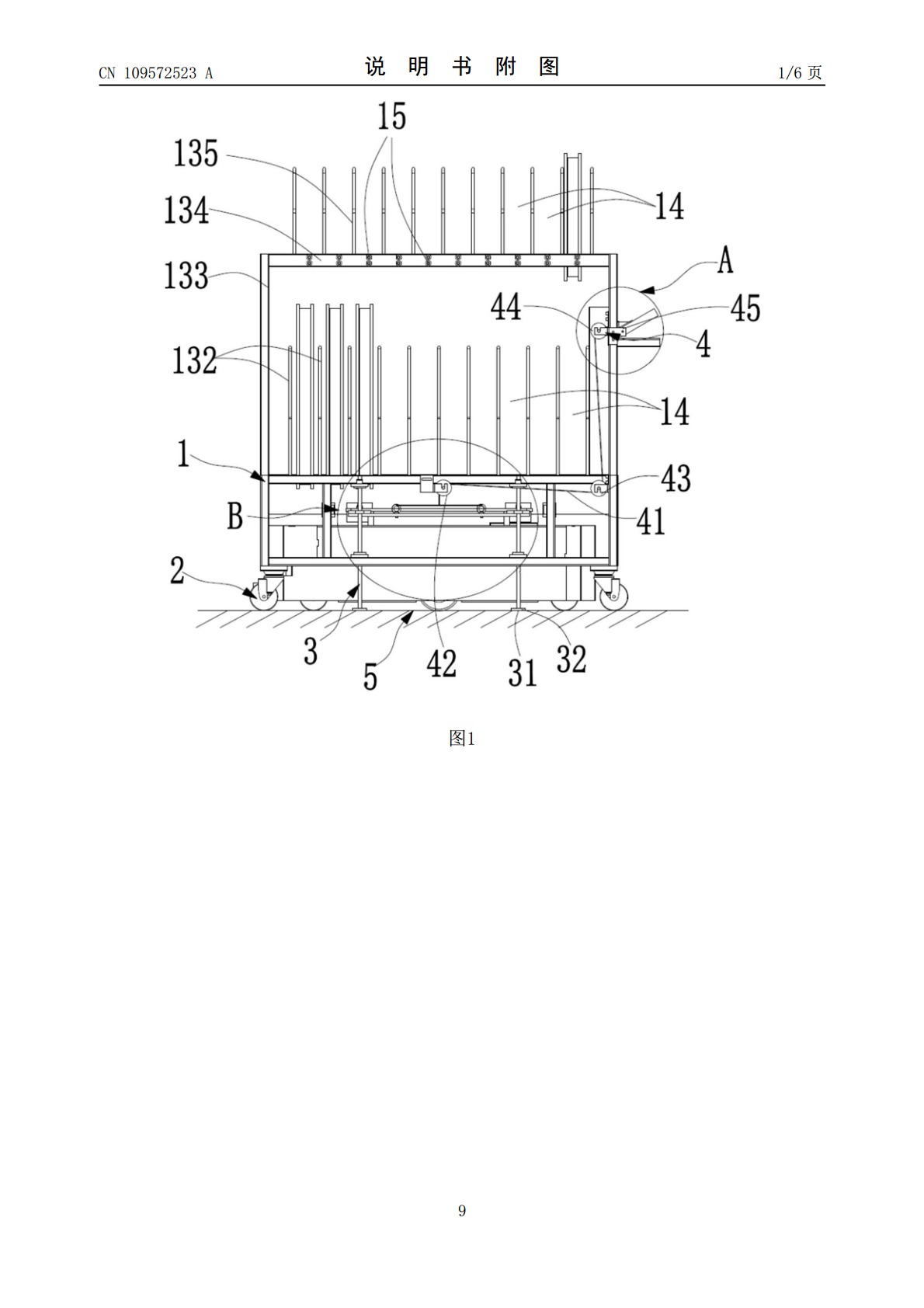
本发明揭示了自动驻车物料车、自动物料搬运系统及其搬运方法,其中自动驻车物料车包括车架,所述车架的底部设置有一组轮,所述车架上还设置有至少两个驻车立杆,常态下,所述驻车立杆的底面在自身重力作用下与轮所在的支撑面接触。本方案设计精巧,结构简单,通过设置一组驻车立杆,使它们常态下与轮所在的支撑面进行接触来增加物料车与支撑面的摩擦力,从而增加物料车由静止到运动所需要的动力的大小,增加物料车的启动难度,进而解决单独的万向轮结构易受外力产生自由移动的问题,有利于避免物料车出现移位,为与自动化搬运设备的结合使用奠定了基
一种智能物料搬运的自动导引车及其搬运方法.pdf
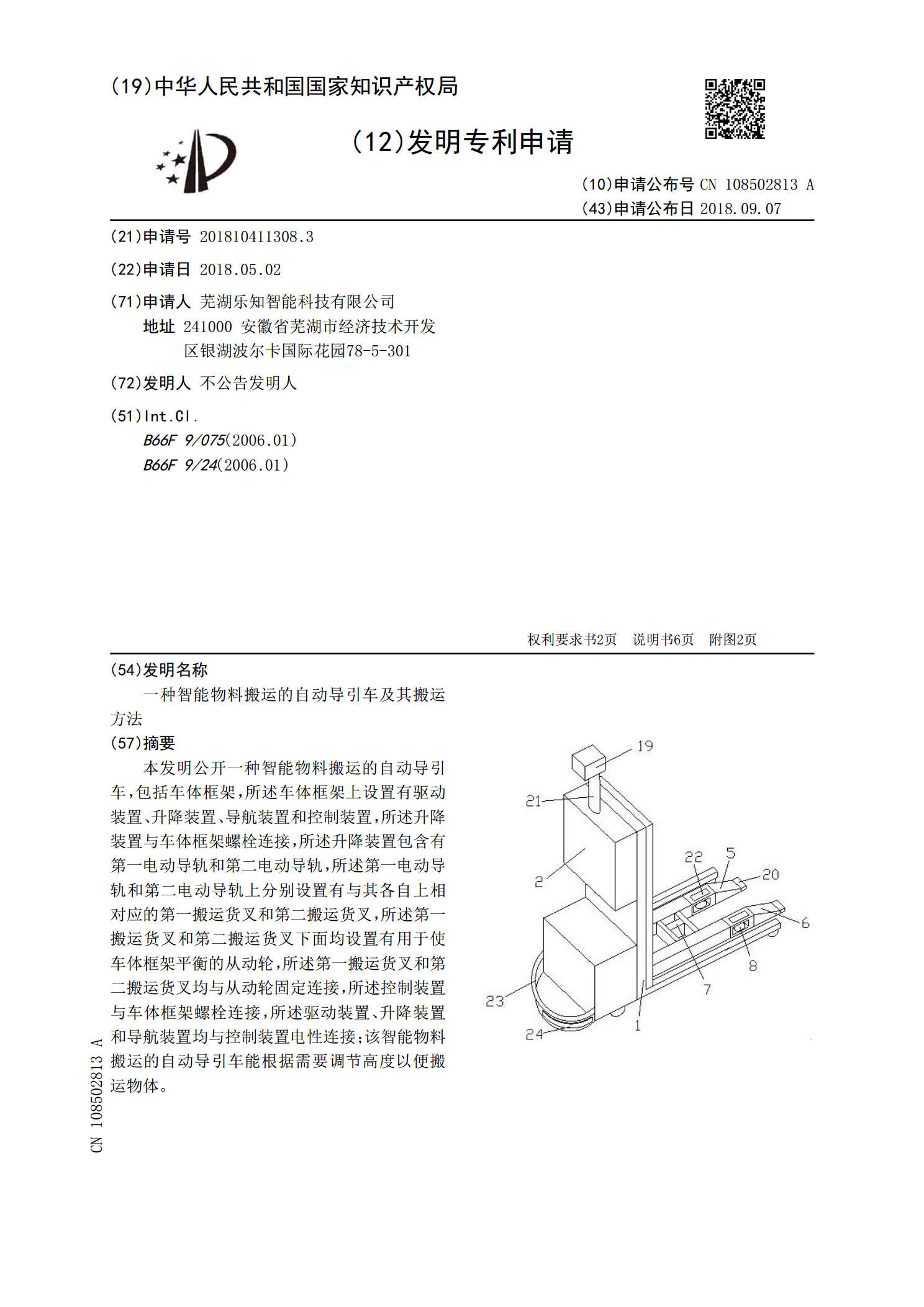
本发明公开一种智能物料搬运的自动导引车,包括车体框架,所述车体框架上设置有驱动装置、升降装置、导航装置和控制装置,所述升降装置与车体框架螺栓连接,所述升降装置包含有第一电动导轨和第二电动导轨,所述第一电动导轨和第二电动导轨上分别设置有与其各自上相对应的第一搬运货叉和第二搬运货叉,所述第一搬运货叉和第二搬运货叉下面均设置有用于使车体框架平衡的从动轮,所述第一搬运货叉和第二搬运货叉均与从动轮固定连接,所述控制装置与车体框架螺栓连接,所述驱动装置、升降装置和导航装置均与控制装置电性连接;该智能物料搬运的自动导引
自动搬运车和搬运系统.pdf
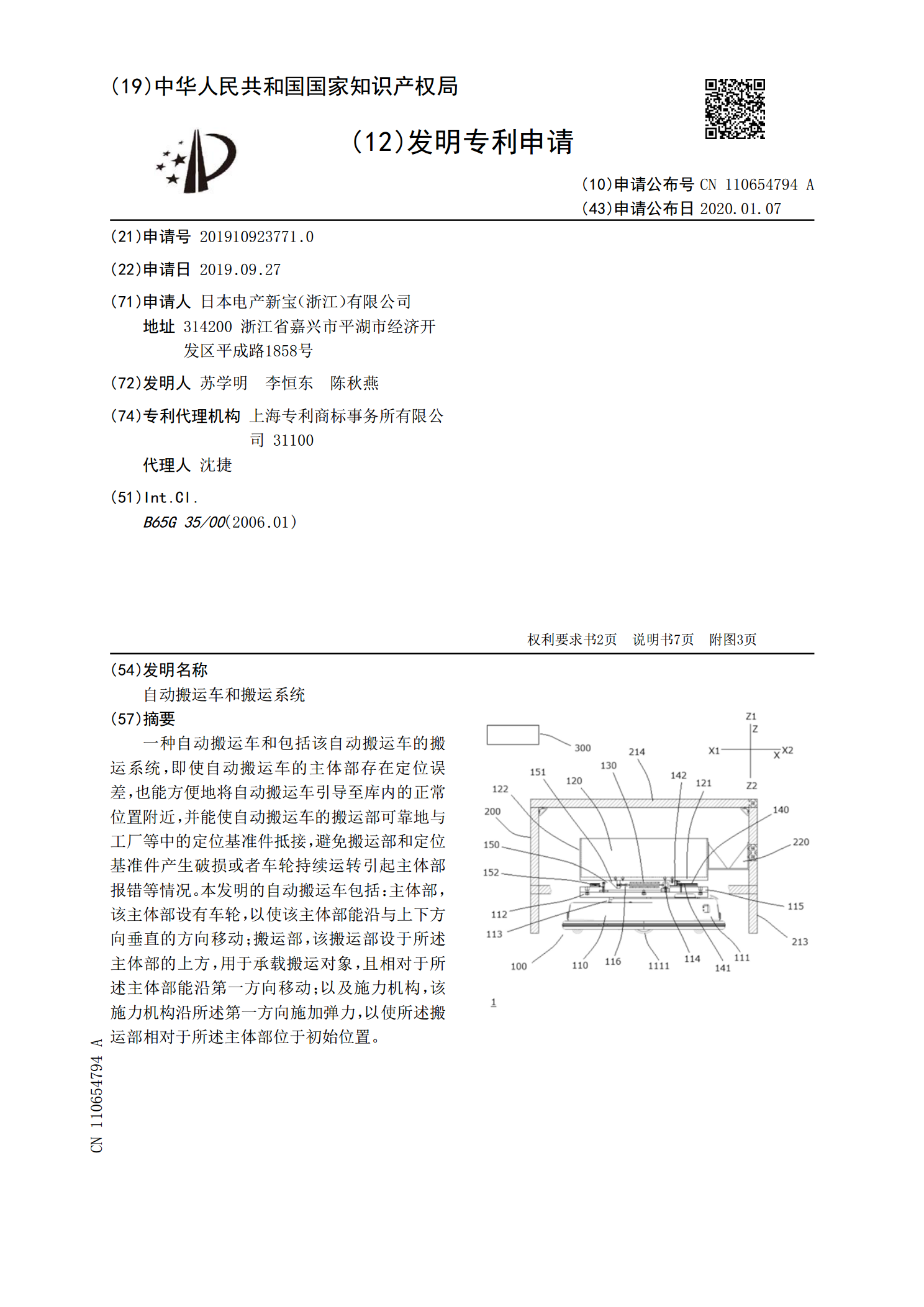
一种自动搬运车和包括该自动搬运车的搬运系统,即使自动搬运车的主体部存在定位误差,也能方便地将自动搬运车引导至库内的正常位置附近,并能使自动搬运车的搬运部可靠地与工厂等中的定位基准件抵接,避免搬运部和定位基准件产生破损或者车轮持续运转引起主体部报错等情况。本发明的自动搬运车包括:主体部,该主体部设有车轮,以使该主体部能沿与上下方向垂直的方向移动;搬运部,该搬运部设于所述主体部的上方,用于承载搬运对象,且相对于所述主体部能沿第一方向移动;以及施力机构,该施力机构沿所述第一方向施加弹力,以使所述搬运部相对于所述

自动搬运车以及自动搬运车的连结方法.pdf
本发明提供对于规模较小的搬运系统也容易导入的自动搬运车以及自动搬运车的连结方法。自动搬运车(1)通过组合牵引车(2)和搬运台车(10)而成,该牵引车(2)具有能够单独驱动的左右的驱动轮(211)、能够向能连接搬运台车(10)的连结位置突出的连结销(31A、31B)、对连结销(31A、31B)朝向连结位置施力的施力机构、以及将连结销(31A、31B)限制于后退位置的限制机构,该搬运台车(10)设置有底面,在该底面上开设有收容连结销(31A、31B)的连结孔(41、42)。
自动物料搬运系统的防火门装置、安装方法及搬运系统.pdf
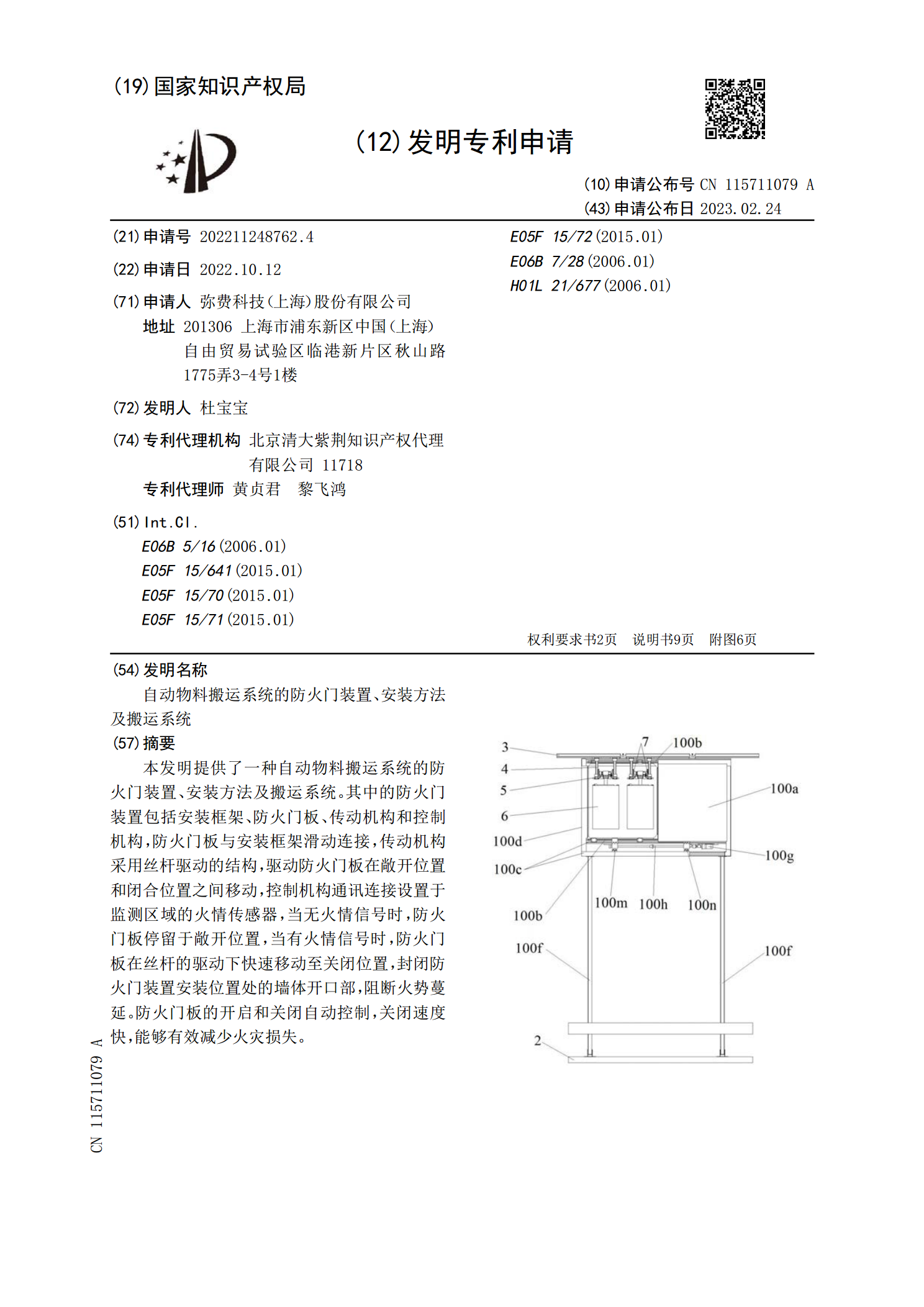
本发明提供了一种自动物料搬运系统的防火门装置、安装方法及搬运系统。其中的防火门装置包括安装框架、防火门板、传动机构和控制机构,防火门板与安装框架滑动连接,传动机构采用丝杆驱动的结构,驱动防火门板在敞开位置和闭合位置之间移动,控制机构通讯连接设置于监测区域的火情传感器,当无火情信号时,防火门板停留于敞开位置,当有火情信号时,防火门板在丝杆的驱动下快速移动至关闭位置,封闭防火门装置安装位置处的墙体开口部,阻断火势蔓延。防火门板的开启和关闭自动控制,关闭速度快,能够有效减少火灾损失。