
一种智能物料搬运堆高车的物料搬运方法.pdf

努力****元恺

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种智能物料搬运堆高车的物料搬运方法.pdf
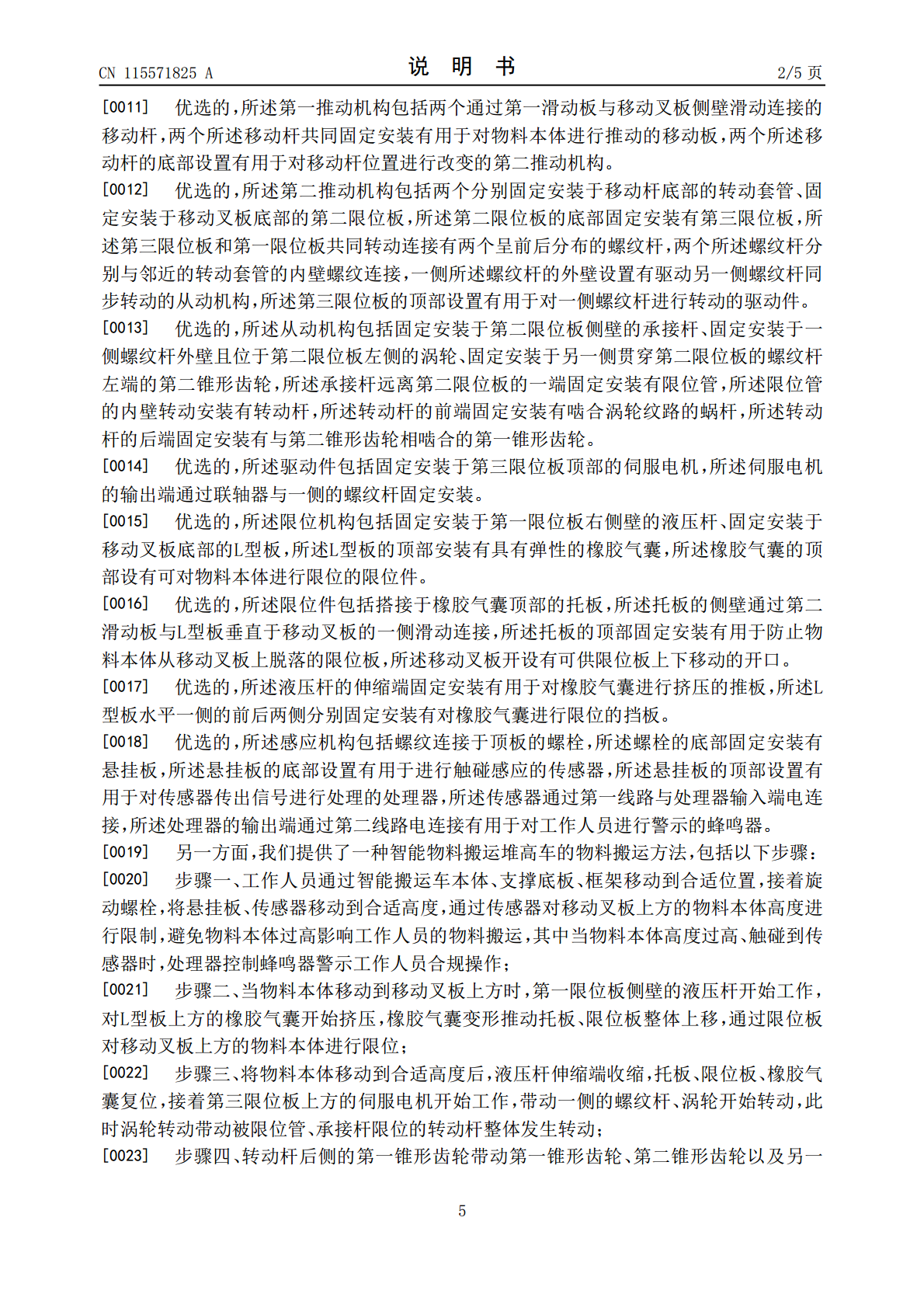
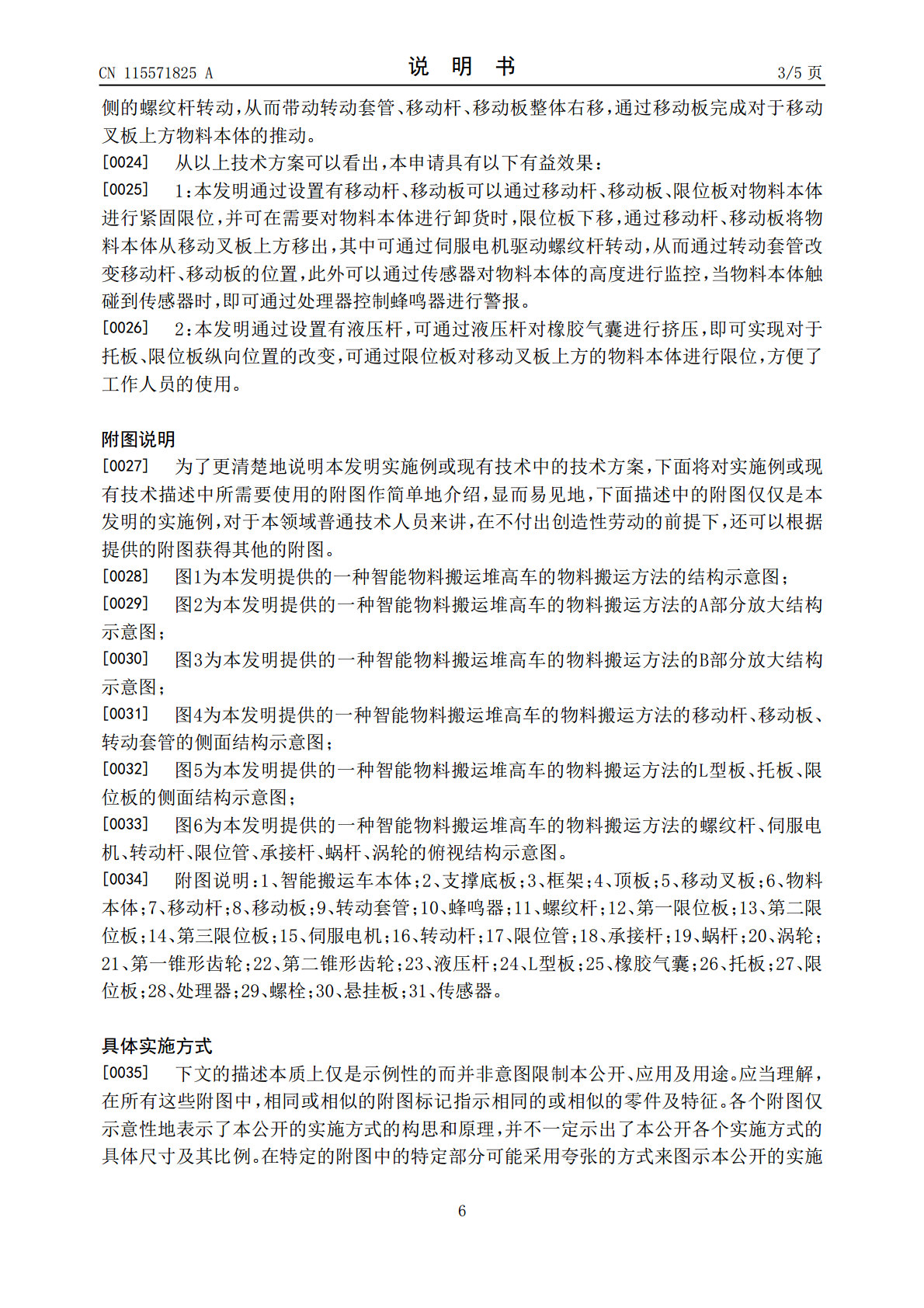
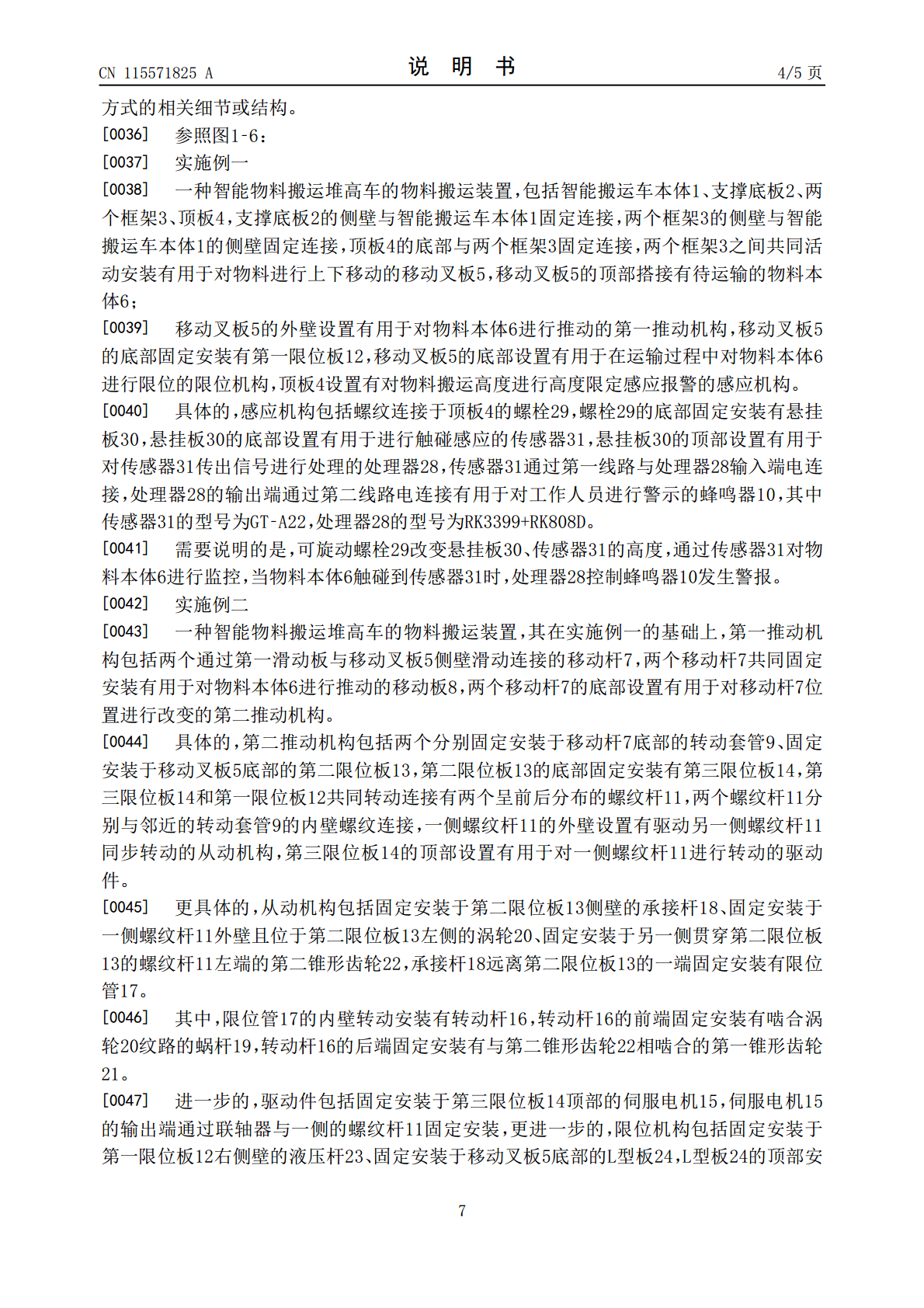
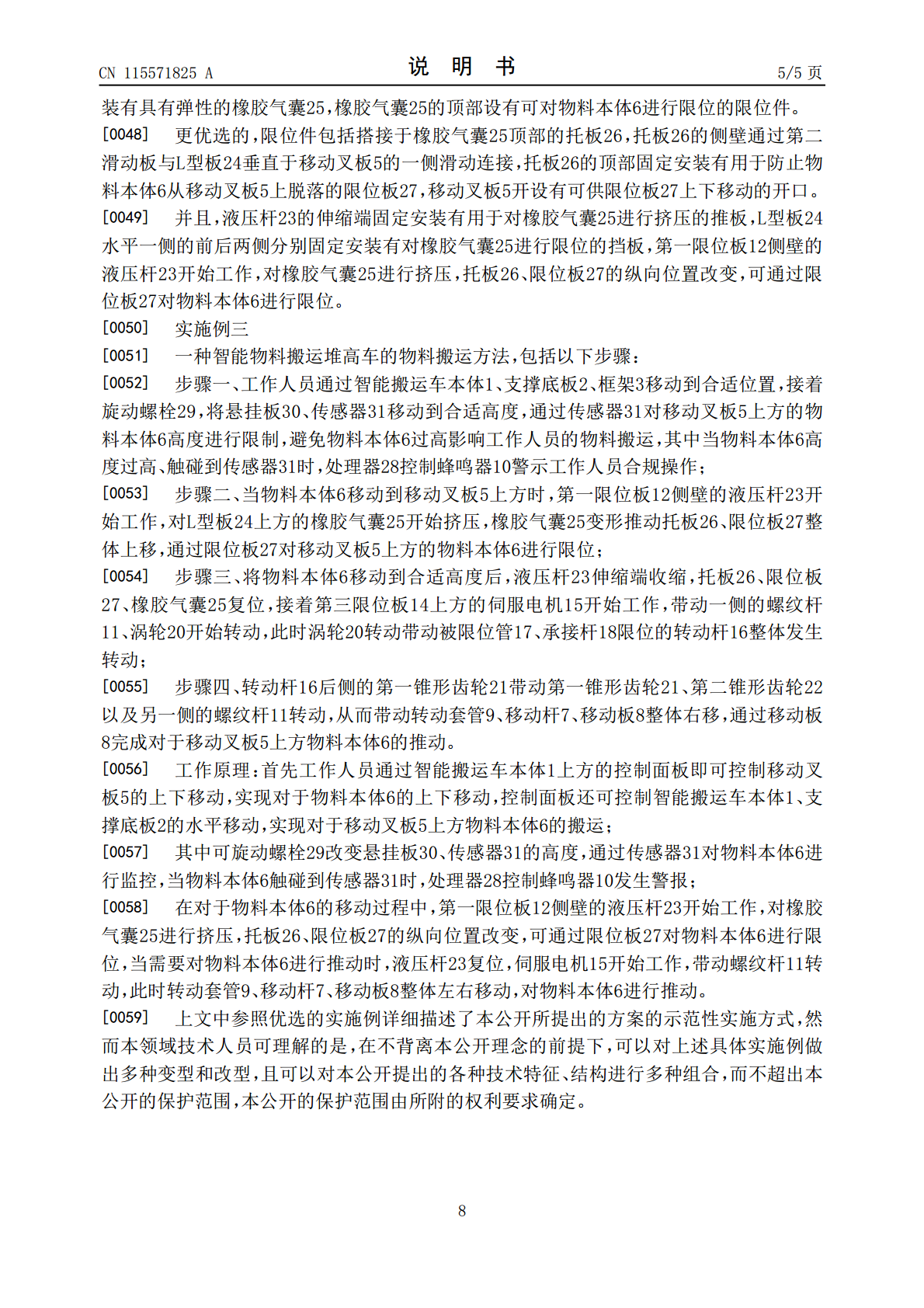
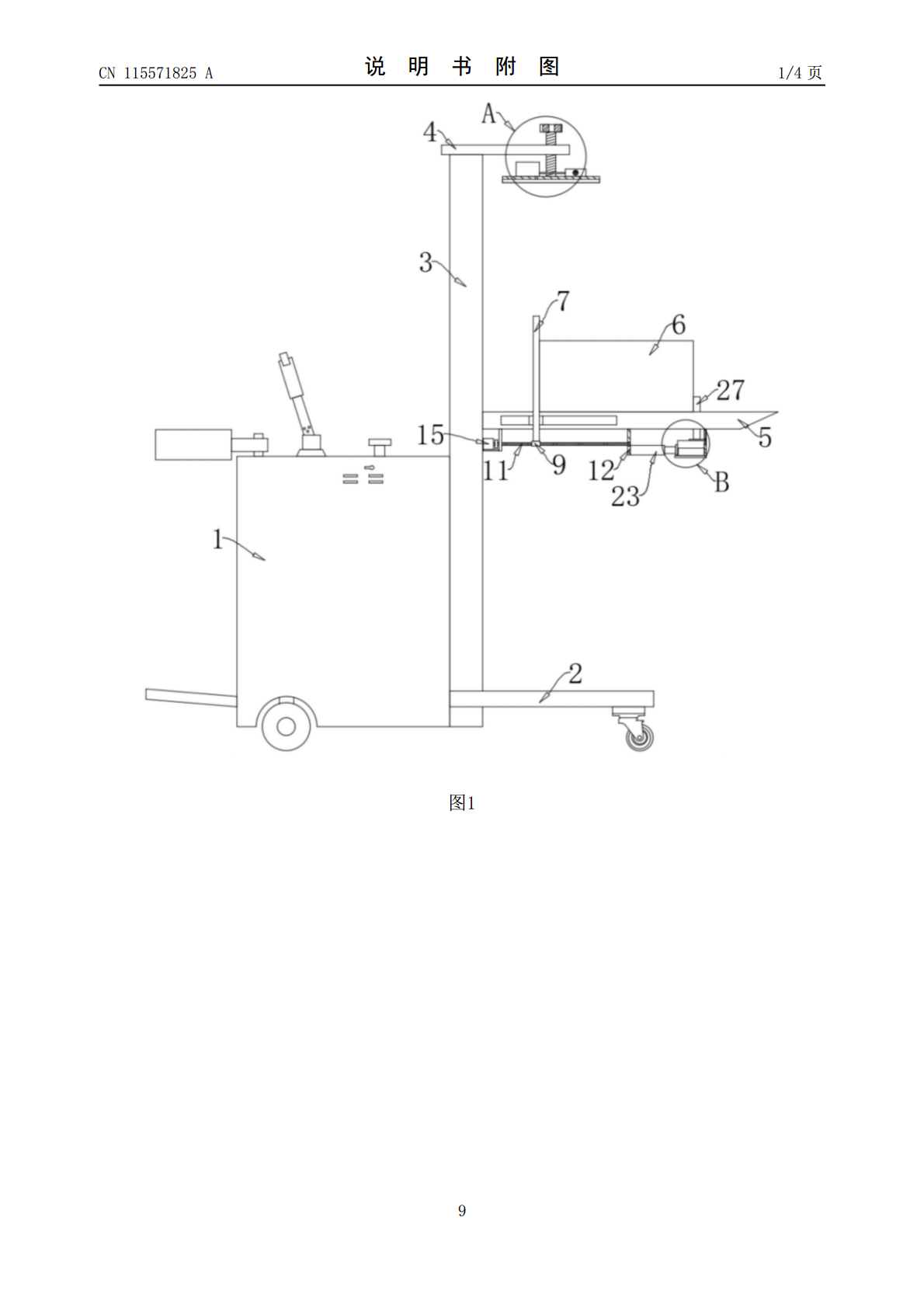
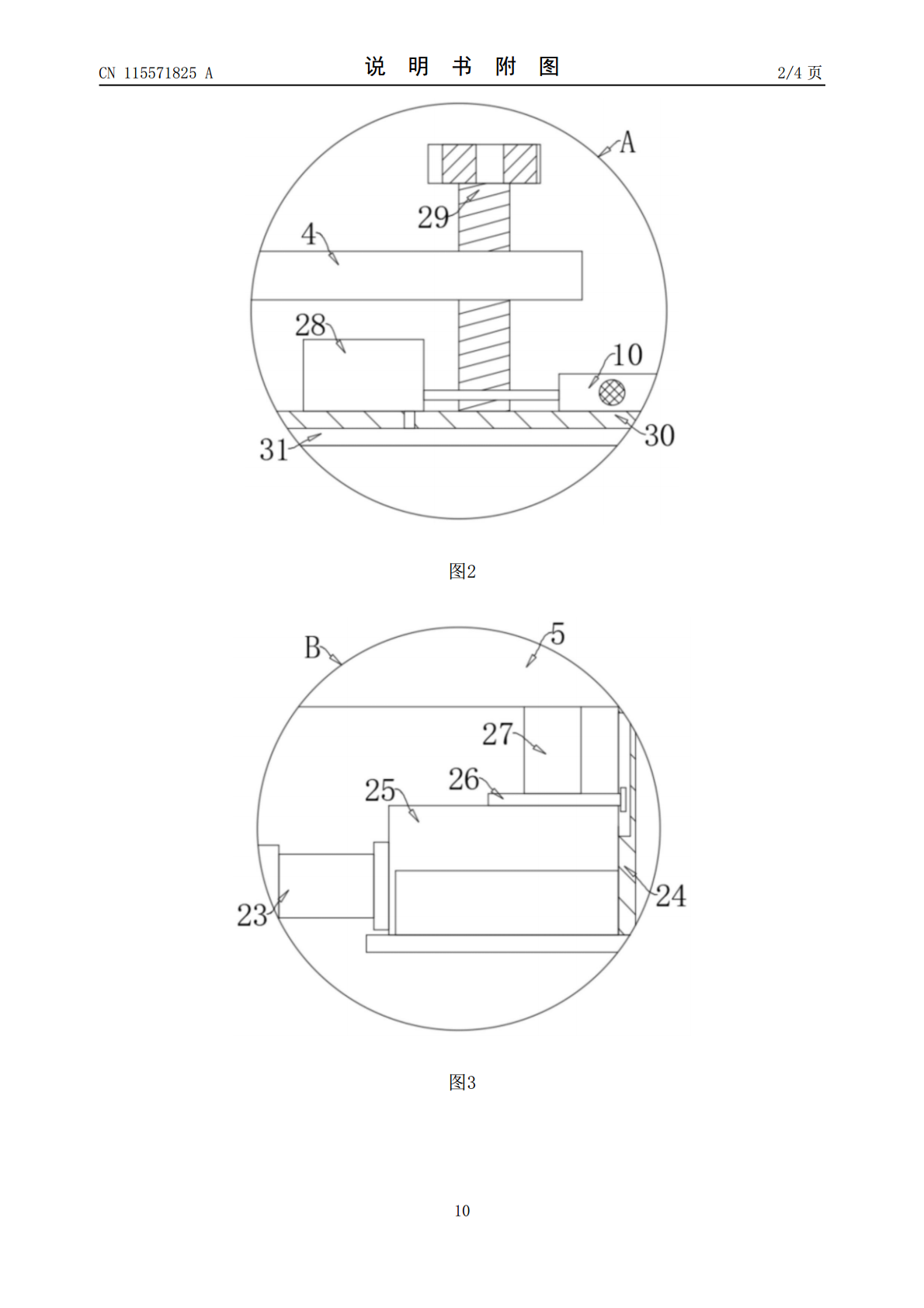
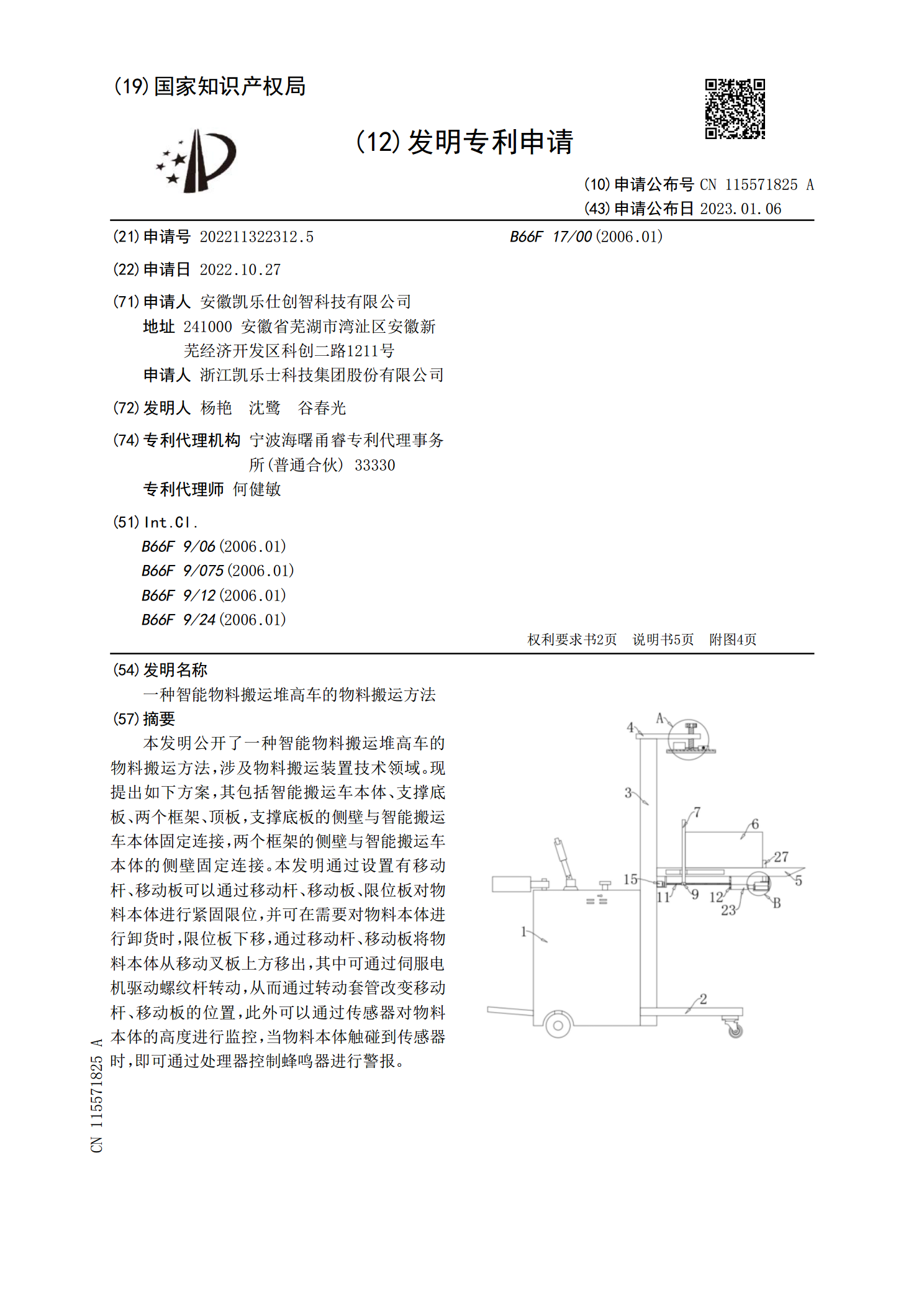
本发明公开了一种智能物料搬运堆高车的物料搬运方法,涉及物料搬运装置技术领域。现提出如下方案,其包括智能搬运车本体、支撑底板、两个框架、顶板,支撑底板的侧壁与智能搬运车本体固定连接,两个框架的侧壁与智能搬运车本体的侧壁固定连接。本发明通过设置有移动杆、移动板可以通过移动杆、移动板、限位板对物料本体进行紧固限位,并可在需要对物料本体进行卸货时,限位板下移,通过移动杆、移动板将物料本体从移动叉板上方移出,其中可通过伺服电机驱动螺纹杆转动,从而通过转动套管改变移动杆、移动板的位置,此外可以通过传感器对物料本体的高
一种智能物料搬运系统及搬运方法.pdf
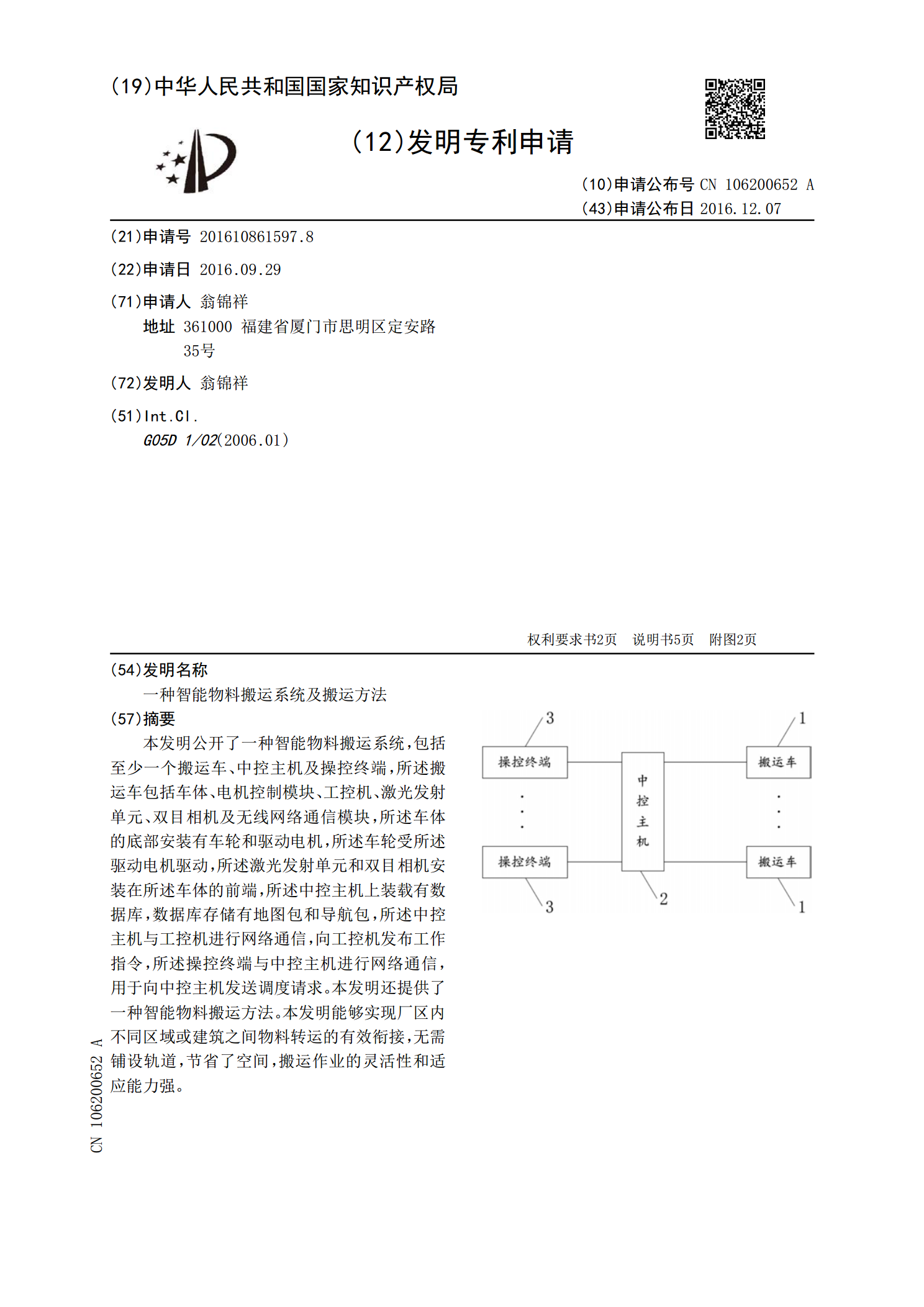
本发明公开了一种智能物料搬运系统,包括至少一个搬运车、中控主机及操控终端,所述搬运车包括车体、电机控制模块、工控机、激光发射单元、双目相机及无线网络通信模块,所述车体的底部安装有车轮和驱动电机,所述车轮受所述驱动电机驱动,所述激光发射单元和双目相机安装在所述车体的前端,所述中控主机上装载有数据库,数据库存储有地图包和导航包,所述中控主机与工控机进行网络通信,向工控机发布工作指令,所述操控终端与中控主机进行网络通信,用于向中控主机发送调度请求。本发明还提供了一种智能物料搬运方法。本发明能够实现厂区内不同区域

物料搬运方法和物料搬运装置.pdf
本发明实施例提出一种物料搬运方法和物料搬运装置,涉及仓库存储技术领域。该方法包括:接收出库请求;其中,出库请求包括待取物料的第一名称信息和第一数量信息;依据待取物料的第一名称信息、仓库的记录信息和仓库的属性信息生成出库任务;其中,属性信息包括每个区域块的物料摆放位置信息,区域块是仓库按照预设规则进行划分的,每个区域块之间不会干扰彼此的物料搬运,出库任务包括与第一数量信息对应的出库点位置信息;将出库任务发送至搬运小车,以使搬运小车依据出库任务将与第一数量信息对应的待取物料进行出库。本发明实施例的物料搬运方法
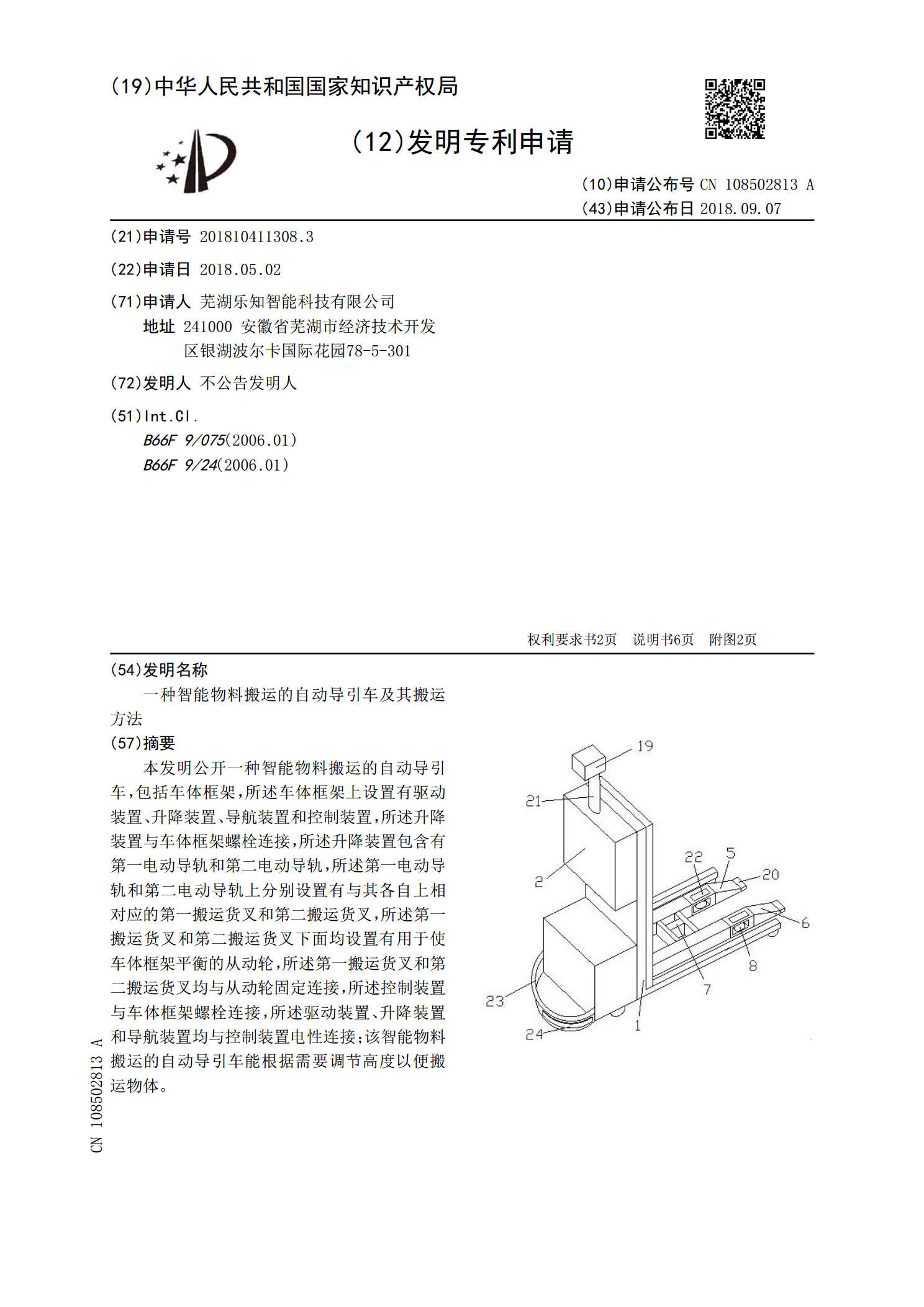
一种智能物料搬运的自动导引车及其搬运方法.pdf
本发明公开一种智能物料搬运的自动导引车,包括车体框架,所述车体框架上设置有驱动装置、升降装置、导航装置和控制装置,所述升降装置与车体框架螺栓连接,所述升降装置包含有第一电动导轨和第二电动导轨,所述第一电动导轨和第二电动导轨上分别设置有与其各自上相对应的第一搬运货叉和第二搬运货叉,所述第一搬运货叉和第二搬运货叉下面均设置有用于使车体框架平衡的从动轮,所述第一搬运货叉和第二搬运货叉均与从动轮固定连接,所述控制装置与车体框架螺栓连接,所述驱动装置、升降装置和导航装置均与控制装置电性连接;该智能物料搬运的自动导引
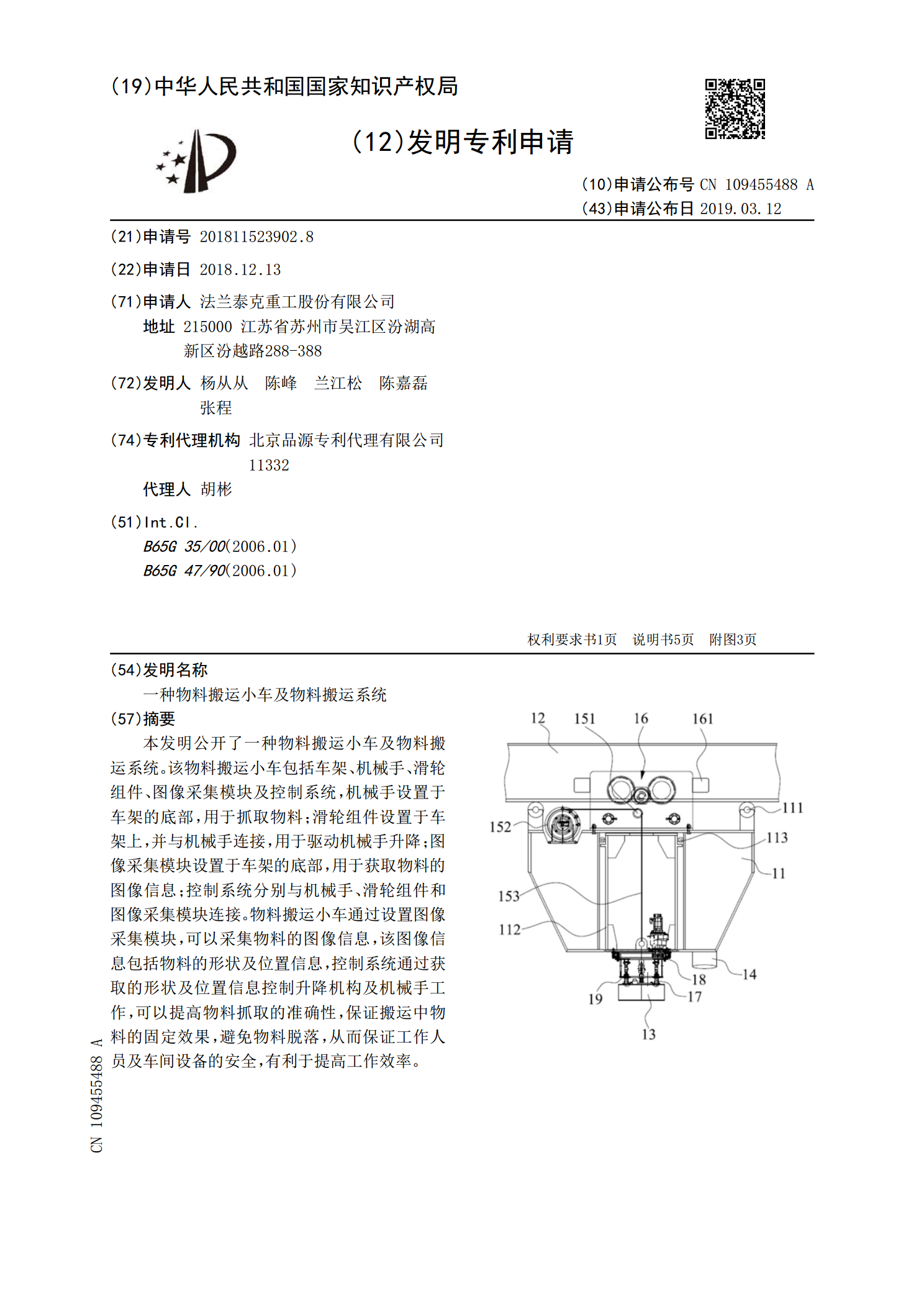
一种物料搬运小车及物料搬运系统.pdf
本发明公开了一种物料搬运小车及物料搬运系统。该物料搬运小车包括车架、机械手、滑轮组件、图像采集模块及控制系统,机械手设置于车架的底部,用于抓取物料;滑轮组件设置于车架上,并与机械手连接,用于驱动机械手升降;图像采集模块设置于车架的底部,用于获取物料的图像信息;控制系统分别与机械手、滑轮组件和图像采集模块连接。物料搬运小车通过设置图像采集模块,可以采集物料的图像信息,该图像信息包括物料的形状及位置信息,控制系统通过获取的形状及位置信息控制升降机构及机械手工作,可以提高物料抓取的准确性,保证搬运中物料的固定效