
自走式清洁装置及其建立室内地图的方法.pdf

森林****io

1/10
2/10
3/10
4/10
5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
自走式清洁装置及其建立室内地图的方法.pdf
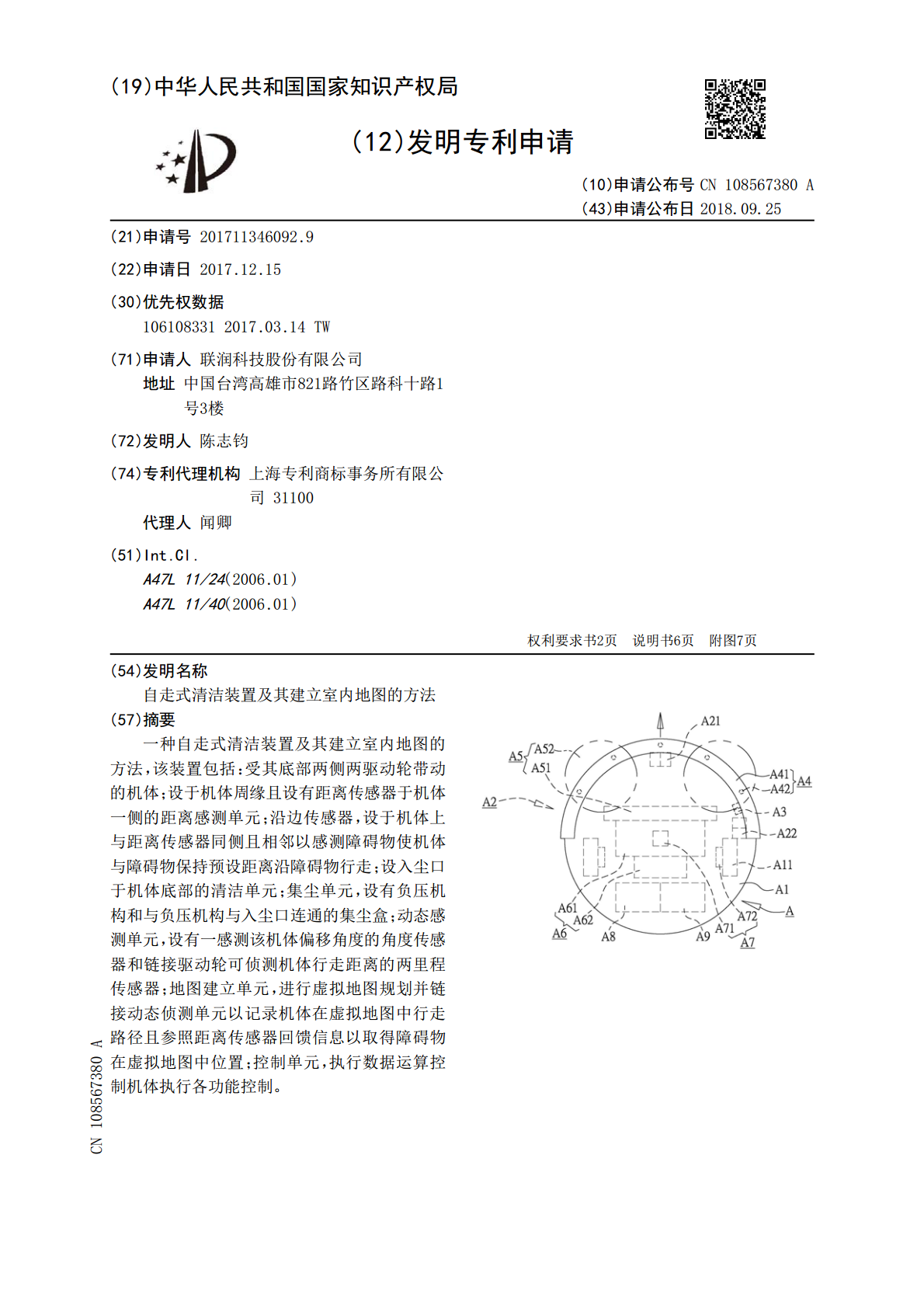
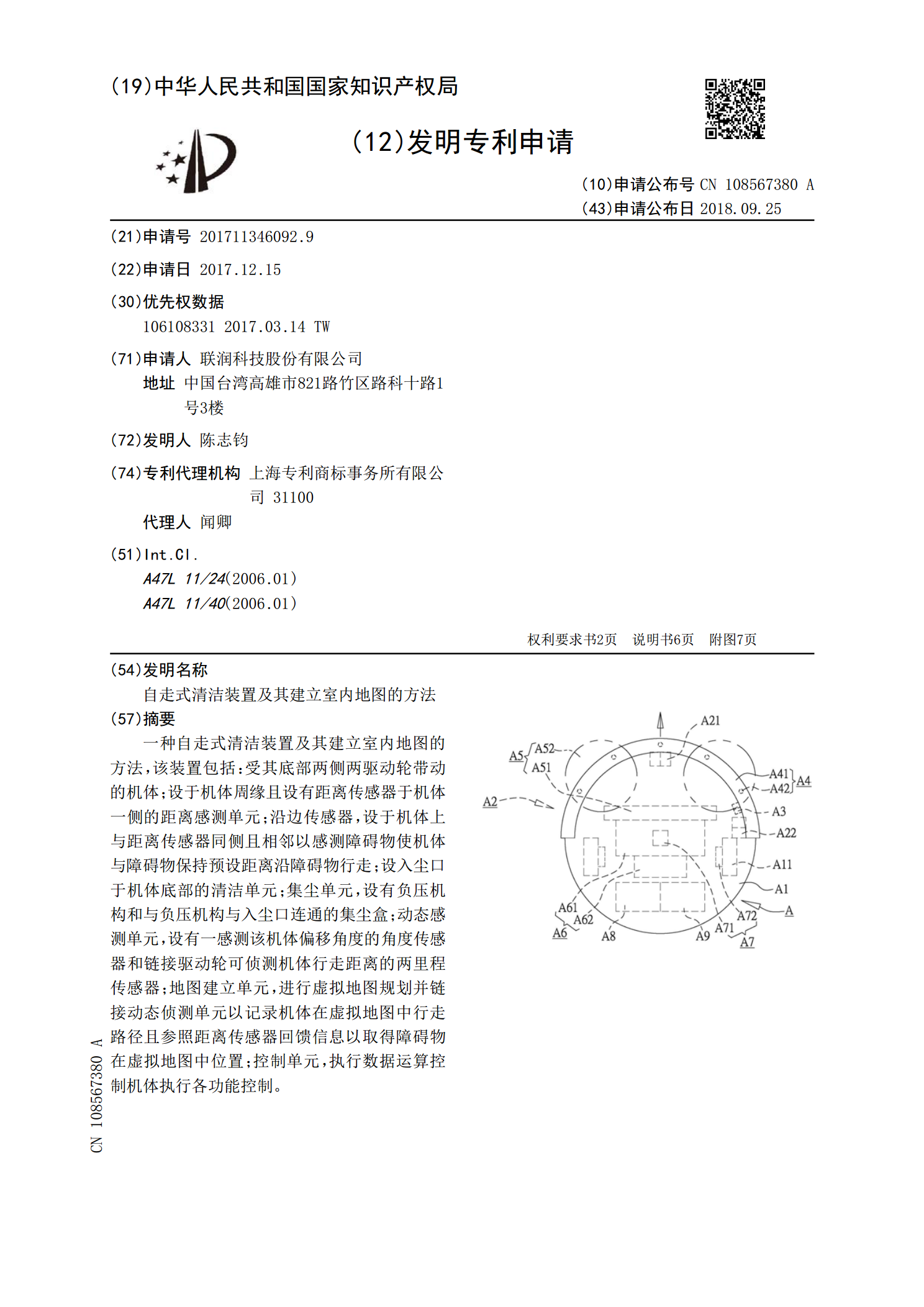
一种自走式清洁装置及其建立室内地图的方法,该装置包括:受其底部两侧两驱动轮带动的机体;设于机体周缘且设有距离传感器于机体一侧的距离感测单元;沿边传感器,设于机体上与距离传感器同侧且相邻以感测障碍物使机体与障碍物保持预设距离沿障碍物行走;设入尘口于机体底部的清洁单元;集尘单元,设有负压机构和与负压机构与入尘口连通的集尘盒;动态感测单元,设有一感测该机体偏移角度的角度传感器和链接驱动轮可侦测机体行走距离的两里程传感器;地图建立单元,进行虚拟地图规划并链接动态侦测单元以记录机体在虚拟地图中行走路径且参照距离传感

自走式电子装置及其控制自走式电子装置行为的方法.pdf
本发明涉及一种自走式电子装置及其控制自走式电子装置行为的方法。该自走式电子装置包括:一轮组、一马达、一马达控制模块、一动态感应模块以及一处理模块;该马达与该轮组相连接,用以驱动该轮组;该马达控制模块与该马达电性连接,用以控制该马达;该动态感应模块用以根据该自走式电子装置所接触的一环境状态检测出一感应信号;该处理模块与该马达控制模块及该动态感应模块电性连接,以接收该感应信号;其中当该感应信号为一移动异常信号时,该处理模块根据该移动异常信号以藉由该马达控制模块控制该马达,并进一步调整该轮组以适应该环境状态。本

自走式清洁装置.pdf
本发明提供一种自走式清洁装置,包括:一清洁机构,设于自走式清洁装置壳体底部,可拨扫污尘并将污尘吸入一集尘机构内收集;一容室,凹设于自走式清洁装置壳体底部两侧,形成一罩壳,容室内设有一隔板,将该容室分隔成一第一容室与一第二容室;一驱动装置,设于该容室内,设有包括一驱动轮与一驱动模块,该驱动模块具有一套壳,该套壳内设有包括一马达与一齿轮组;该驱动轮设于该第一容室内而该驱动模块设于该第二容室内,且该套壳一端,马达设置处设有一第二枢接部与该罩壳相枢接,另一端,齿轮组设置处设有一弹性件与该罩壳相抵触。

自走式清洁装置.pdf
本发明提供一种自走式清洁装置,其机体延伸一凸出部使侧刷机构靠近轮廓外缘;并在驱动轮组与机体间设有弹性元件提供缓冲及避震;机体前缘至入尘口形成凹设区间使灰尘导引流向机体容槽内集尘盒;容槽设有与控制单元间隔的第一间隔件以及与置设负压装置载置空间间隔的第二间隔件;第二间隔件开有通道使容槽与载置空间相通;集尘盒设有相隔的第一侧边和第二侧边;第一侧边设负压出口;负压装置设有负压导引道及负压入口,其对应机体容槽第二间隔件上镂空通道及集尘盒上负压出口,使空气可流通其间。
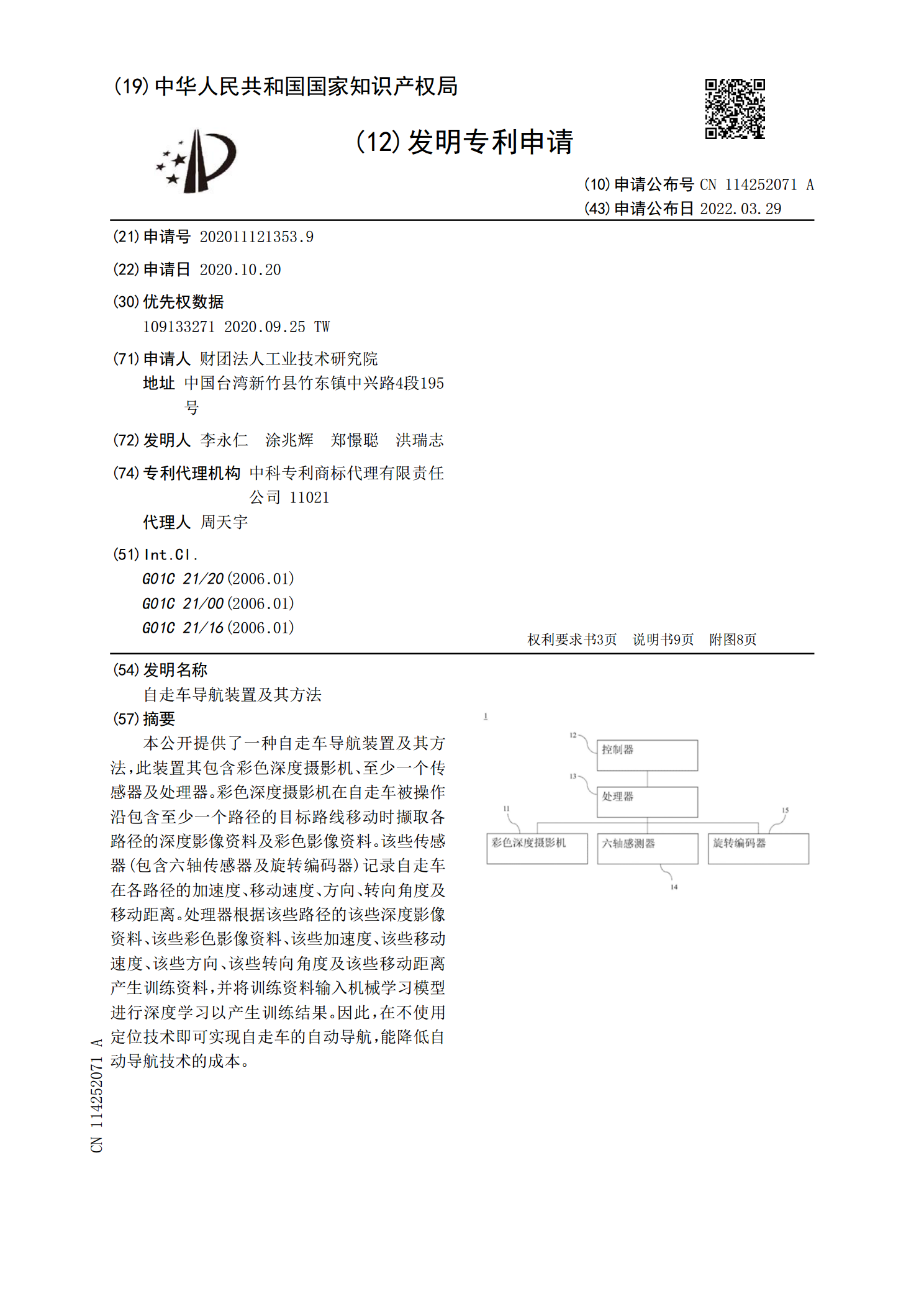
自走车导航装置及其方法.pdf
本公开提供了一种自走车导航装置及其方法,此装置其包含彩色深度摄影机、至少一个传感器及处理器。彩色深度摄影机在自走车被操作沿包含至少一个路径的目标路线移动时撷取各路径的深度影像资料及彩色影像资料。该些传感器(包含六轴传感器及旋转编码器)记录自走车在各路径的加速度、移动速度、方向、转向角度及移动距离。处理器根据该些路径的该些深度影像资料、该些彩色影像资料、该些加速度、该些移动速度、该些方向、该些转向角度及该些移动距离产生训练资料,并将训练资料输入机械学习模型进行深度学习以产生训练结果。因此,在不使用定位技术即