
自走式电子装置及其控制自走式电子装置行为的方法.pdf

是你****盟主


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

自走式电子装置及其控制自走式电子装置行为的方法.pdf
本发明涉及一种自走式电子装置及其控制自走式电子装置行为的方法。该自走式电子装置包括:一轮组、一马达、一马达控制模块、一动态感应模块以及一处理模块;该马达与该轮组相连接,用以驱动该轮组;该马达控制模块与该马达电性连接,用以控制该马达;该动态感应模块用以根据该自走式电子装置所接触的一环境状态检测出一感应信号;该处理模块与该马达控制模块及该动态感应模块电性连接,以接收该感应信号;其中当该感应信号为一移动异常信号时,该处理模块根据该移动异常信号以藉由该马达控制模块控制该马达,并进一步调整该轮组以适应该环境状态。本
自走式电子设备及所述自走式电子设备的行走方法.pdf
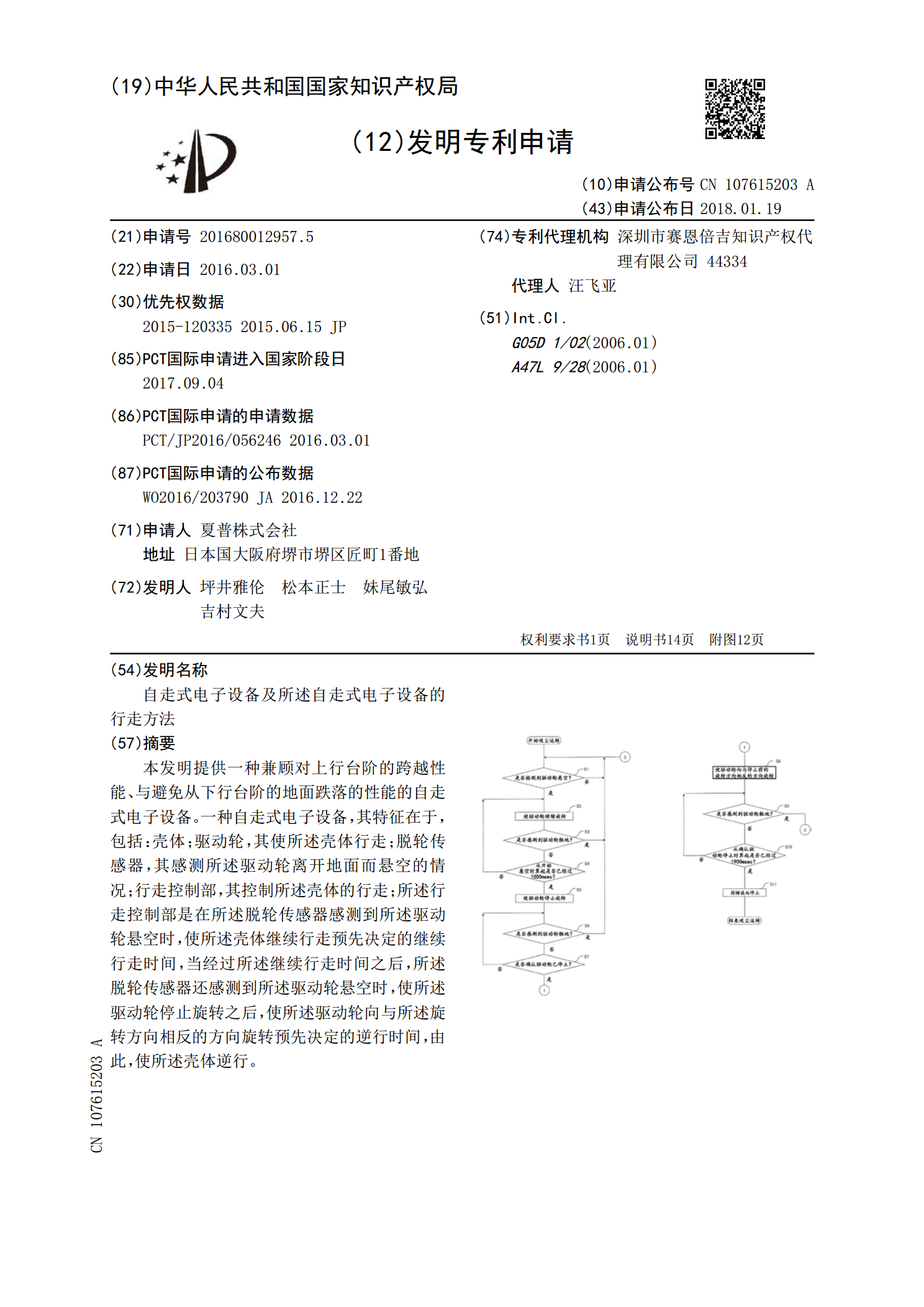
本发明提供一种兼顾对上行台阶的跨越性能、与避免从下行台阶的地面跌落的性能的自走式电子设备。一种自走式电子设备,其特征在于,包括:壳体;驱动轮,其使所述壳体行走;脱轮传感器,其感测所述驱动轮离开地面而悬空的情况;行走控制部,其控制所述壳体的行走;所述行走控制部是在所述脱轮传感器感测到所述驱动轮悬空时,使所述壳体继续行走预先决定的继续行走时间,当经过所述继续行走时间之后,所述脱轮传感器还感测到所述驱动轮悬空时,使所述驱动轮停止旋转之后,使所述驱动轮向与所述旋转方向相反的方向旋转预先决定的逆行时间,由此,使所述

自走式电子设备及所述自走式电子设备的行走方法.pdf
本发明提供一种即便进入被障碍物或下行台阶等无法行走的区域卡住的场所也能高效地脱离的自走式电子设备。一种自走式电子设备,其特征在于,包括:壳体;驱动轮,其使所述壳体行走;行走控制部,其控制所述壳体的行走;周边感测传感器,其感测所述壳体周边的无法行走区域;所述驱动轮包含彼此独立地受驱动的左驱动轮及右驱动轮,当所述周边感测传感器感测到所述壳体的左前方为无法行走区域时,所述行走控制部以所述左驱动轮的旋转量小于所述右驱动轮的旋转量的方式,使所述左驱动轮及所述右驱动轮后退,当所述周边感测传感器感测到所述壳体的右前方为
自走式电子机器.pdf
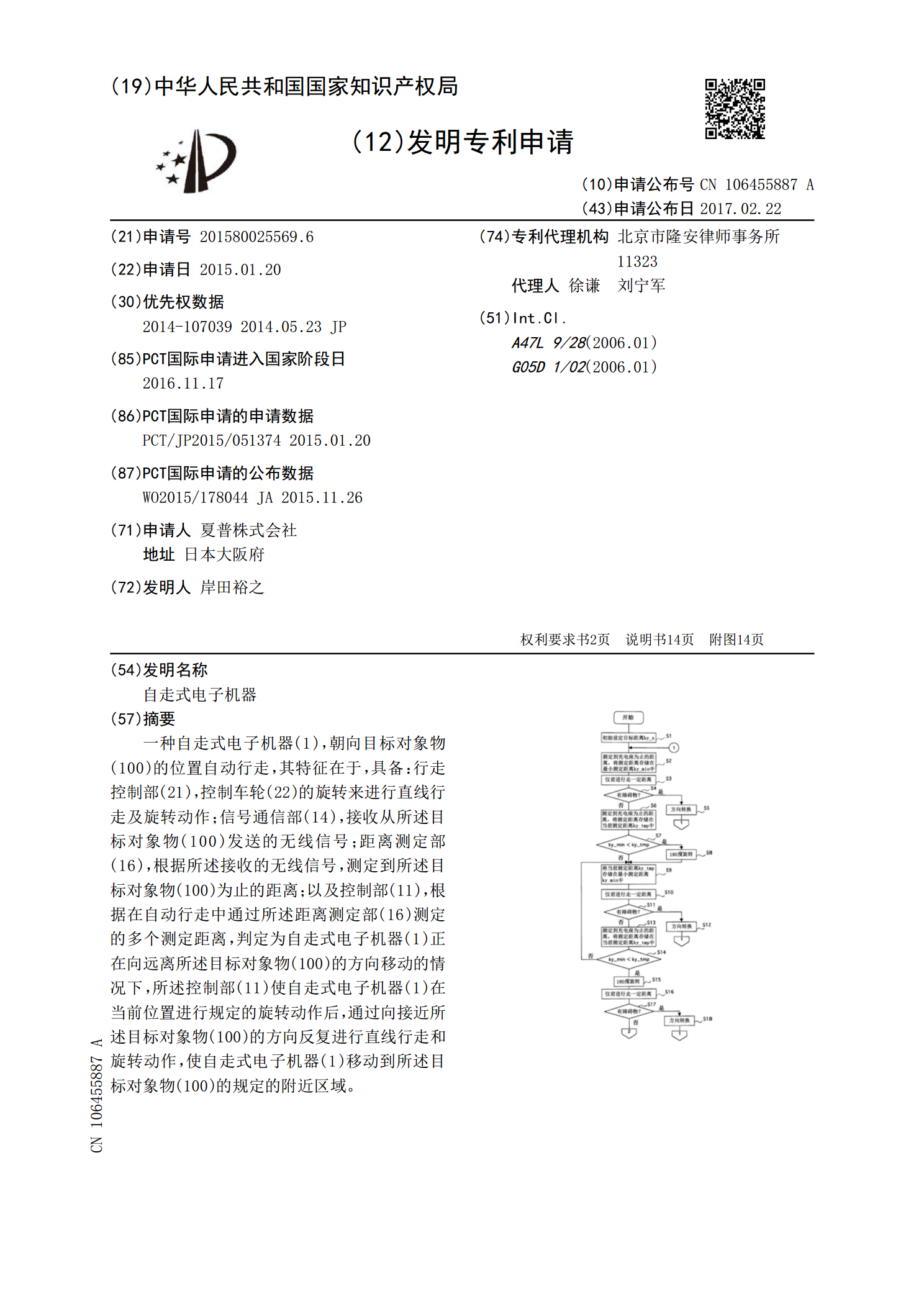
一种自走式电子机器(1),朝向目标对象物(100)的位置自动行走,其特征在于,具备:行走控制部(21),控制车轮(22)的旋转来进行直线行走及旋转动作;信号通信部(14),接收从所述目标对象物(100)发送的无线信号;距离测定部(16),根据所述接收的无线信号,测定到所述目标对象物(100)为止的距离;以及控制部(11),根据在自动行走中通过所述距离测定部(16)测定的多个测定距离,判定为自走式电子机器(1)正在向远离所述目标对象物(100)的方向移动的情况下,所述控制部(11)使自走式电子机器(1)在当
自走式电子机器.pdf
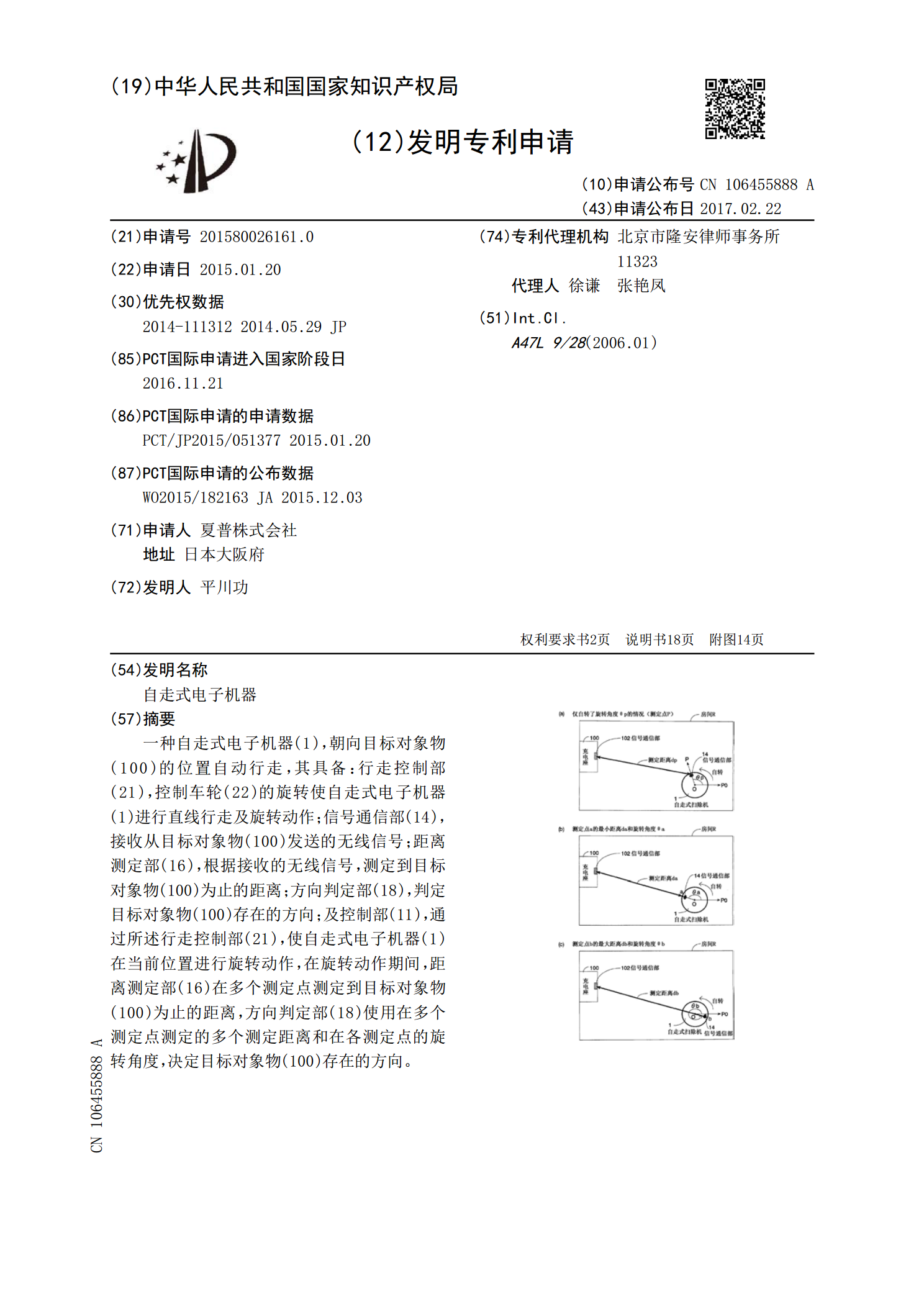
一种自走式电子机器(1),朝向目标对象物(100)的位置自动行走,其具备:行走控制部(21),控制车轮(22)的旋转使自走式电子机器(1)进行直线行走及旋转动作;信号通信部(14),接收从目标对象物(100)发送的无线信号;距离测定部(16),根据接收的无线信号,测定到目标对象物(100)为止的距离;方向判定部(18),判定目标对象物(100)存在的方向;及控制部(11),通过所述行走控制部(21),使自走式电子机器(1)在当前位置进行旋转动作,在旋转动作期间,距离测定部(16)在多个测定点测定到目标对象