
自走车导航装置及其方法.pdf

和裕****az

1/10
2/10
3/10
4/10
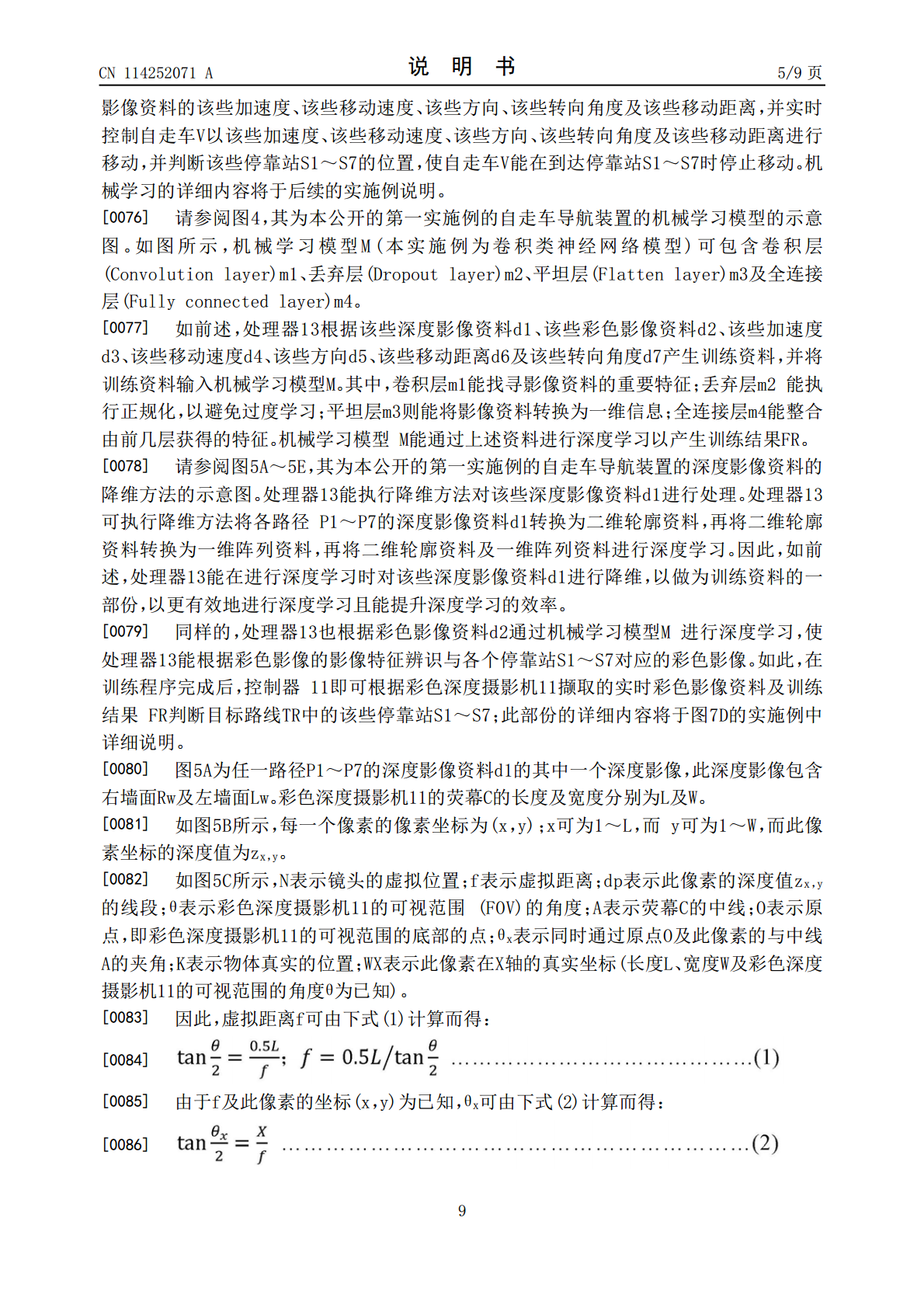
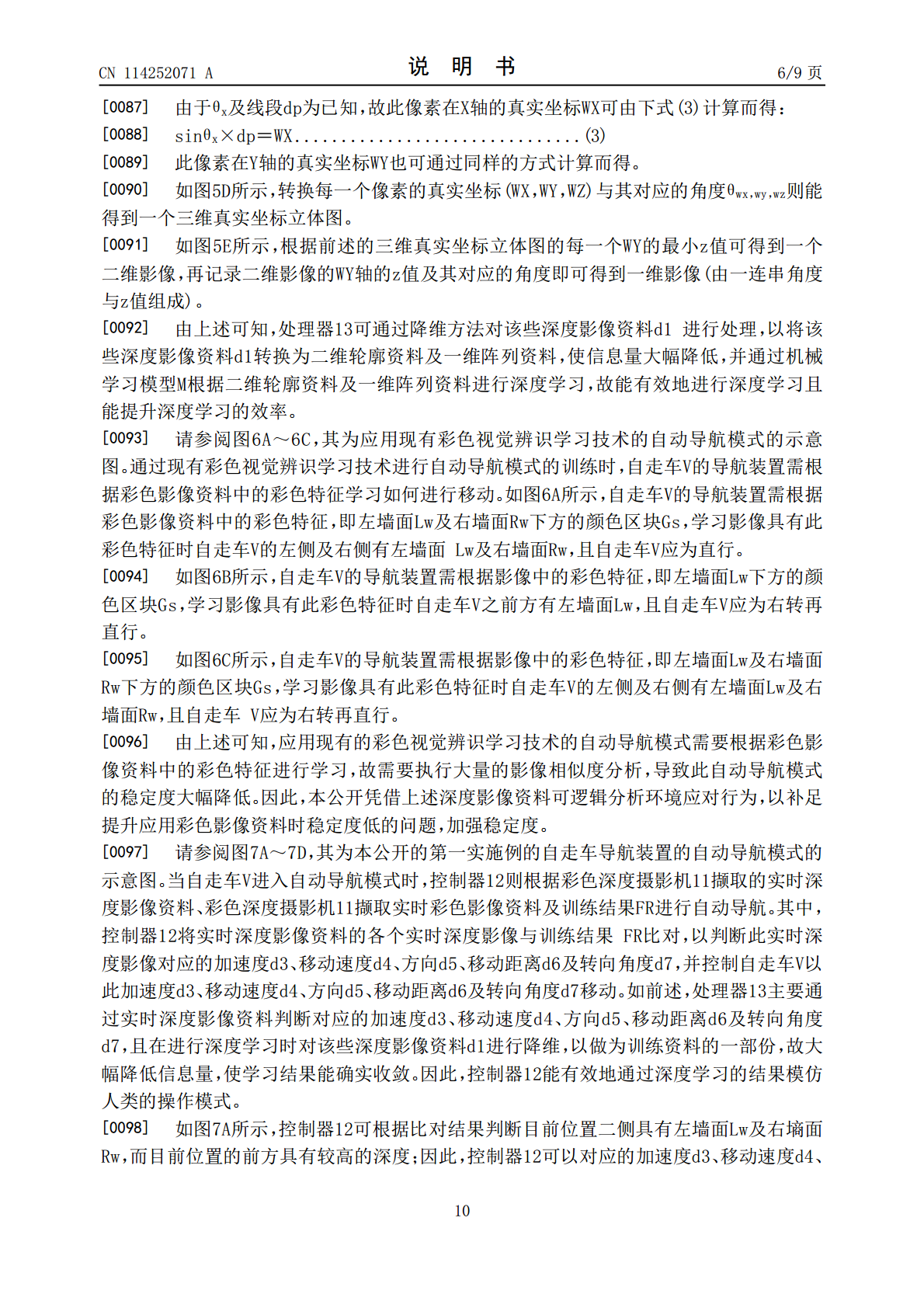
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
自走车导航装置及其方法.pdf
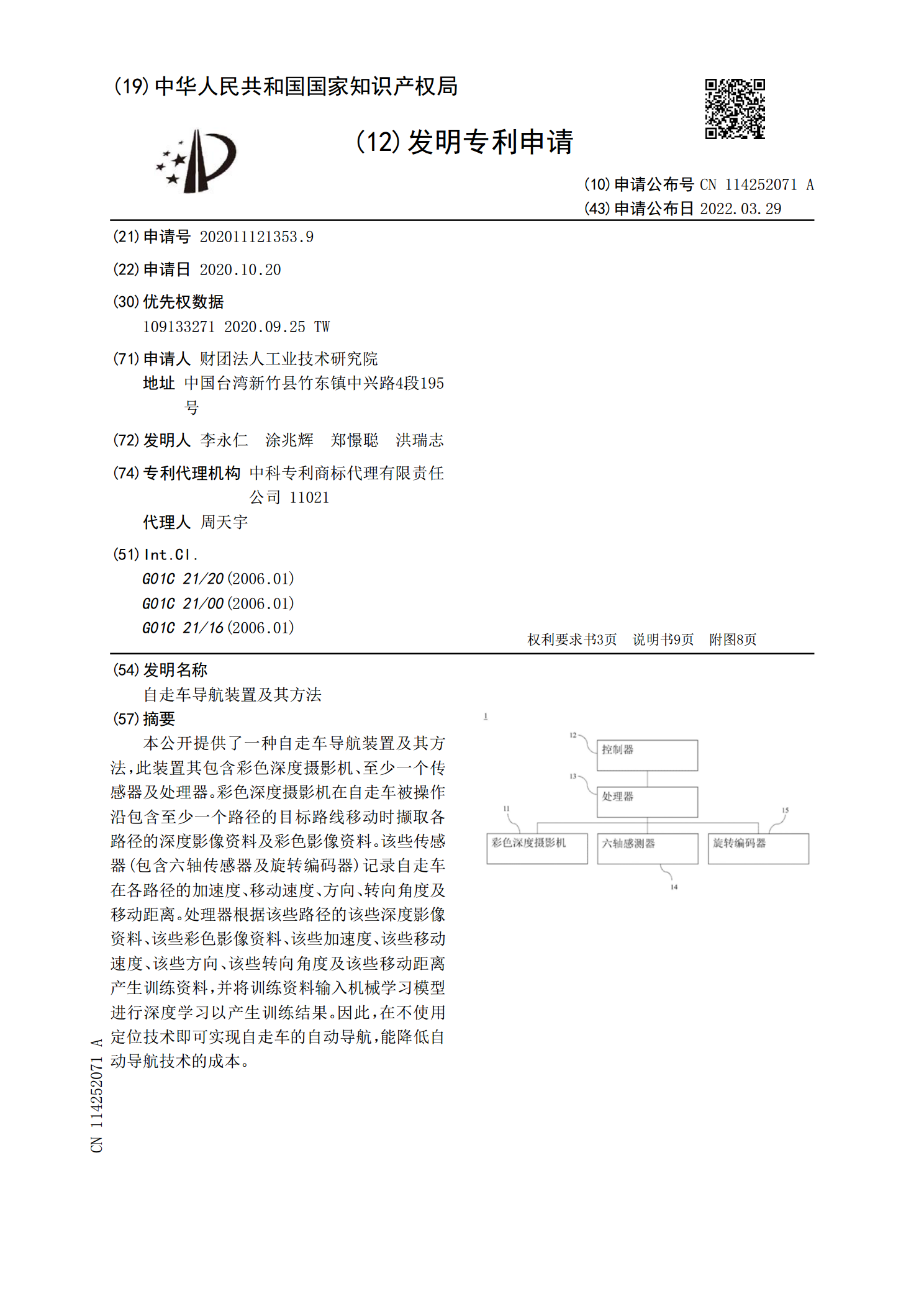
本公开提供了一种自走车导航装置及其方法,此装置其包含彩色深度摄影机、至少一个传感器及处理器。彩色深度摄影机在自走车被操作沿包含至少一个路径的目标路线移动时撷取各路径的深度影像资料及彩色影像资料。该些传感器(包含六轴传感器及旋转编码器)记录自走车在各路径的加速度、移动速度、方向、转向角度及移动距离。处理器根据该些路径的该些深度影像资料、该些彩色影像资料、该些加速度、该些移动速度、该些方向、该些转向角度及该些移动距离产生训练资料,并将训练资料输入机械学习模型进行深度学习以产生训练结果。因此,在不使用定位技术即

自走式电子装置及其控制自走式电子装置行为的方法.pdf
本发明涉及一种自走式电子装置及其控制自走式电子装置行为的方法。该自走式电子装置包括:一轮组、一马达、一马达控制模块、一动态感应模块以及一处理模块;该马达与该轮组相连接,用以驱动该轮组;该马达控制模块与该马达电性连接,用以控制该马达;该动态感应模块用以根据该自走式电子装置所接触的一环境状态检测出一感应信号;该处理模块与该马达控制模块及该动态感应模块电性连接,以接收该感应信号;其中当该感应信号为一移动异常信号时,该处理模块根据该移动异常信号以藉由该马达控制模块控制该马达,并进一步调整该轮组以适应该环境状态。本
导航方法及其装置.pdf
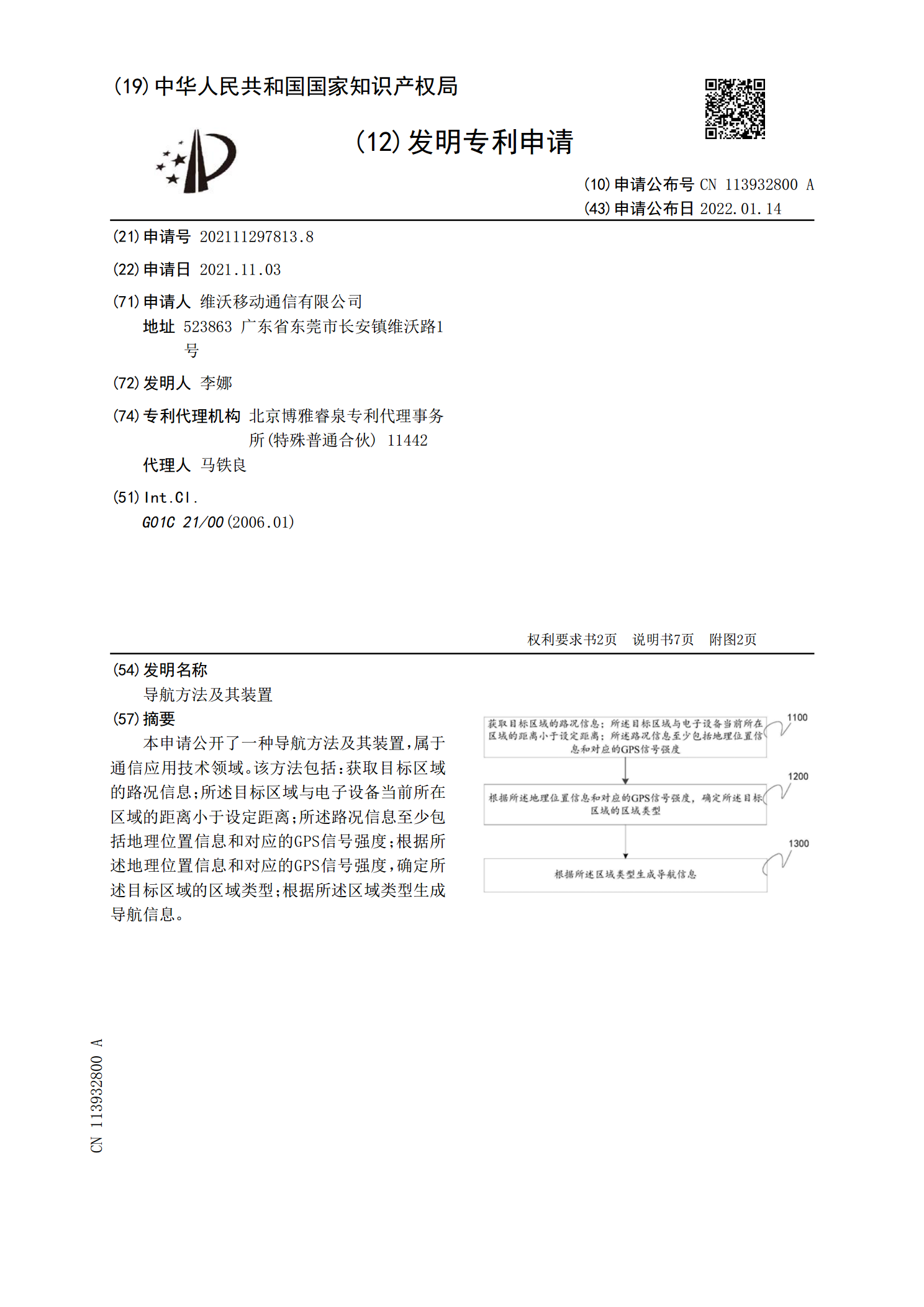
本申请公开了一种导航方法及其装置,属于通信应用技术领域。该方法包括:获取目标区域的路况信息;所述目标区域与电子设备当前所在区域的距离小于设定距离;所述路况信息至少包括地理位置信息和对应的GPS信号强度;根据所述地理位置信息和对应的GPS信号强度,确定所述目标区域的区域类型;根据所述区域类型生成导航信息。

智能导航车及其操控方法.pdf
本发明公开了一种智能导航车及其操控方法,旨在克服现有智能车易发生失稳的问题。该车由信号采集系统、智能导航系统和行驶系统组成。信号采集系统包括CCD图像传感器、光电编码器、加速度传感器、横摆角速度传感器和轮速传感器。CCD图像传感器、光电编码器、加速度传感器、横摆角速度传感器和轮速传感器分别和智能导航系统的单片机电连接。行驶系统包括的制动机构主要由伺服电机、摆臂及制动闸片组成。伺服电机和单片机电连接,伺服电机固定在驱动机构固定架上,伺服电机的输出端与摆臂中水平横臂花键连接,摆臂的两垂直臂的底端铰接制动闸片。
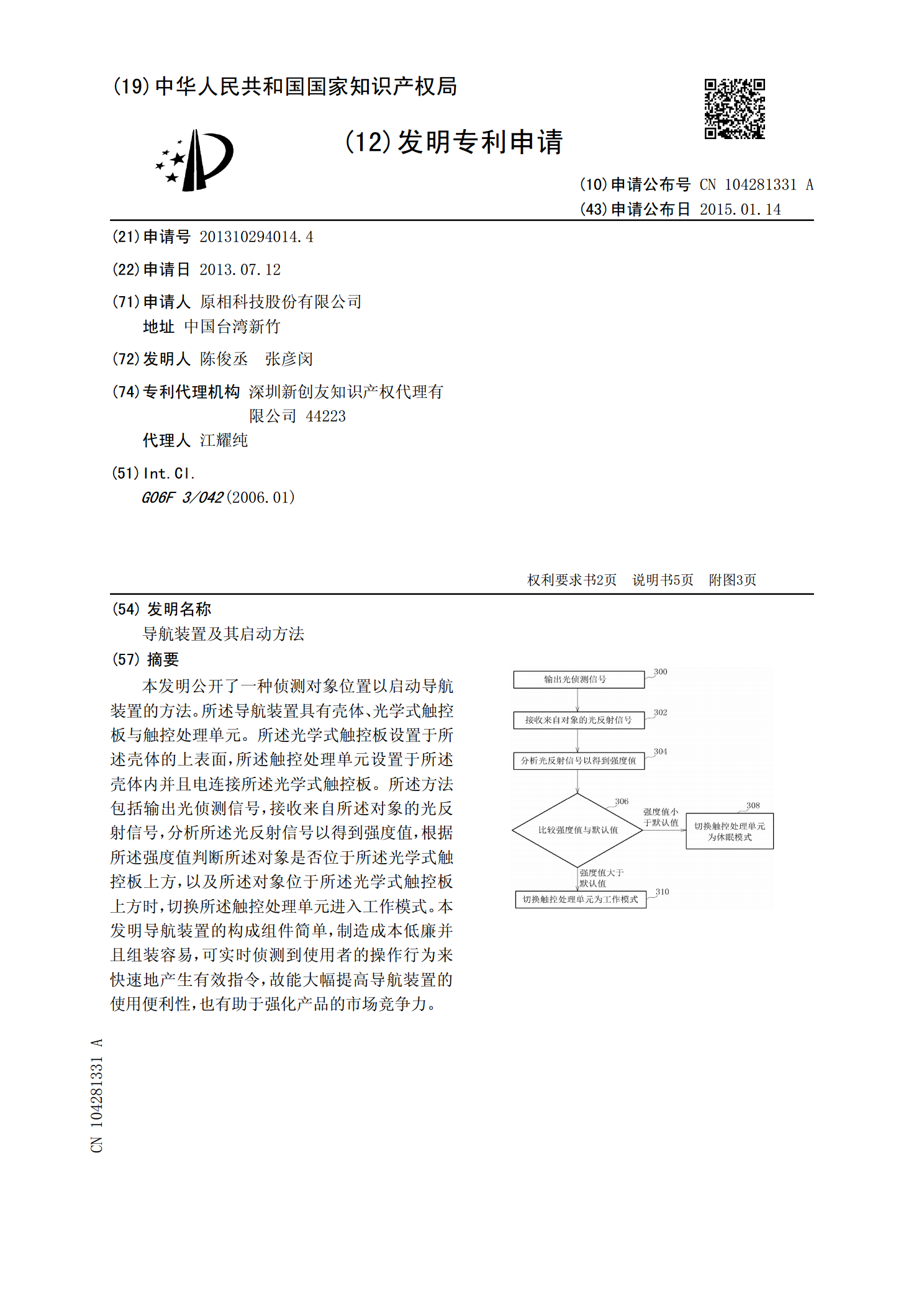
导航装置及其启动方法.pdf
本发明公开了一种侦测对象位置以启动导航装置的方法。所述导航装置具有壳体、光学式触控板与触控处理单元。所述光学式触控板设置于所述壳体的上表面,所述触控处理单元设置于所述壳体内并且电连接所述光学式触控板。所述方法包括输出光侦测信号,接收来自所述对象的光反射信号,分析所述光反射信号以得到强度值,根据所述强度值判断所述对象是否位于所述光学式触控板上方,以及所述对象位于所述光学式触控板上方时,切换所述触控处理单元进入工作模式。本发明导航装置的构成组件简单,制造成本低廉并且组装容易,可实时侦测到使用者的操作行为来快速