
一种连续夹取式机械手.pdf

是笛****加盟

1/10
2/10
3/10

4/10
5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种连续夹取式机械手.pdf
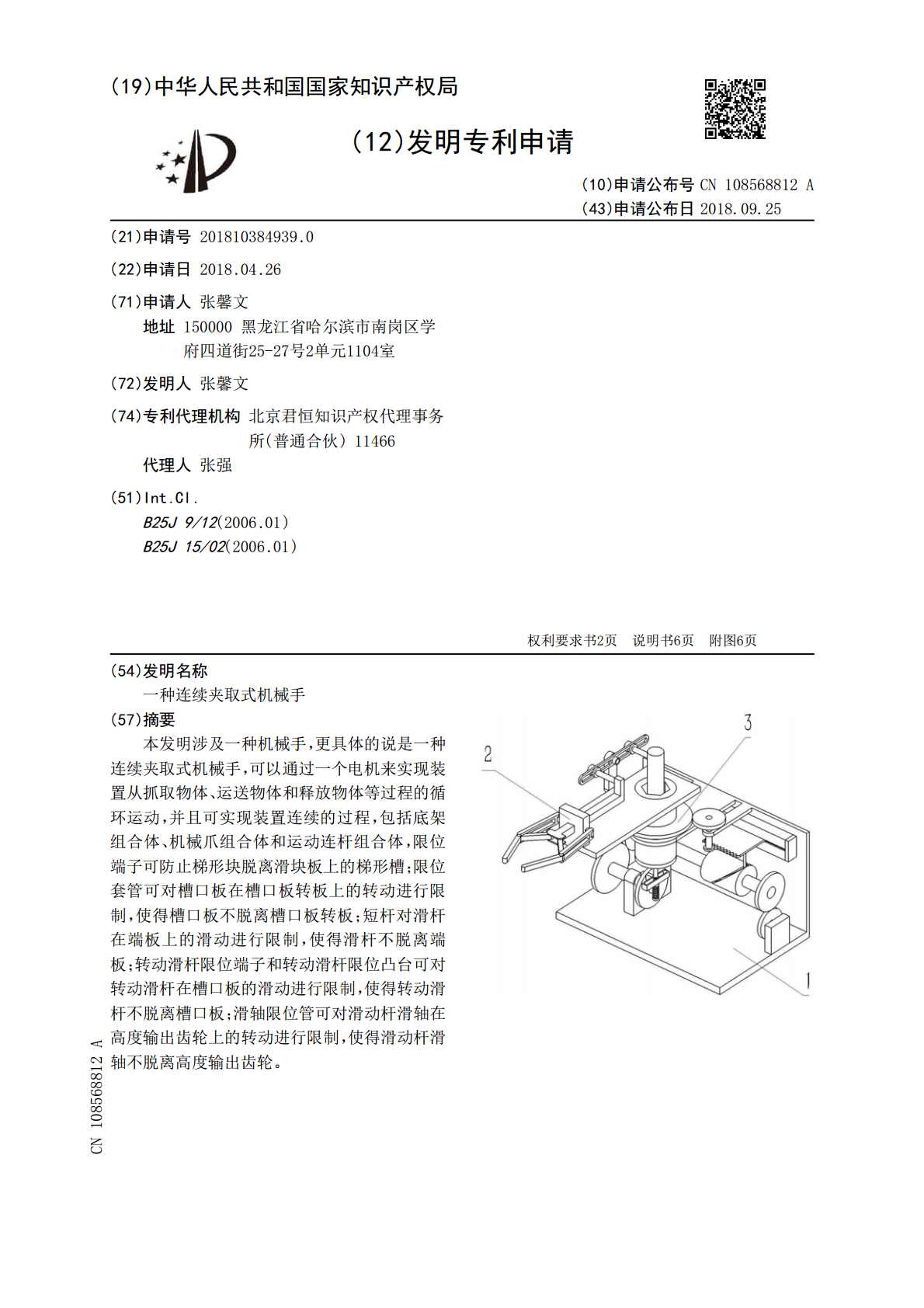
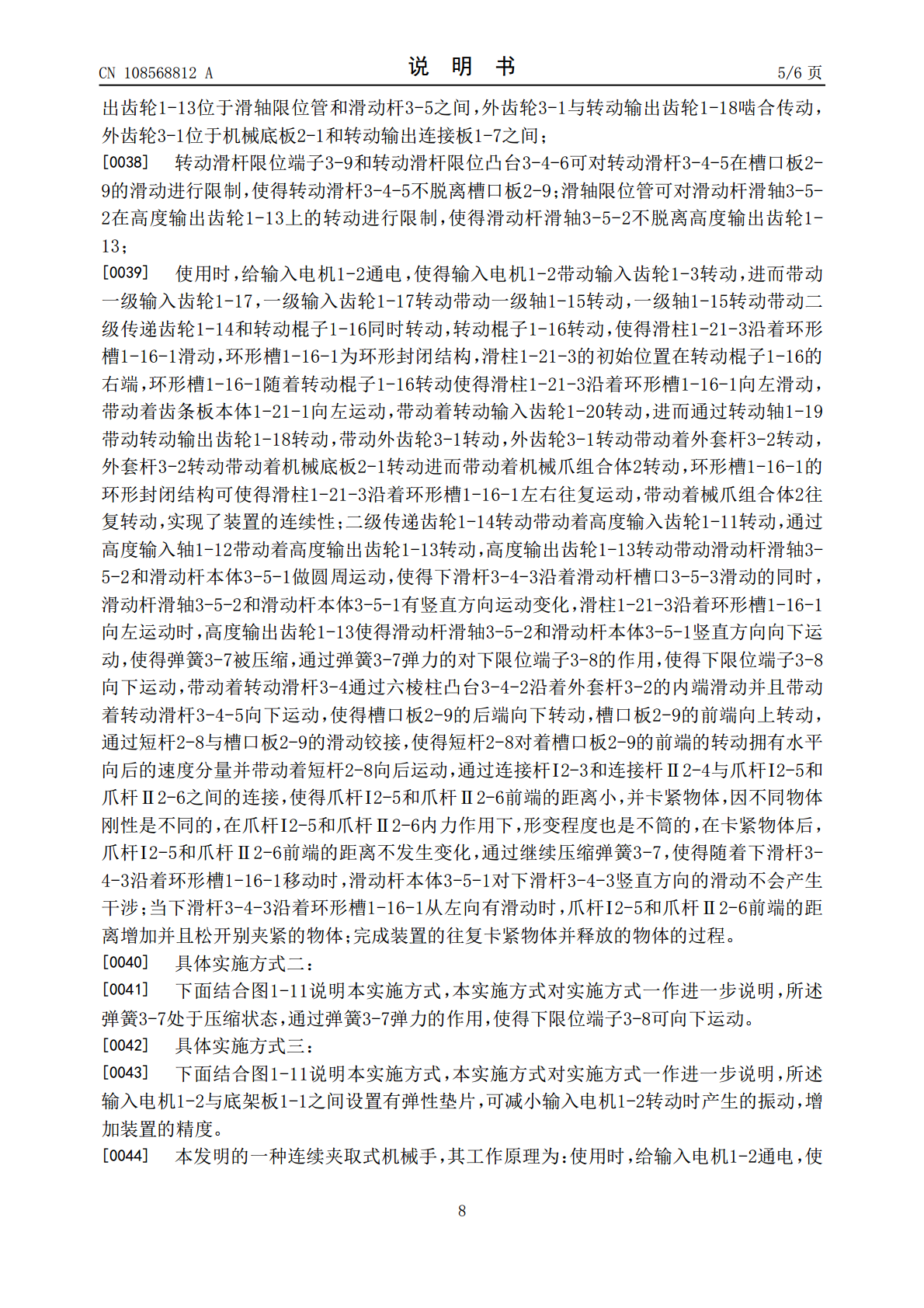
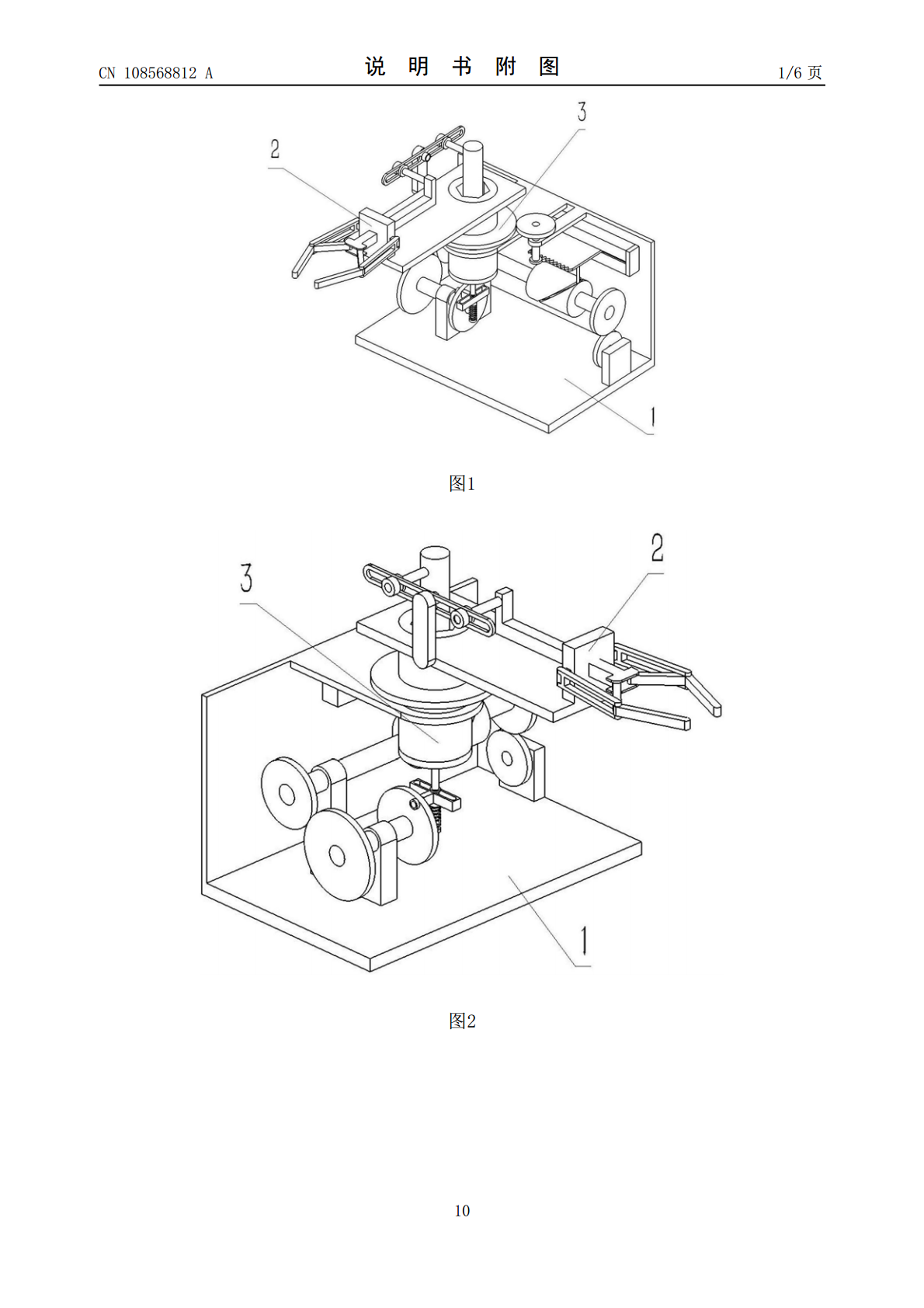
本发明涉及一种机械手,更具体的说是一种连续夹取式机械手,可以通过一个电机来实现装置从抓取物体、运送物体和释放物体等过程的循环运动,并且可实现装置连续的过程,包括底架组合体、机械爪组合体和运动连杆组合体,限位端子可防止梯形块脱离滑块板上的梯形槽;限位套管可对槽口板在槽口板转板上的转动进行限制,使得槽口板不脱离槽口板转板;短杆对滑杆在端板上的滑动进行限制,使得滑杆不脱离端板;转动滑杆限位端子和转动滑杆限位凸台可对转动滑杆在槽口板的滑动进行限制,使得转动滑杆不脱离槽口板;滑轴限位管可对滑动杆滑轴在高度输出齿轮上
一种连续夹取式机械手.pdf
本发明涉及一种机械手,更具体的说是一种连续夹取式机械手,可以通过一个电机来实现装置从抓取物体、运送物体和释放物体等过程的循环运动,并且可实现装置连续的过程,包括底架组合体、机械爪组合体和运动连杆组合体,限位端子可防止梯形块脱离滑块板上的梯形槽;限位套管可对槽口板在槽口板转板上的转动进行限制,使得槽口板不脱离槽口板转板;短杆对滑杆在端板上的滑动进行限制,使得滑杆不脱离端板;转动滑杆限位端子和转动滑杆限位凸台可对转动滑杆在槽口板的滑动进行限制,使得转动滑杆不脱离槽口板;滑轴限位管可对滑动杆滑轴在高度输出齿轮上
夹取式机械手.pdf
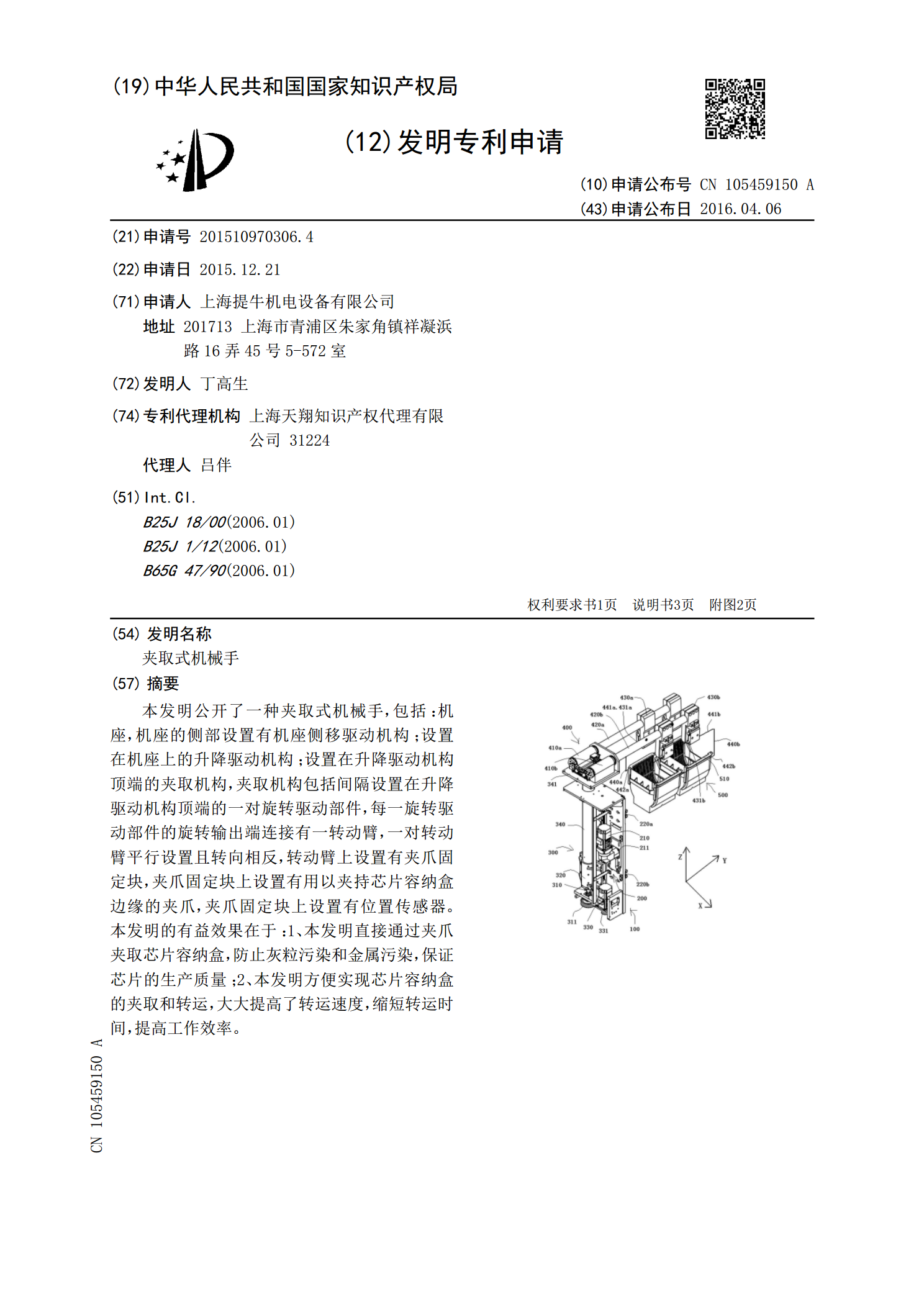
本发明公开了一种夹取式机械手,包括:机座,机座的侧部设置有机座侧移驱动机构;设置在机座上的升降驱动机构;设置在升降驱动机构顶端的夹取机构,夹取机构包括间隔设置在升降驱动机构顶端的一对旋转驱动部件,每一旋转驱动部件的旋转输出端连接有一转动臂,一对转动臂平行设置且转向相反,转动臂上设置有夹爪固定块,夹爪固定块上设置有用以夹持芯片容纳盒边缘的夹爪,夹爪固定块上设置有位置传感器。本发明的有益效果在于:1、本发明直接通过夹爪夹取芯片容纳盒,防止灰粒污染和金属污染,保证芯片的生产质量;2、本发明方便实现芯片容纳盒的夹
一种夹取式家禽自动取内脏机械手.pdf
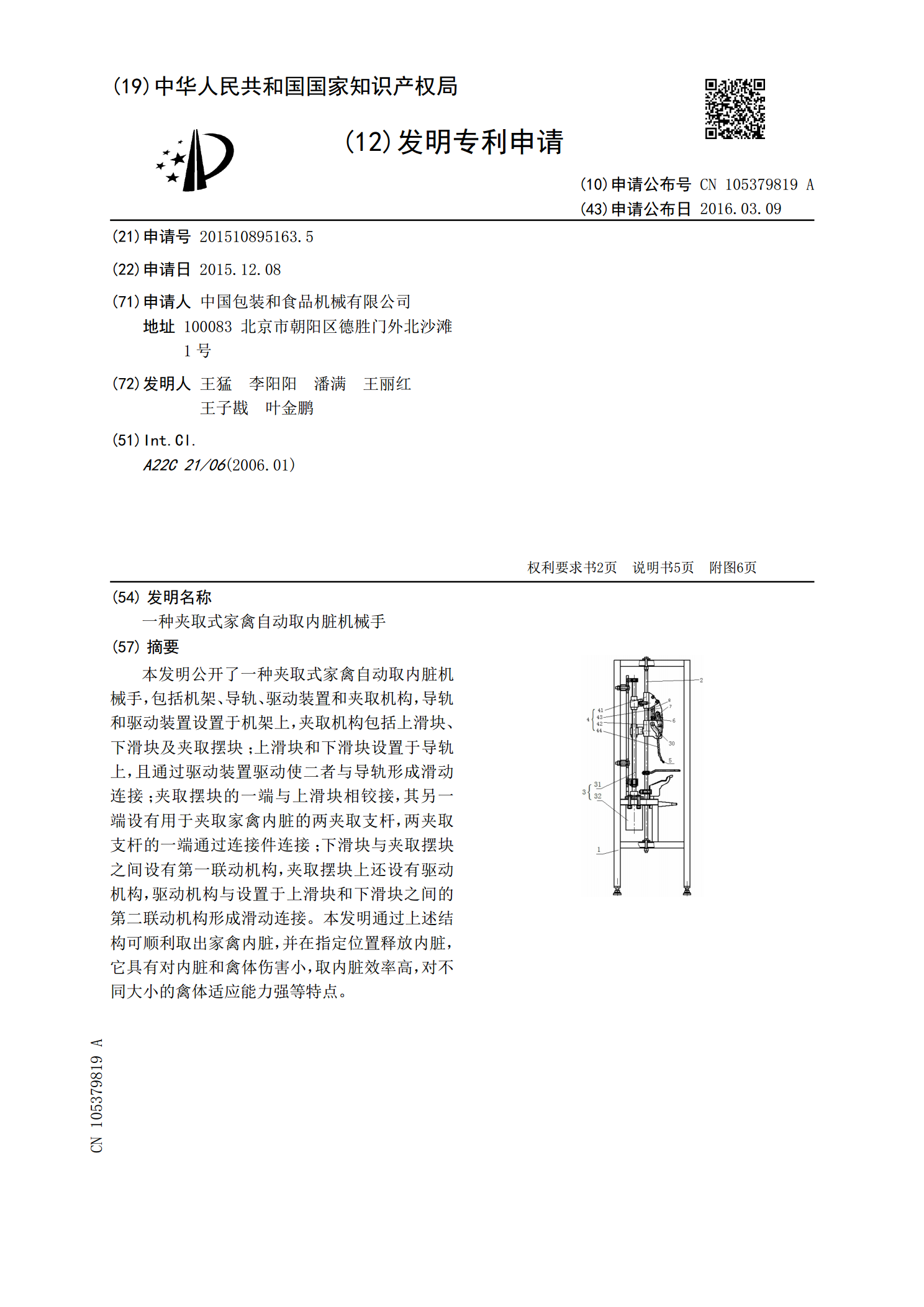
本发明公开了一种夹取式家禽自动取内脏机械手,包括机架、导轨、驱动装置和夹取机构,导轨和驱动装置设置于机架上,夹取机构包括上滑块、下滑块及夹取摆块;上滑块和下滑块设置于导轨上,且通过驱动装置驱动使二者与导轨形成滑动连接;夹取摆块的一端与上滑块相铰接,其另一端设有用于夹取家禽内脏的两夹取支杆,两夹取支杆的一端通过连接件连接;下滑块与夹取摆块之间设有第一联动机构,夹取摆块上还设有驱动机构,驱动机构与设置于上滑块和下滑块之间的第二联动机构形成滑动连接。本发明通过上述结构可顺利取出家禽内脏,并在指定位置释放内脏,它
一种平行夹取的机械手.pdf
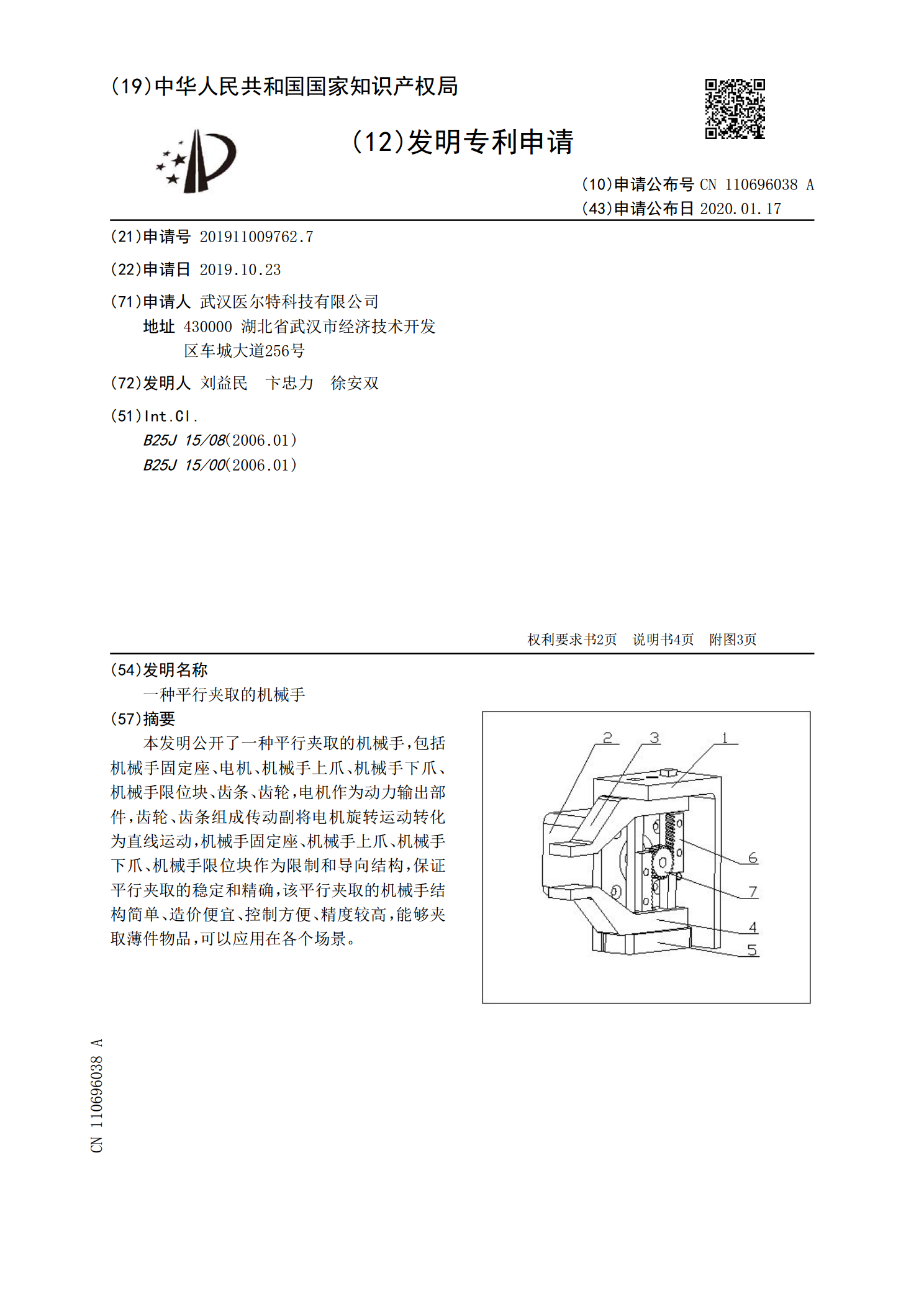
本发明公开了一种平行夹取的机械手,包括机械手固定座、电机、机械手上爪、机械手下爪、机械手限位块、齿条、齿轮,电机作为动力输出部件,齿轮、齿条组成传动副将电机旋转运动转化为直线运动,机械手固定座、机械手上爪、机械手下爪、机械手限位块作为限制和导向结构,保证平行夹取的稳定和精确,该平行夹取的机械手结构简单、造价便宜、控制方便、精度较高,能够夹取薄件物品,可以应用在各个场景。