
一种仓储用智能运输机械臂.pdf

元容****少女


1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种仓储用智能运输机械臂.pdf
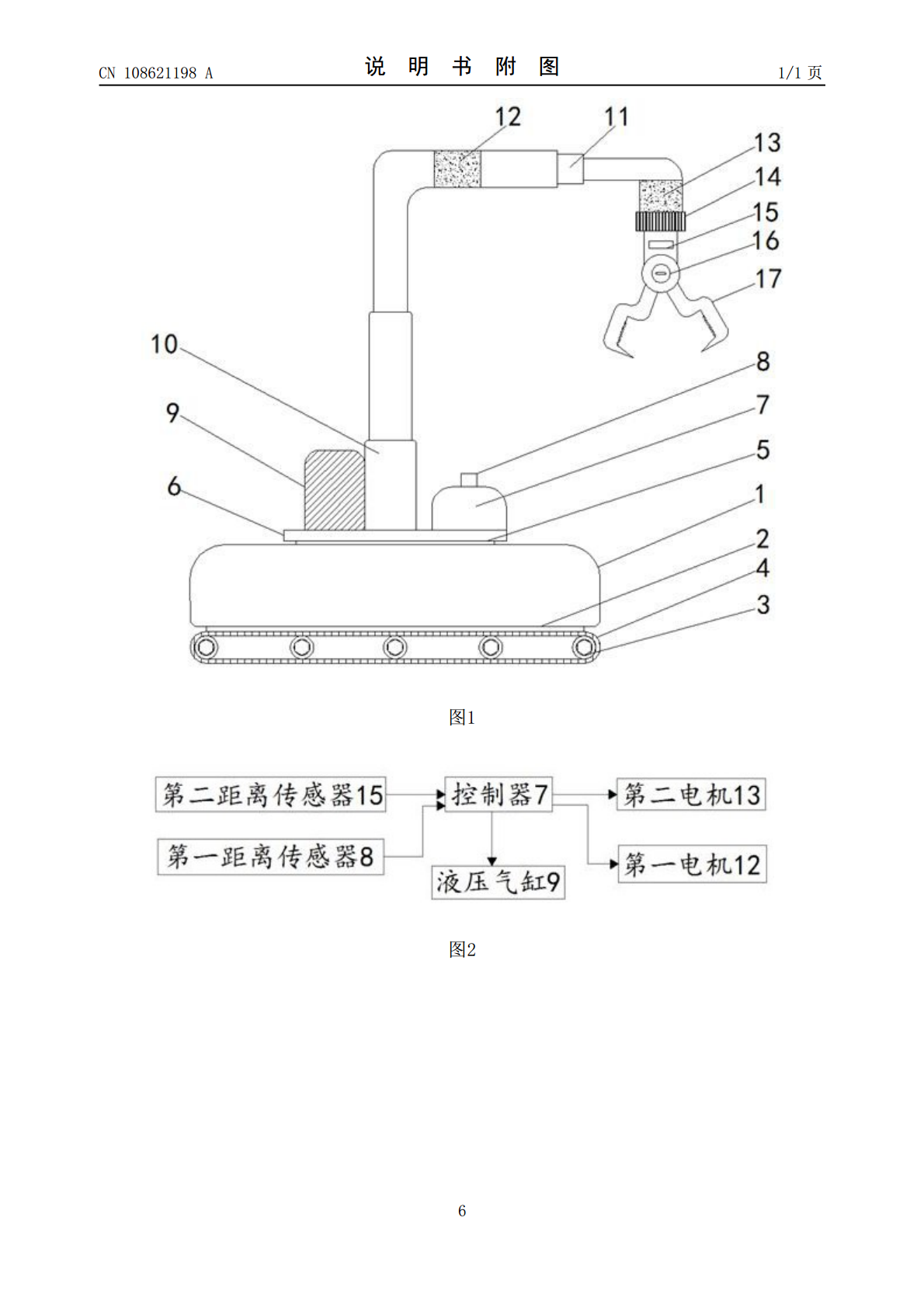
本发明涉及机械臂技术领域,且公开了一种仓储用智能运输机械臂,包括基座,所述基座的底部固定连接有支撑脚,所述支撑脚的底端活动连接有滚轮,所述基座的顶部安装有轴承,所述轴承的顶部固定连接有支撑板,所述支撑板的顶部且位于液压气缸的右侧固定连接有升降杆,所述升降杆的顶端固定连接有伸缩杆,所述固定环的底部活动安装有夹持钳。该仓储用智能运输机械臂,通过两个距离传感器来传导距离信号给控制器,控制器控制液压气缸来控制升降杆的高度,控制器控制第一电机控制伸缩杆的长度,控制器控制第二电机控制夹持钳夹取货物,控制轴承控制整体的
一种运输用机械臂.pdf
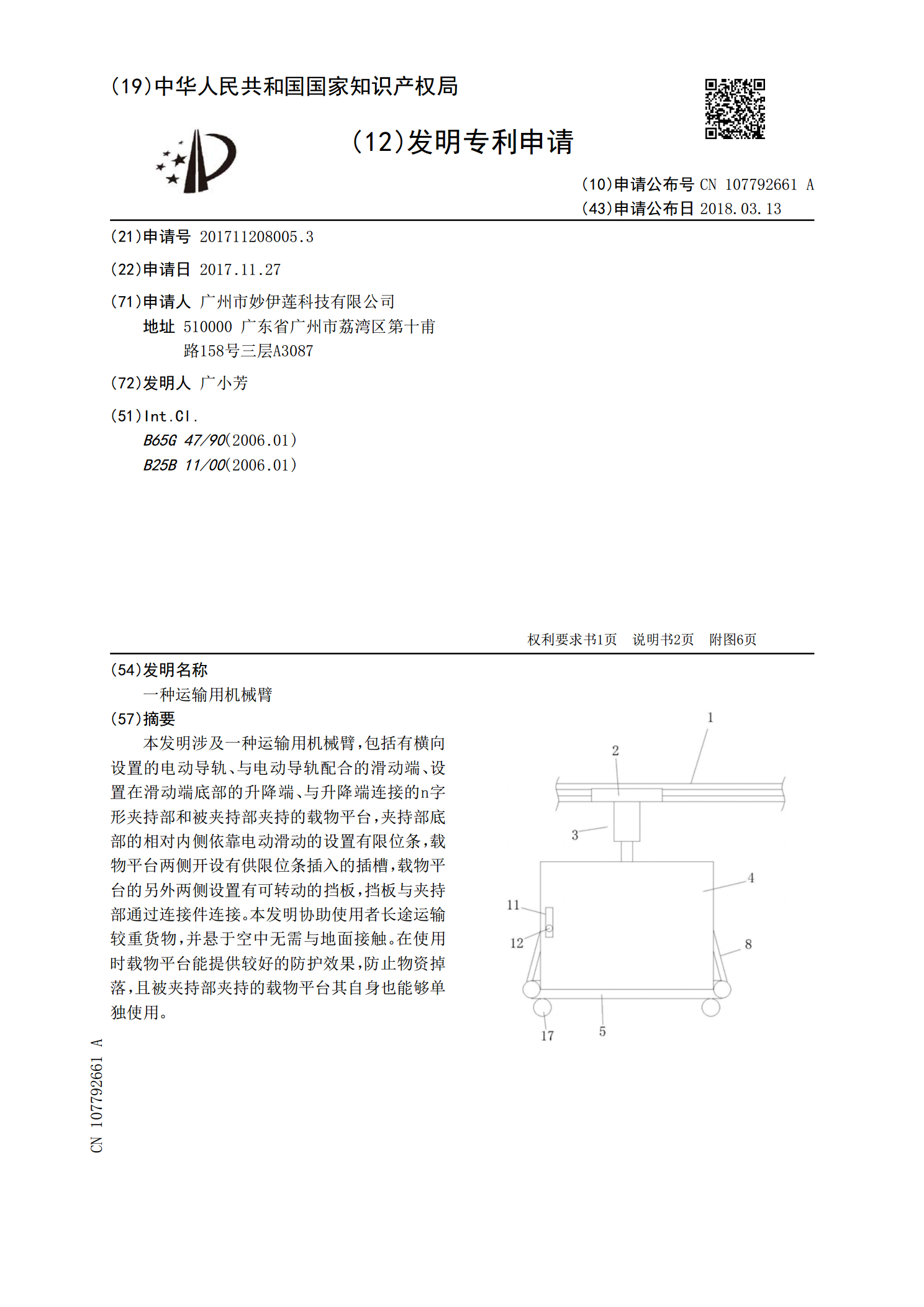
本发明涉及一种运输用机械臂,包括有横向设置的电动导轨、与电动导轨配合的滑动端、设置在滑动端底部的升降端、与升降端连接的n字形夹持部和被夹持部夹持的载物平台,夹持部底部的相对内侧依靠电动滑动的设置有限位条,载物平台两侧开设有供限位条插入的插槽,载物平台的另外两侧设置有可转动的挡板,挡板与夹持部通过连接件连接。本发明协助使用者长途运输较重货物,并悬于空中无需与地面接触。在使用时载物平台能提供较好的防护效果,防止物资掉落,且被夹持部夹持的载物平台其自身也能够单独使用。
一种运输用辅助机械臂.pdf
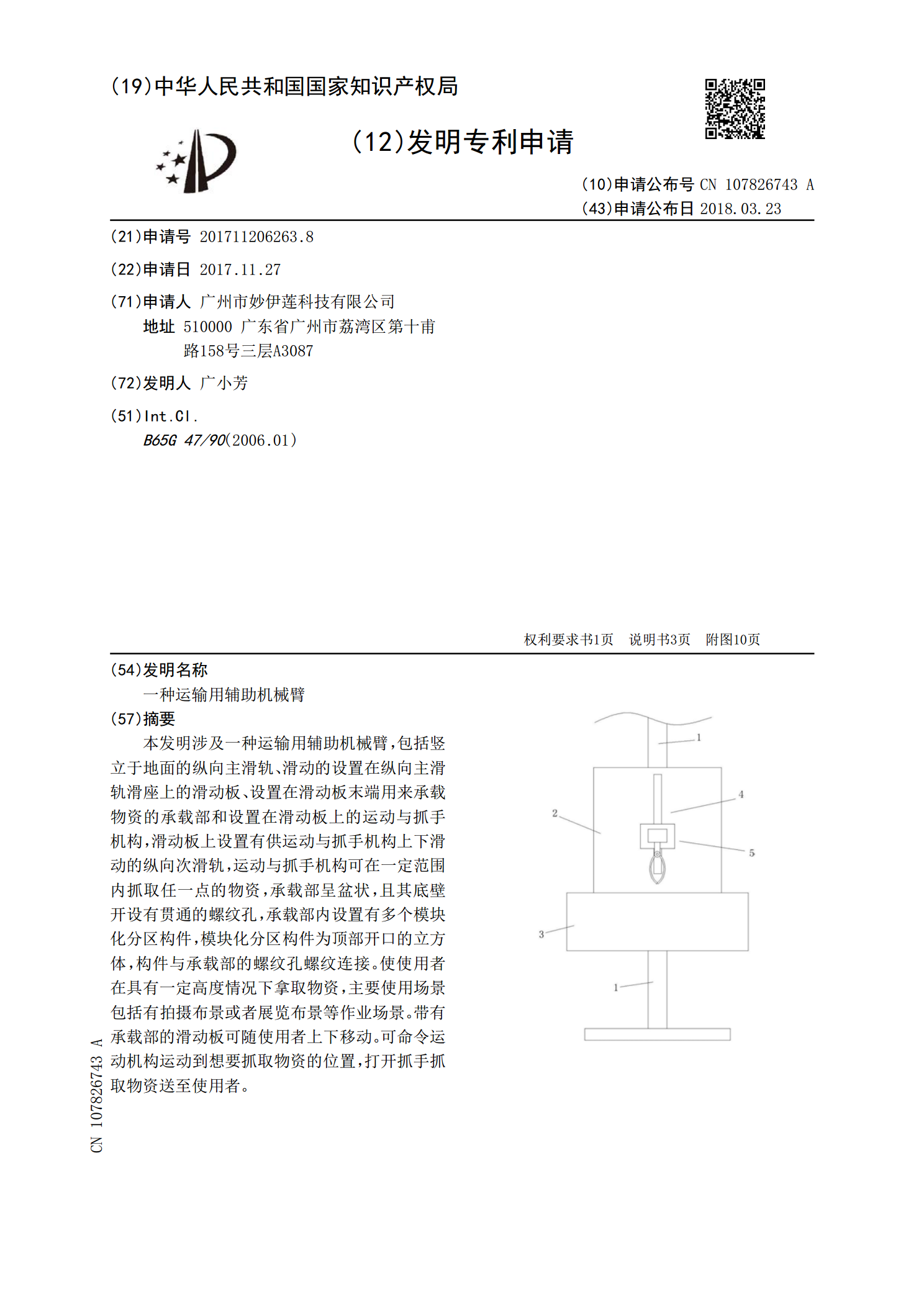
本发明涉及一种运输用辅助机械臂,包括竖立于地面的纵向主滑轨、滑动的设置在纵向主滑轨滑座上的滑动板、设置在滑动板末端用来承载物资的承载部和设置在滑动板上的运动与抓手机构,滑动板上设置有供运动与抓手机构上下滑动的纵向次滑轨,运动与抓手机构可在一定范围内抓取任一点的物资,承载部呈盆状,且其底壁开设有贯通的螺纹孔,承载部内设置有多个模块化分区构件,模块化分区构件为顶部开口的立方体,构件与承载部的螺纹孔螺纹连接。使使用者在具有一定高度情况下拿取物资,主要使用场景包括有拍摄布景或者展览布景等作业场景。带有承载部的滑动
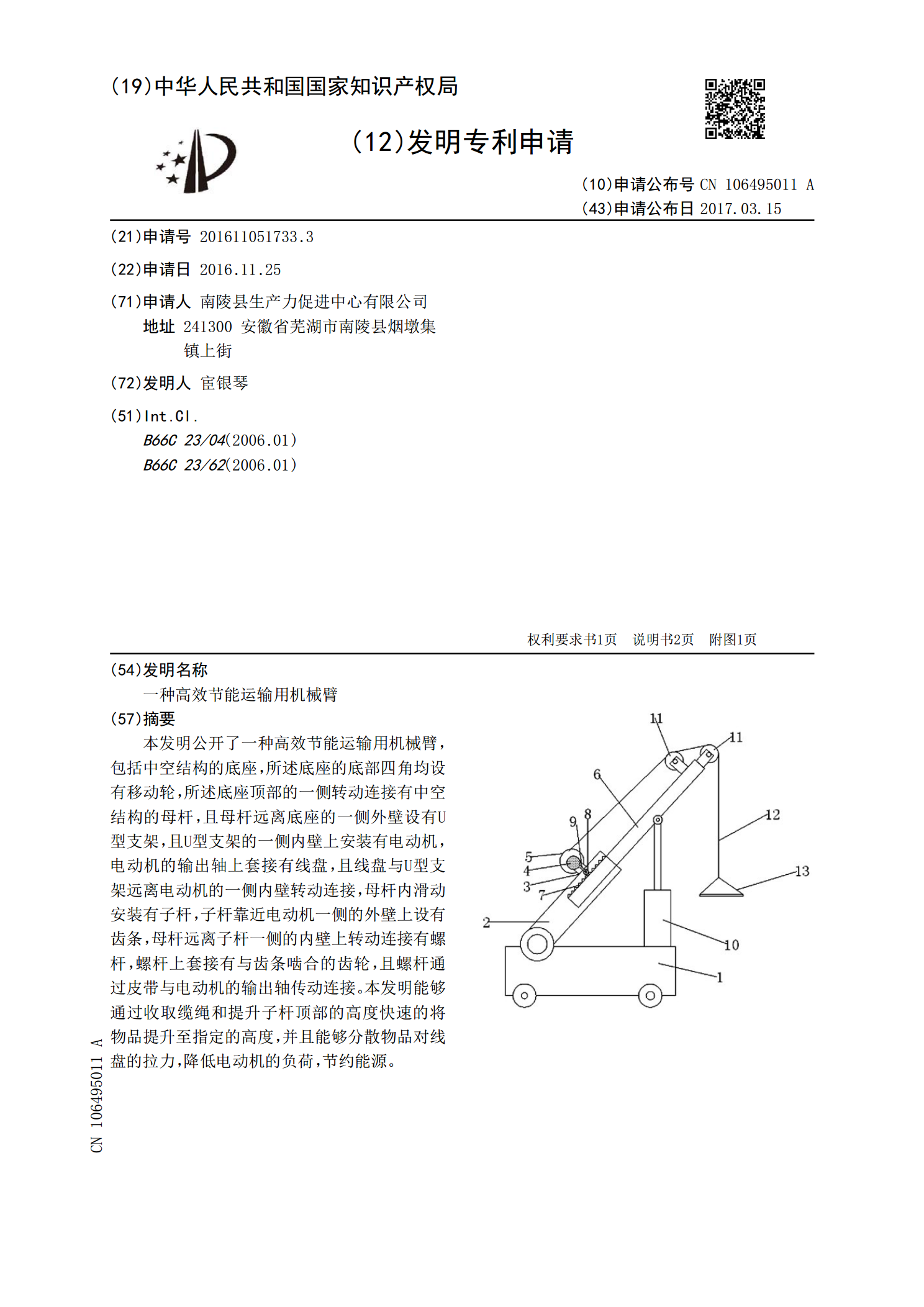
一种高效节能运输用机械臂.pdf
本发明公开了一种高效节能运输用机械臂,包括中空结构的底座,所述底座的底部四角均设有移动轮,所述底座顶部的一侧转动连接有中空结构的母杆,且母杆远离底座的一侧外壁设有U型支架,且U型支架的一侧内壁上安装有电动机,电动机的输出轴上套接有线盘,且线盘与U型支架远离电动机的一侧内壁转动连接,母杆内滑动安装有子杆,子杆靠近电动机一侧的外壁上设有齿条,母杆远离子杆一侧的内壁上转动连接有螺杆,螺杆上套接有与齿条啮合的齿轮,且螺杆通过皮带与电动机的输出轴传动连接。本发明能够通过收取缆绳和提升子杆顶部的高度快速的将物品提升至
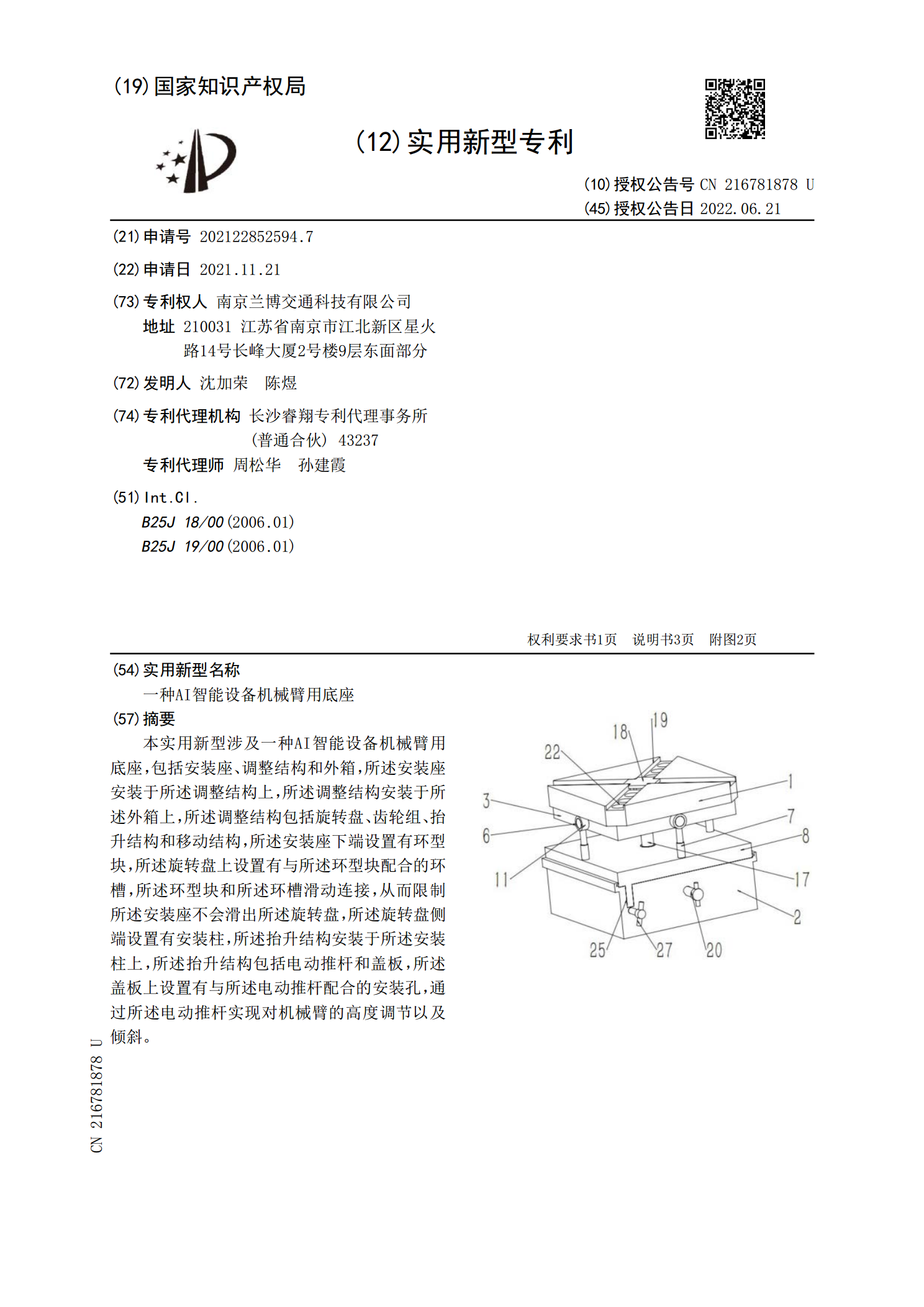
一种AI智能设备机械臂用底座.pdf
本实用新型涉及一种AI智能设备机械臂用底座,包括安装座、调整结构和外箱,所述安装座安装于所述调整结构上,所述调整结构安装于所述外箱上,所述调整结构包括旋转盘、齿轮组、抬升结构和移动结构,所述安装座下端设置有环型块,所述旋转盘上设置有与所述环型块配合的环槽,所述环型块和所述环槽滑动连接,从而限制所述安装座不会滑出所述旋转盘,所述旋转盘侧端设置有安装柱,所述抬升结构安装于所述安装柱上,所述抬升结构包括电动推杆和盖板,所述盖板上设置有与所述电动推杆配合的安装孔,通过所述电动推杆实现对机械臂的高度调节以及倾斜。