
电马达,齿轮马达,擦拭系统及相关控制方法.pdf

长春****主a


1/10
2/10

3/10

4/10
5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
电马达,齿轮马达,擦拭系统及相关控制方法.pdf
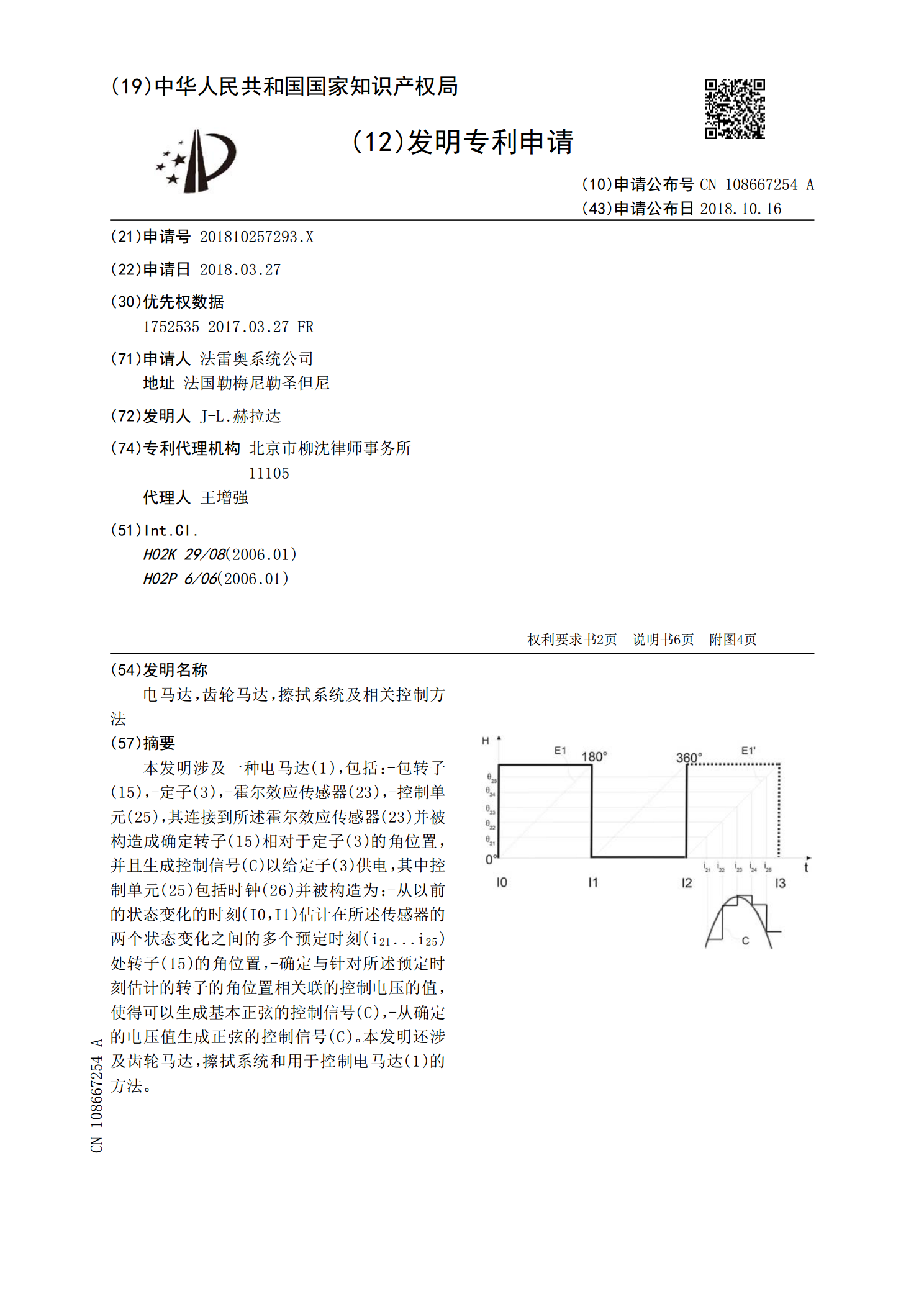
本发明涉及一种电马达(1),包括:‑包转子(15),‑定子(3),‑霍尔效应传感器(23),‑控制单元(25),其连接到所述霍尔效应传感器(23)并被构造成确定转子(15)相对于定子(3)的角位置,并且生成控制信号(C)以给定子(3)供电,其中控制单元(25)包括时钟(26)并被构造为:‑从以前的状态变化的时刻(I0,I1)估计在所述传感器的两个状态变化之间的多个预定时刻(i
用于机动车辆擦拭器系统的齿轮马达.pdf
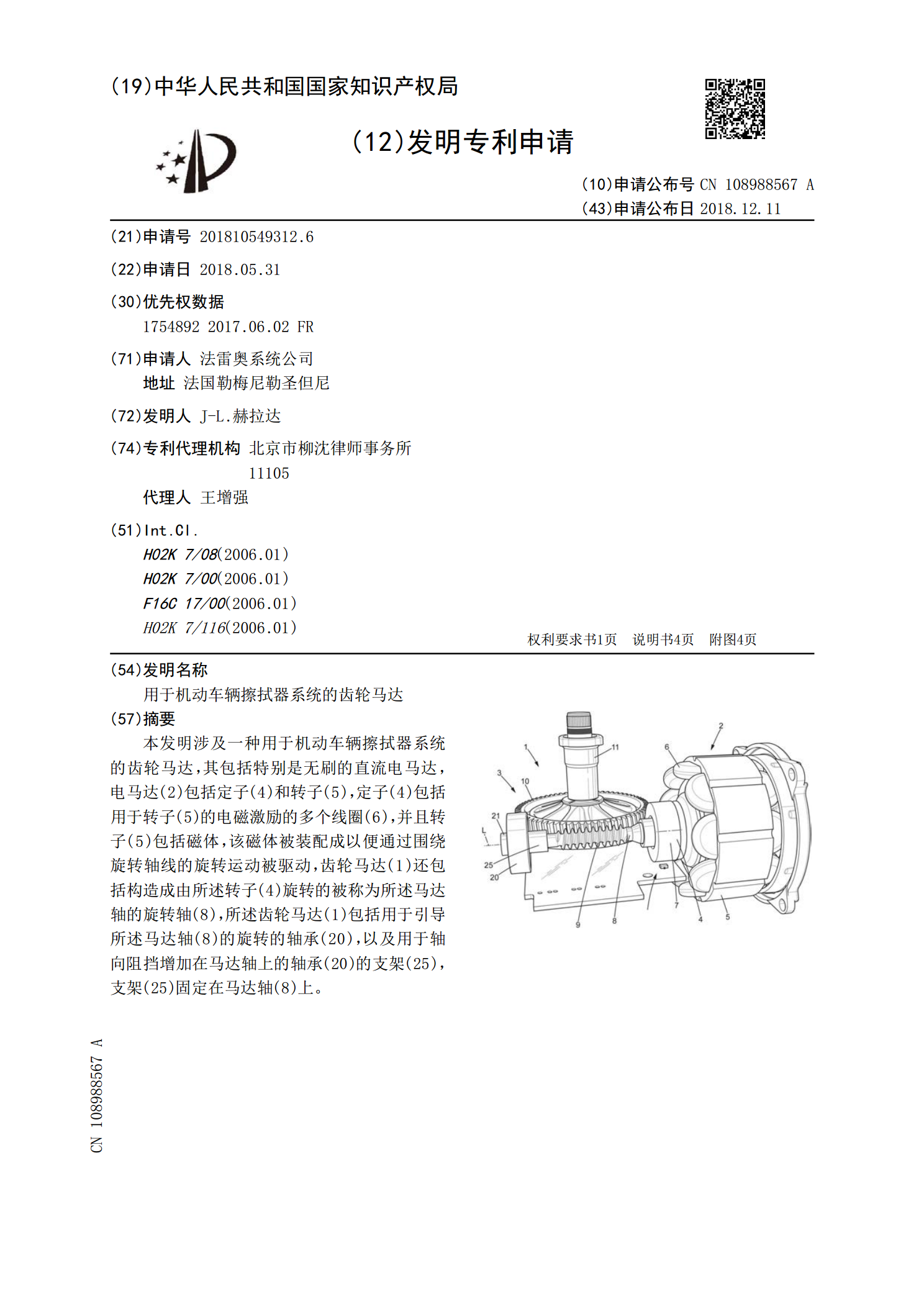
本发明涉及一种用于机动车辆擦拭器系统的齿轮马达,其包括特别是无刷的直流电马达,电马达(2)包括定子(4)和转子(5),定子(4)包括用于转子(5)的电磁激励的多个线圈(6),并且转子(5)包括磁体,该磁体被装配成以便通过围绕旋转轴线的旋转运动被驱动,齿轮马达(1)还包括构造成由所述转子(4)旋转的被称为所述马达轴的旋转轴(8),所述齿轮马达(1)包括用于引导所述马达轴(8)的旋转的轴承(20),以及用于轴向阻挡增加在马达轴上的轴承(20)的支架(25),支架(25)固定在马达轴(8)上。
组装齿轮马达的方法及设备、以及齿轮马达.pdf
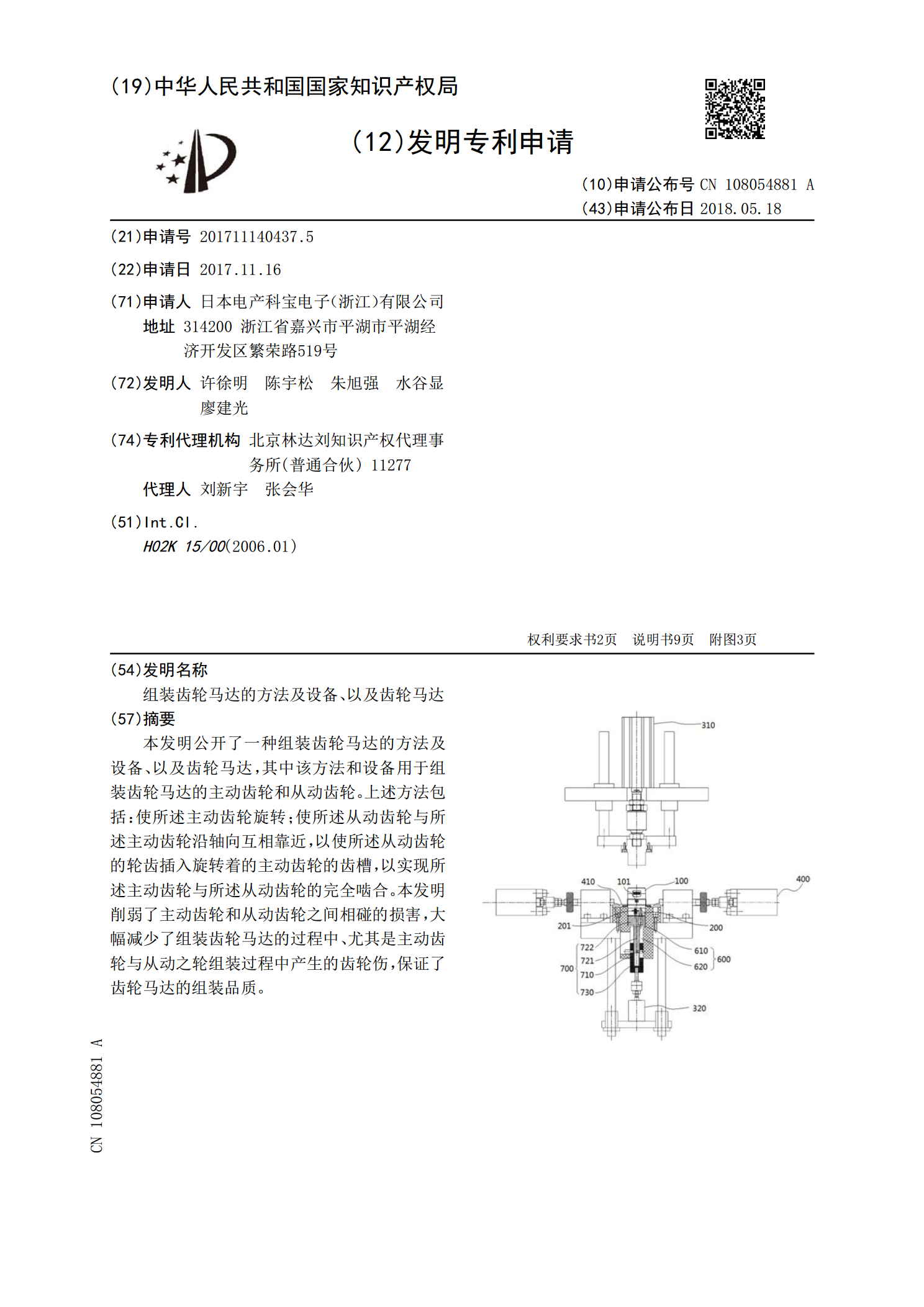
本发明公开了一种组装齿轮马达的方法及设备、以及齿轮马达,其中该方法和设备用于组装齿轮马达的主动齿轮和从动齿轮。上述方法包括:使所述主动齿轮旋转;使所述从动齿轮与所述主动齿轮沿轴向互相靠近,以使所述从动齿轮的轮齿插入旋转着的主动齿轮的齿槽,以实现所述主动齿轮与所述从动齿轮的完全啮合。本发明削弱了主动齿轮和从动齿轮之间相碰的损害,大幅减少了组装齿轮马达的过程中、尤其是主动齿轮与从动之轮组装过程中产生的齿轮伤,保证了齿轮马达的组装品质。

用于风挡玻璃擦拭器的齿轮马达单元.pdf
本发明涉及一种齿轮马达单元(1),其用于机动车辆擦拭器系统,所述齿轮马达单元包括:‑电马达(3),其容置在壳体(4)中,‑减速齿轮机构(5),其连接到电马达(3),‑安装件(9),其接收减速齿轮机构(5),‑固定板(11)和/或封闭板(110),其一方面意于被固定在安装件(9)上,另一方面意于被固定在车辆的结构元件上,其中,在下述元件中:‑所述固定板(11),‑所述封闭板(110),‑所述安装件(9),和‑所述壳体(4),至少一个元件由叠层复合材料(39)制成,所述叠层复合材料包括至少两个材料层(C1、C

带马达的齿轮系统.pdf
一种与马达连接的齿轮系统,马达具有马达轴、马达壳体以及马达凸缘。马达壳体具有第1贯通孔,马达凸缘具有第2贯通孔和第3贯通孔。齿轮系统具有壳体和固定轴。壳体具有罩部件,该罩部件具有第4贯通孔。固定轴的一部分被固定,并且固定轴通过第4贯通孔而使轴向上侧的端部位于罩部件的轴向上侧。在马达轴的轴向下侧的端部安装有第1齿轮。在固定轴的轴向上侧的端部安装有第2齿轮,该第2齿轮与第1齿轮啮合,能够相对于固定轴进行旋转。在固定轴的轴向上侧的端部还直接或间接地安装有枢轴,该枢轴的至少一部分固定在马达凸缘的第3贯通孔内。