
一种智能工业机器人.pdf

鸿朗****ka

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种智能工业机器人.pdf
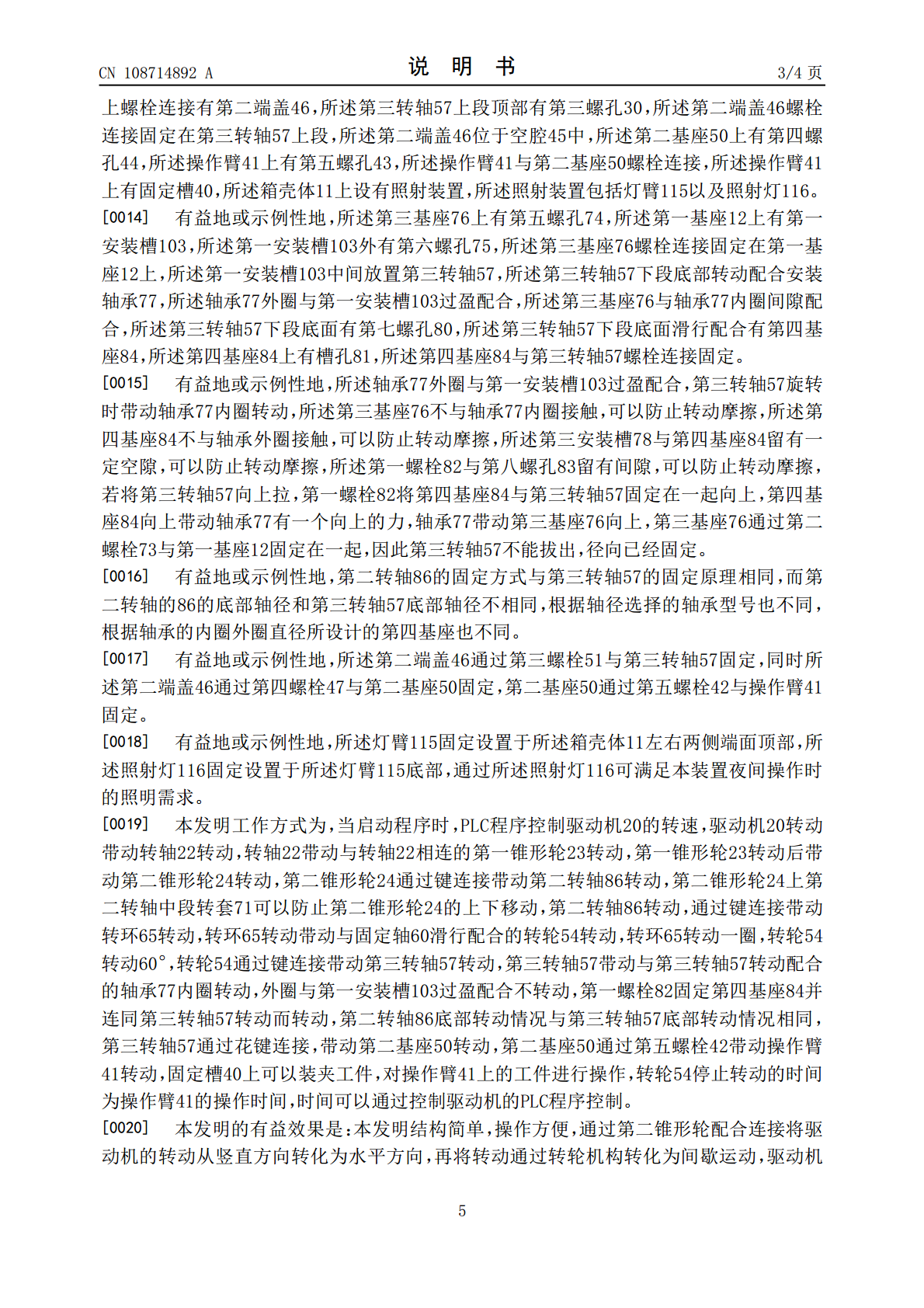
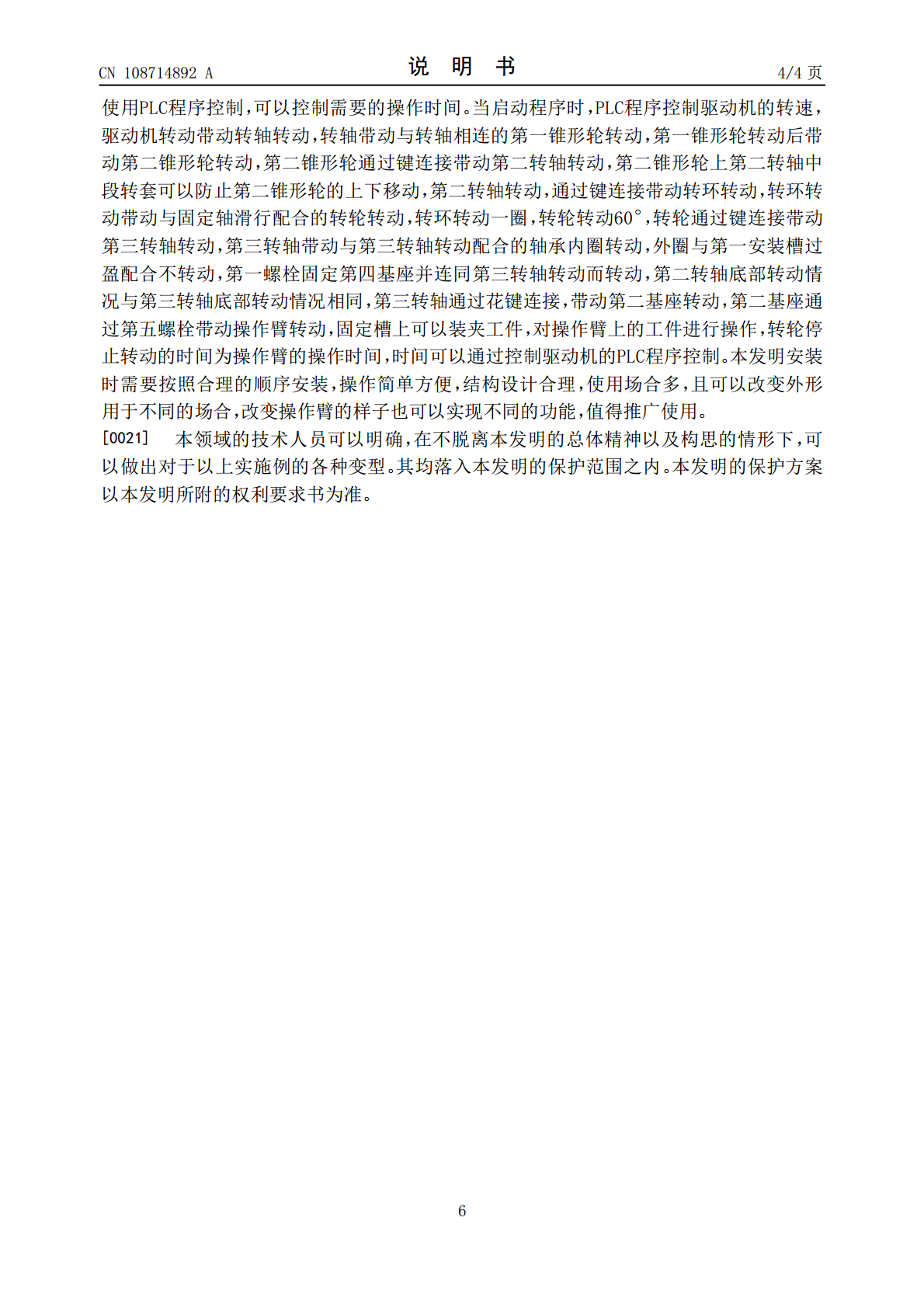
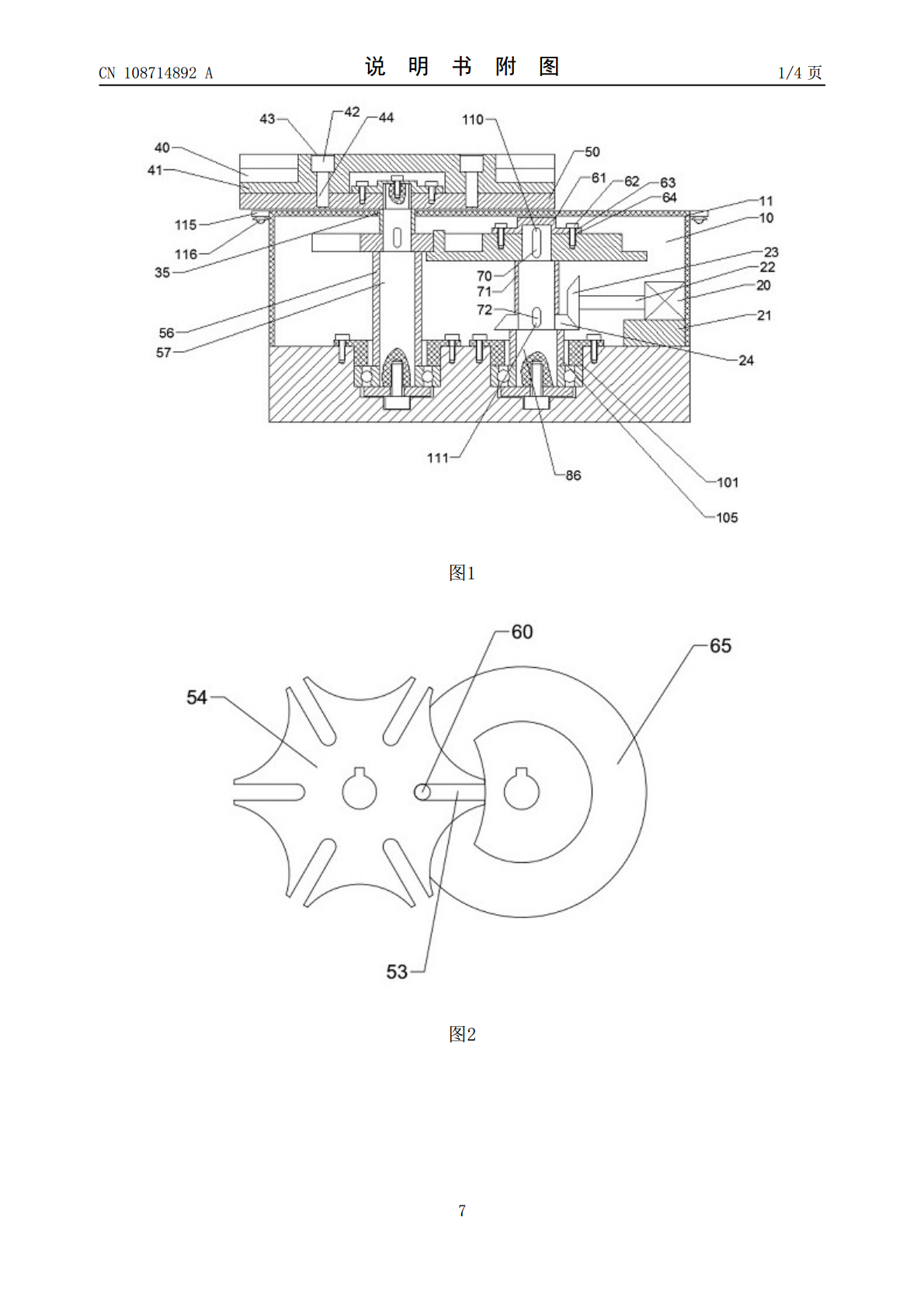
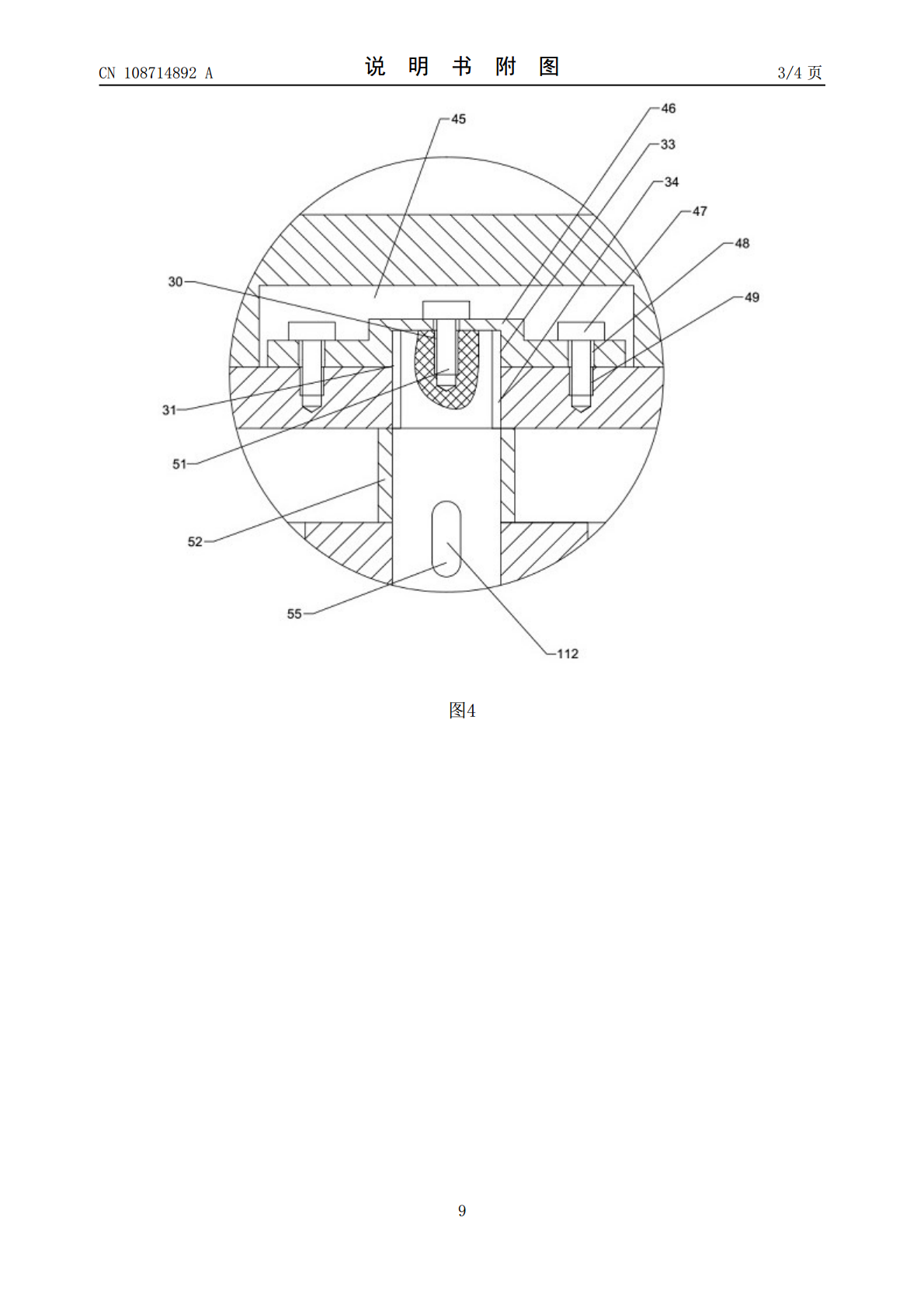
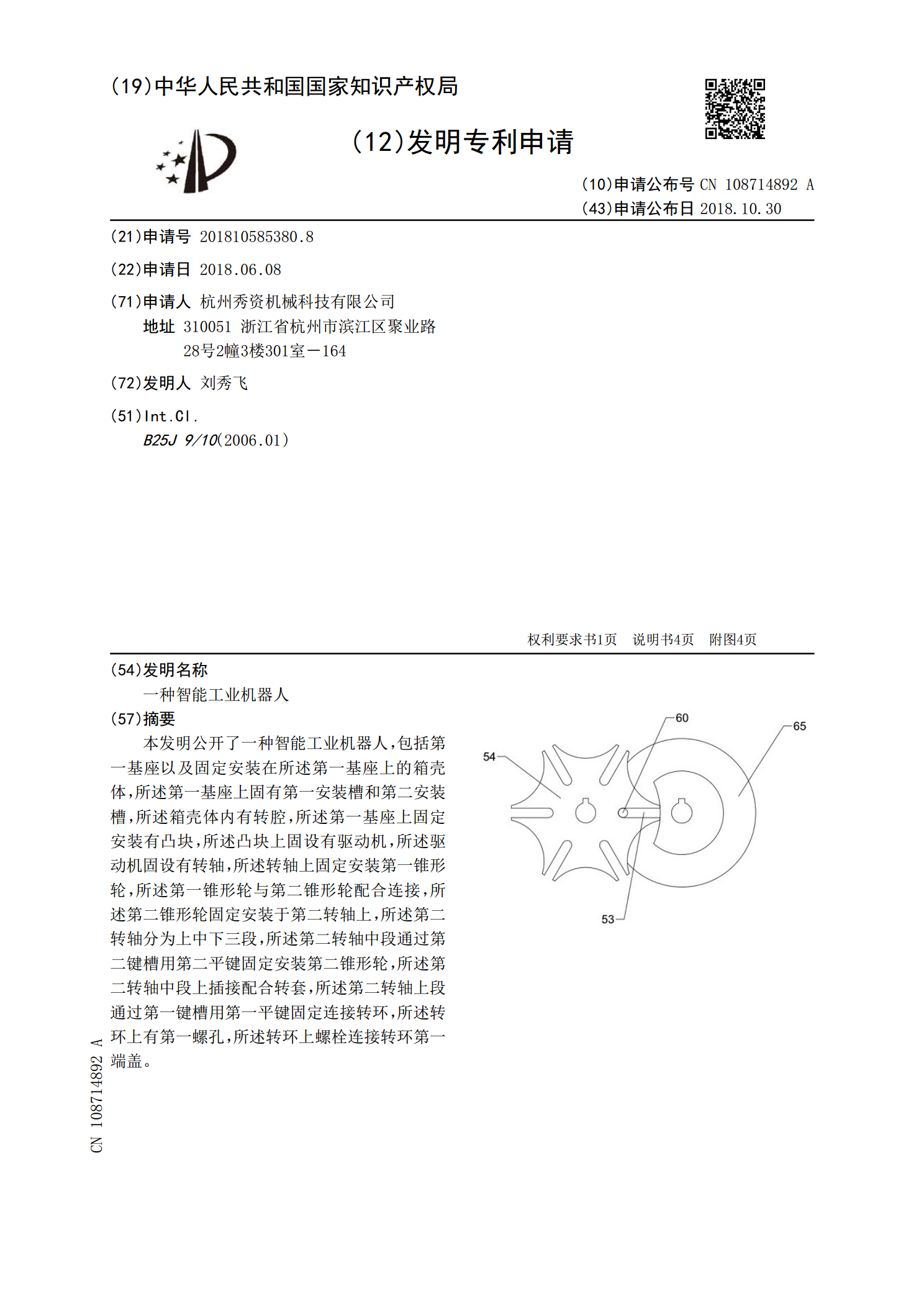
本发明公开了一种智能工业机器人,包括第一基座以及固定安装在所述第一基座上的箱壳体,所述第一基座上固有第一安装槽和第二安装槽,所述箱壳体内有转腔,所述第一基座上固定安装有凸块,所述凸块上固设有驱动机,所述驱动机固设有转轴,所述转轴上固定安装第一锥形轮,所述第一锥形轮与第二锥形轮配合连接,所述第二锥形轮固定安装于第二转轴上,所述第二转轴分为上中下三段,所述第二转轴中段通过第二键槽用第二平键固定安装第二锥形轮,所述第二转轴中段上插接配合转套,所述第二转轴上段通过第一键槽用第一平键固定连接转环,所述转环上有第一螺
一种智能工业机器人.pdf
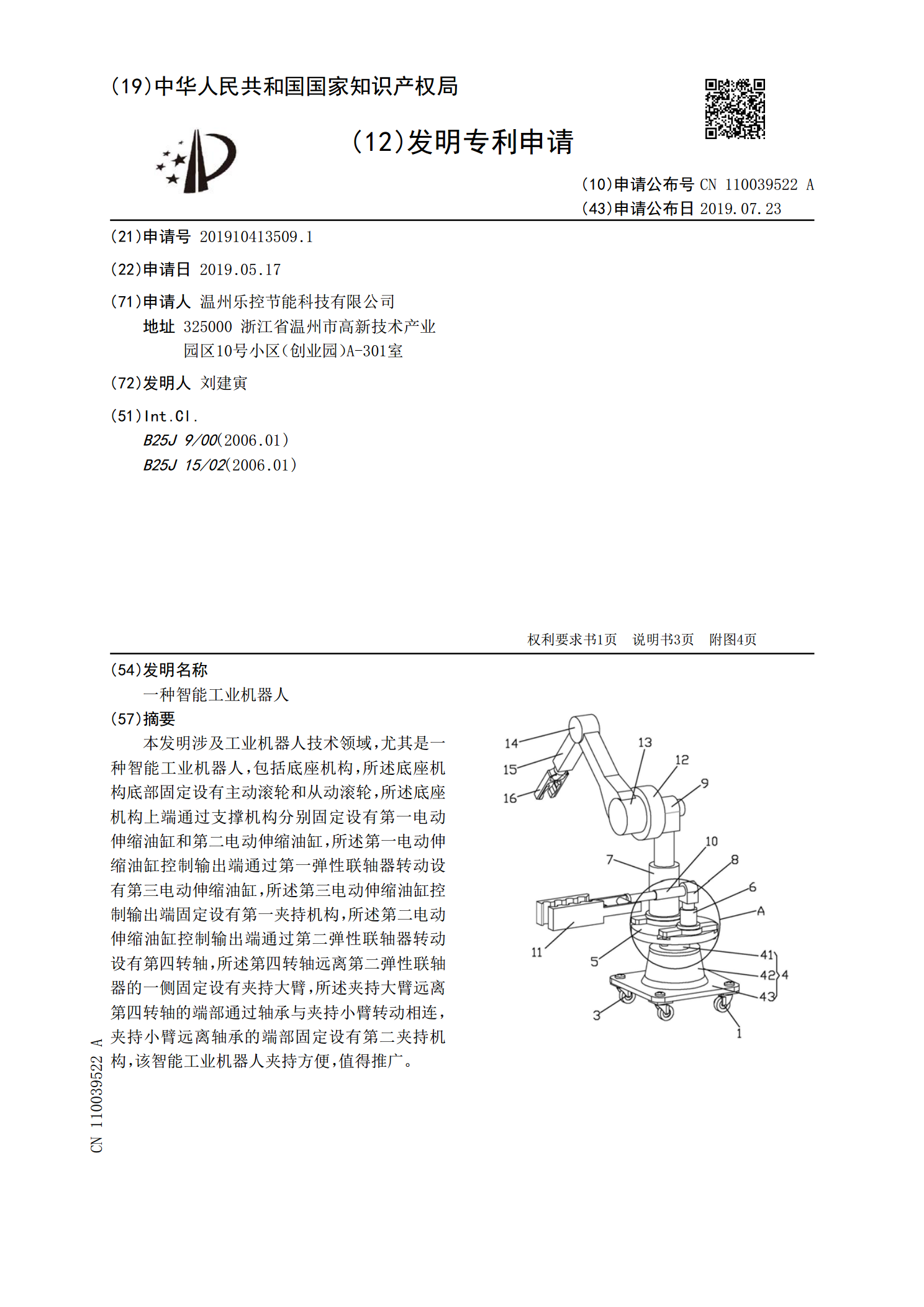
本发明涉及工业机器人技术领域,尤其是一种智能工业机器人,包括底座机构,所述底座机构底部固定设有主动滚轮和从动滚轮,所述底座机构上端通过支撑机构分别固定设有第一电动伸缩油缸和第二电动伸缩油缸,所述第一电动伸缩油缸控制输出端通过第一弹性联轴器转动设有第三电动伸缩油缸,所述第三电动伸缩油缸控制输出端固定设有第一夹持机构,所述第二电动伸缩油缸控制输出端通过第二弹性联轴器转动设有第四转轴,所述第四转轴远离第二弹性联轴器的一侧固定设有夹持大臂,所述夹持大臂远离第四转轴的端部通过轴承与夹持小臂转动相连,夹持小臂远离轴承

一种工业用智能机器人.pdf
本发明公开了一种工业用智能机器人,包括:底座;机械手臂,其转动安装在底座上;以及安装在机械手臂远离底座一端的夹持组件,夹持组件包括安装板,安装在安装板下部且靠近一端的限位板,和滑动安装在安装板下部的夹爪装置;其中夹爪装置和限位板相对设置且两者之间留有用于夹持待夹持件的空间,所夹爪装置可沿安装板移动以靠近或远离限位板,夹爪装置和/或限位板相向的一侧安装有调节装置,调节装置可根据待夹持件的尺寸以适应。本发明的夹持组件的调节装置用于抵接在待夹持件侧面,夹持时调节装置可以根据待夹持件的尺寸进行适应。其解决了现有技
一种工业用智能机器人.pdf
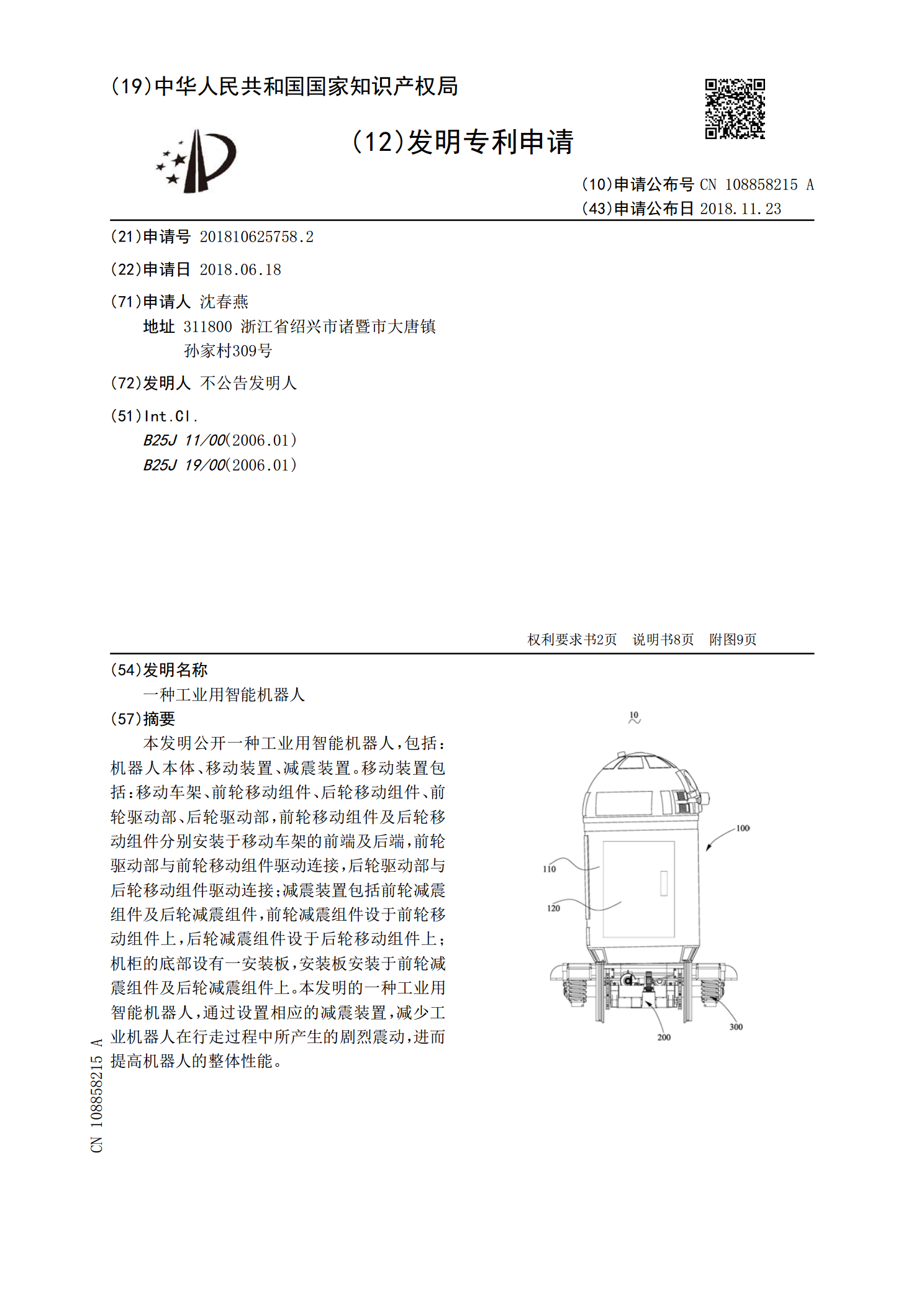
本发明公开一种工业用智能机器人,包括:机器人本体、移动装置、减震装置。移动装置包括:移动车架、前轮移动组件、后轮移动组件、前轮驱动部、后轮驱动部,前轮移动组件及后轮移动组件分别安装于移动车架的前端及后端,前轮驱动部与前轮移动组件驱动连接,后轮驱动部与后轮移动组件驱动连接;减震装置包括前轮减震组件及后轮减震组件,前轮减震组件设于前轮移动组件上,后轮减震组件设于后轮移动组件上;机柜的底部设有一安装板,安装板安装于前轮减震组件及后轮减震组件上。本发明的一种工业用智能机器人,通过设置相应的减震装置,减少工业机器人
一种智能工业机器人系统.pdf
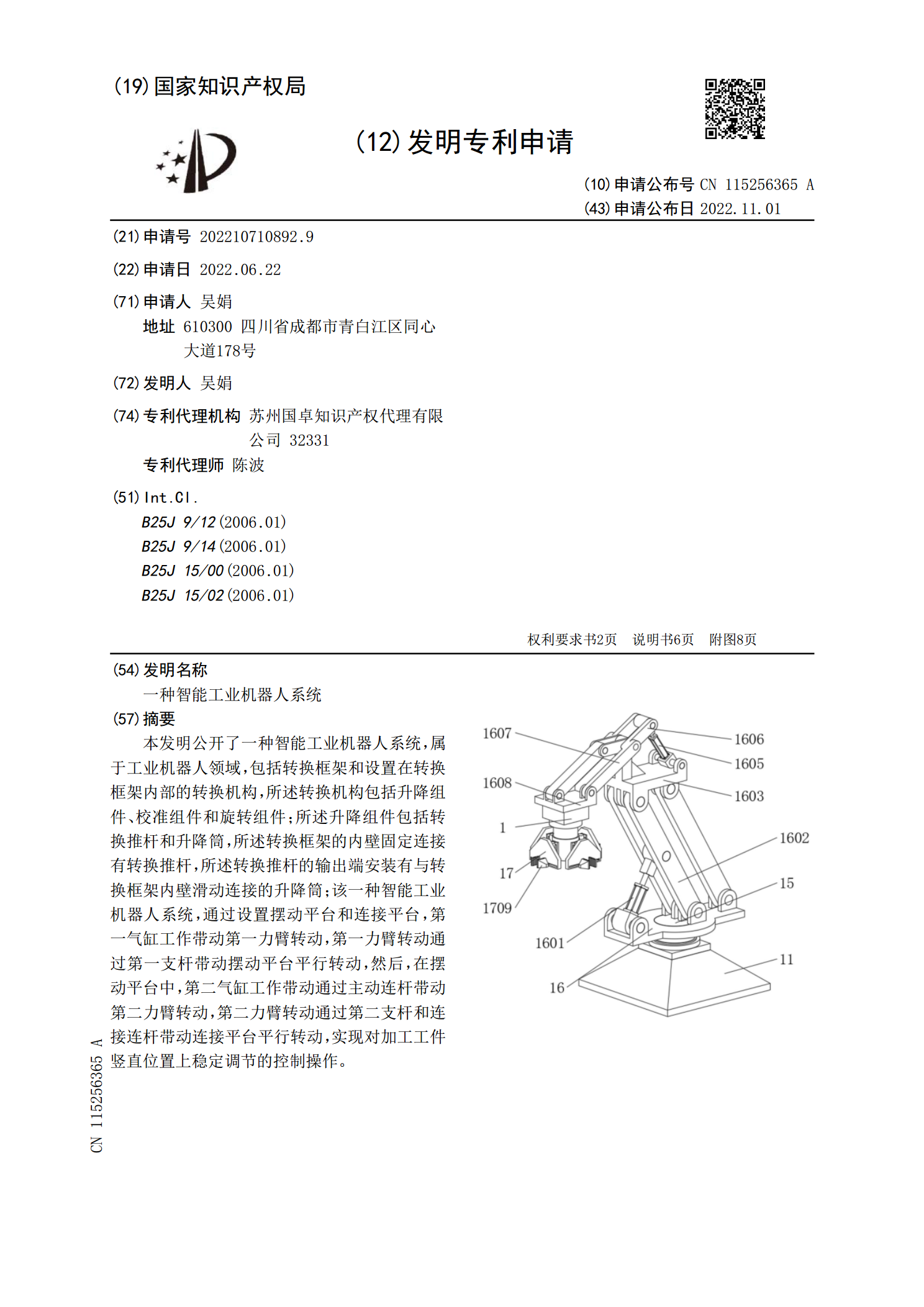
本发明公开了一种智能工业机器人系统,属于工业机器人领域,包括转换框架和设置在转换框架内部的转换机构,所述转换机构包括升降组件、校准组件和旋转组件;所述升降组件包括转换推杆和升降筒,所述转换框架的内壁固定连接有转换推杆,所述转换推杆的输出端安装有与转换框架内壁滑动连接的升降筒;该一种智能工业机器人系统,通过设置摆动平台和连接平台,第一气缸工作带动第一力臂转动,第一力臂转动通过第一支杆带动摆动平台平行转动,然后,在摆动平台中,第二气缸工作带动通过主动连杆带动第二力臂转动,第二力臂转动通过第二支杆和连接连杆带动