
一种智能工业机器人系统.pdf

努力****星驰

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种智能工业机器人系统.pdf
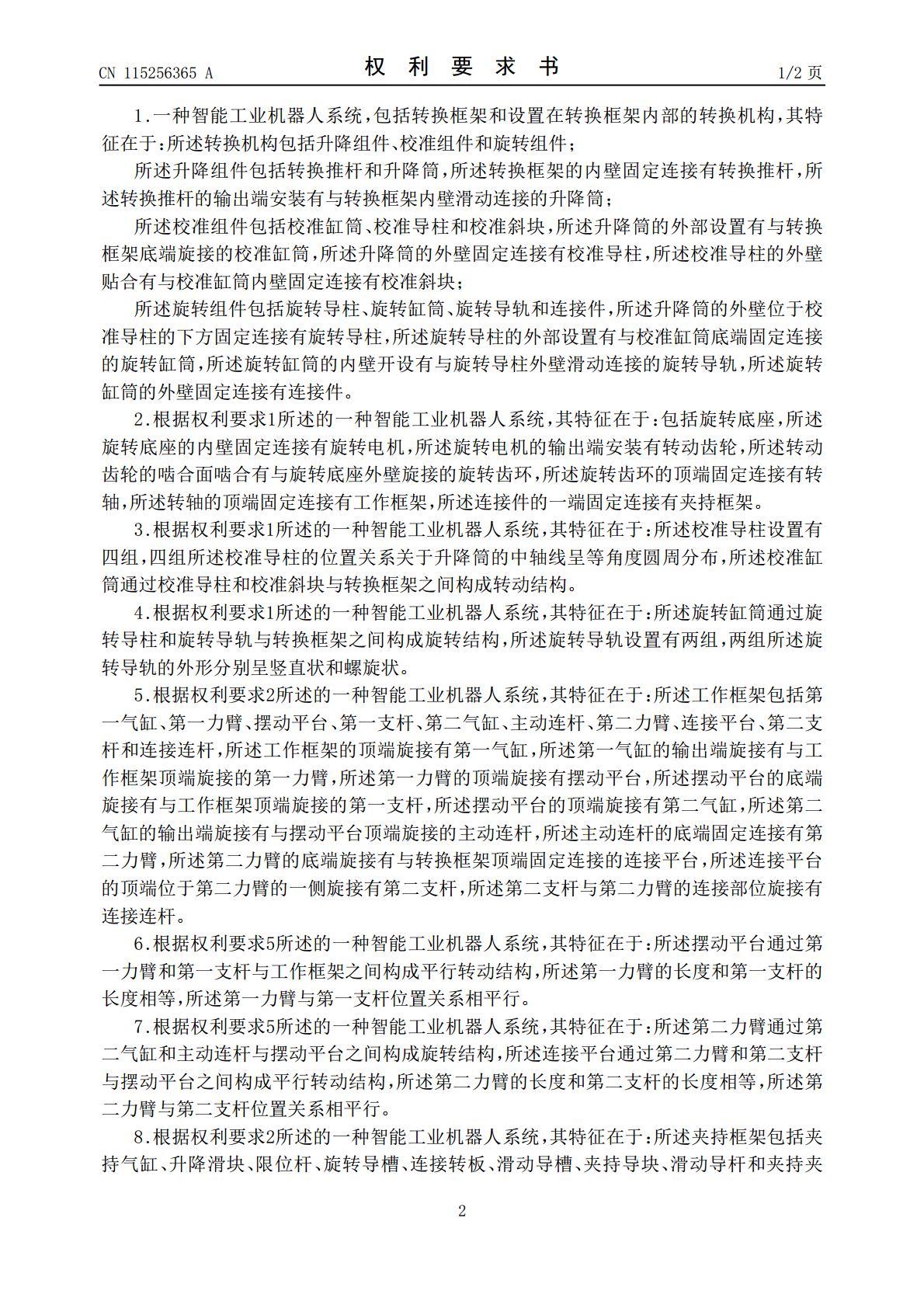
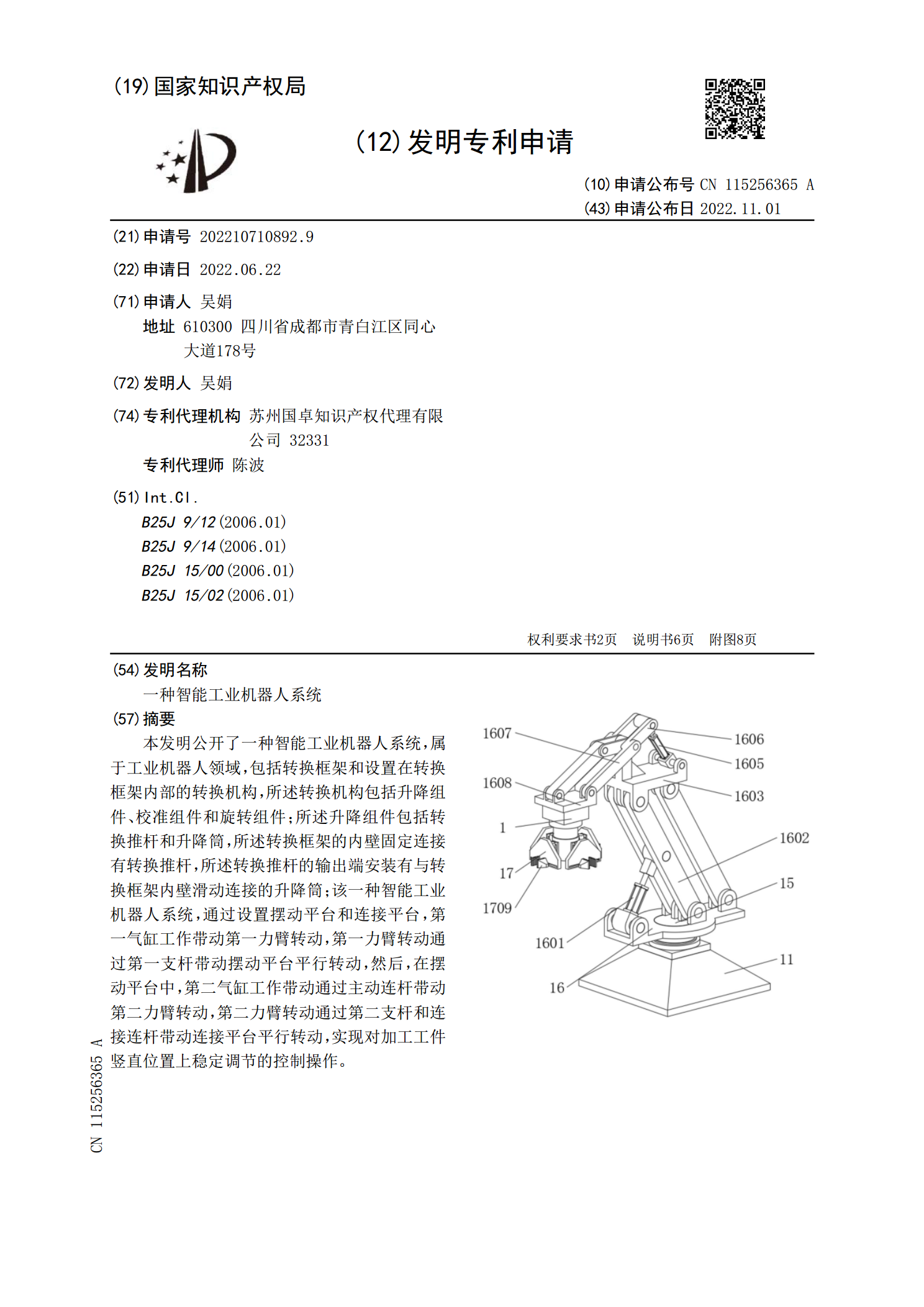
本发明公开了一种智能工业机器人系统,属于工业机器人领域,包括转换框架和设置在转换框架内部的转换机构,所述转换机构包括升降组件、校准组件和旋转组件;所述升降组件包括转换推杆和升降筒,所述转换框架的内壁固定连接有转换推杆,所述转换推杆的输出端安装有与转换框架内壁滑动连接的升降筒;该一种智能工业机器人系统,通过设置摆动平台和连接平台,第一气缸工作带动第一力臂转动,第一力臂转动通过第一支杆带动摆动平台平行转动,然后,在摆动平台中,第二气缸工作带动通过主动连杆带动第二力臂转动,第二力臂转动通过第二支杆和连接连杆带动
一种智能工业机器人控制系统.pdf
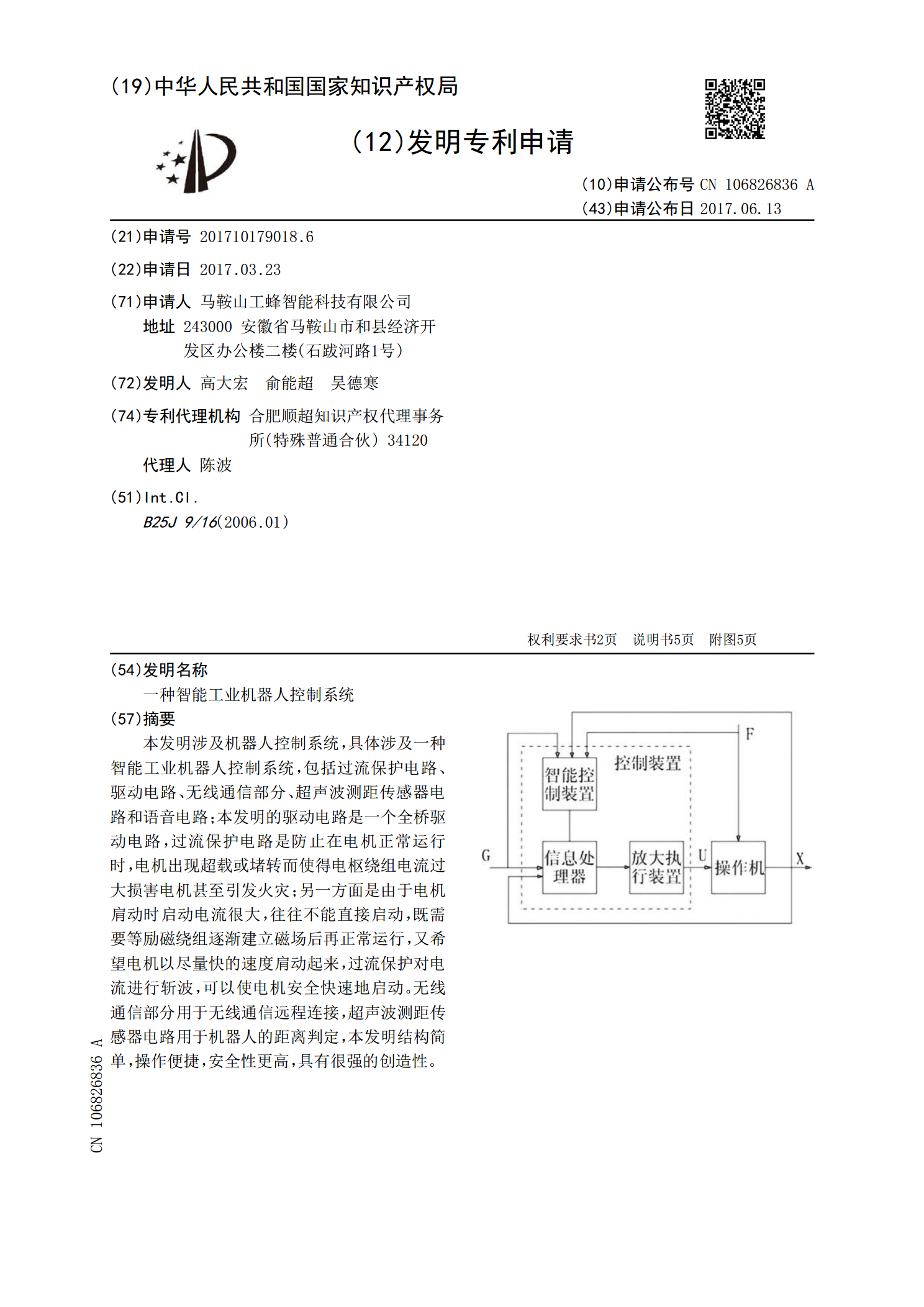
本发明涉及机器人控制系统,具体涉及一种智能工业机器人控制系统,包括过流保护电路、驱动电路、无线通信部分、超声波测距传感器电路和语音电路;本发明的驱动电路是一个全桥驱动电路,过流保护电路是防止在电机正常运行时,电机出现超载或堵转而使得电枢绕组电流过大损害电机甚至引发火灾;另一方面是由于电机肩动时启动电流很大,往往不能直接启动,既需要等励磁绕组逐渐建立磁场后再正常运行,又希望电机以尽量快的速度肩动起来,过流保护对电流进行斩波,可以使电机安全快速地启动。无线通信部分用于无线通信远程连接,超声波测距传感器电路用于
一种基于工业机器人的智能制造系统.pdf
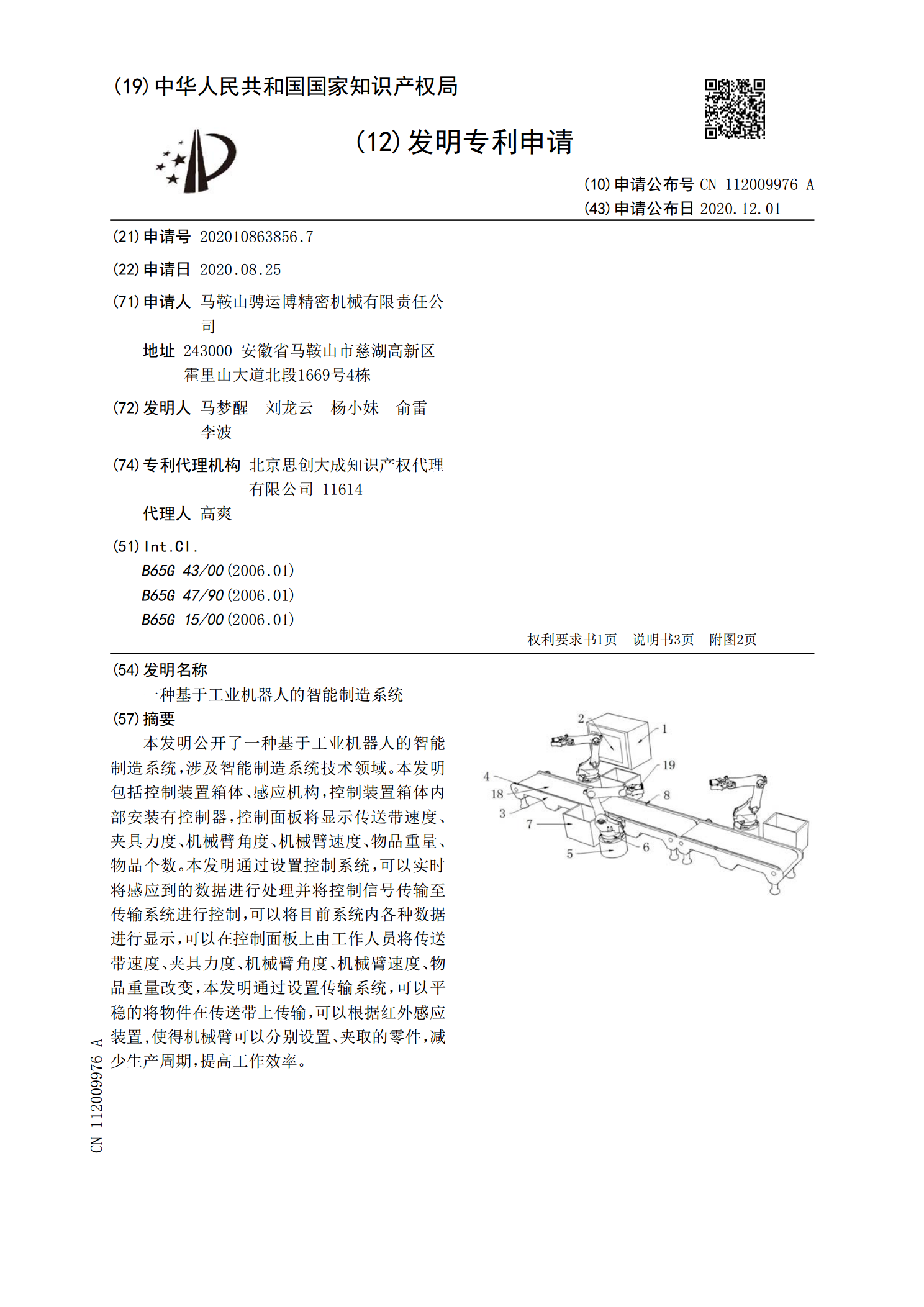
本发明公开了一种基于工业机器人的智能制造系统,涉及智能制造系统技术领域。本发明包括控制装置箱体、感应机构,控制装置箱体内部安装有控制器,控制面板将显示传送带速度、夹具力度、机械臂角度、机械臂速度、物品重量、物品个数。本发明通过设置控制系统,可以实时将感应到的数据进行处理并将控制信号传输至传输系统进行控制,可以将目前系统内各种数据进行显示,可以在控制面板上由工作人员将传送带速度、夹具力度、机械臂角度、机械臂速度、物品重量改变,本发明通过设置传输系统,可以平稳的将物件在传送带上传输,可以根据红外感应装置,使得
一种智能工业机器人.pdf
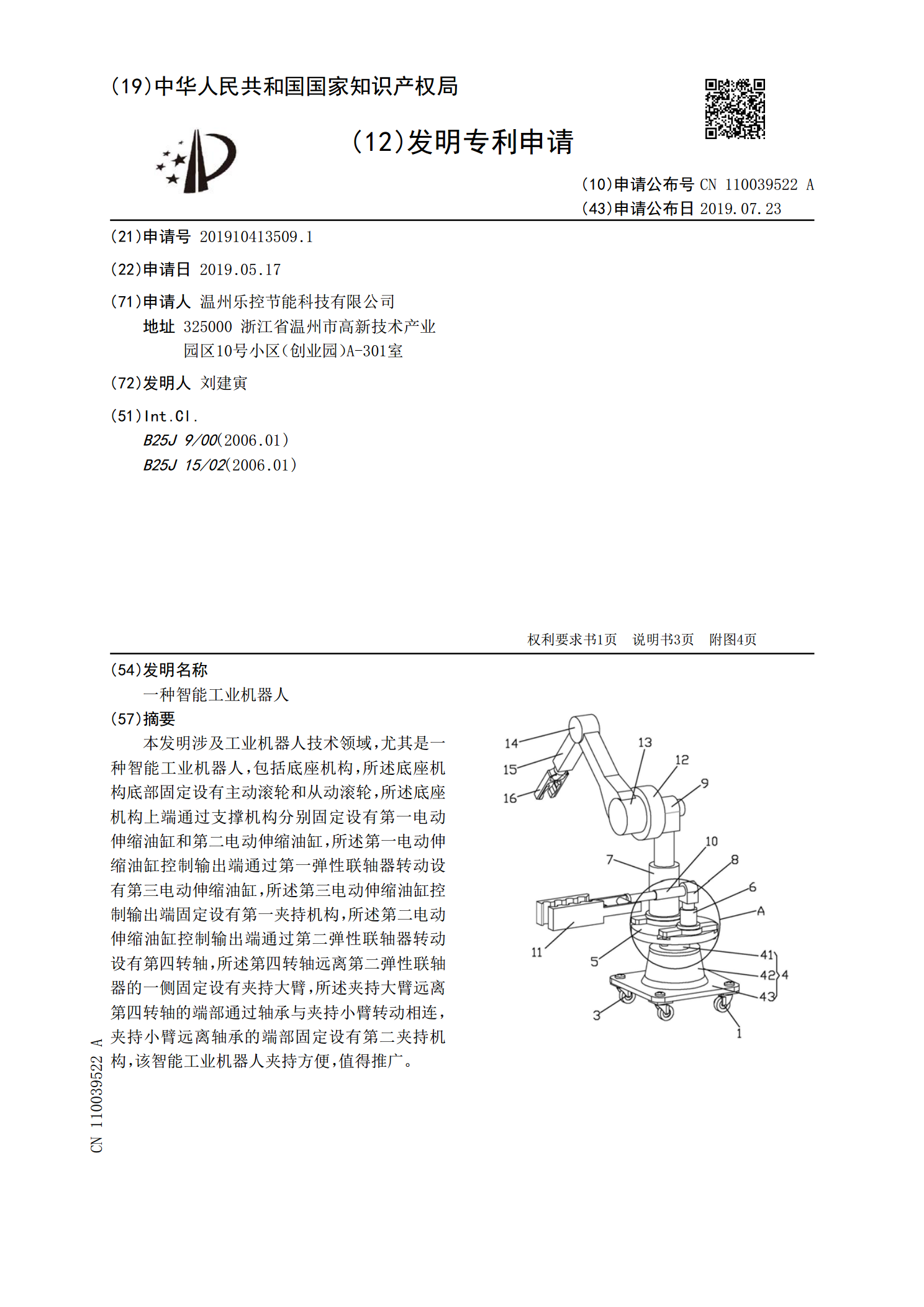
本发明涉及工业机器人技术领域,尤其是一种智能工业机器人,包括底座机构,所述底座机构底部固定设有主动滚轮和从动滚轮,所述底座机构上端通过支撑机构分别固定设有第一电动伸缩油缸和第二电动伸缩油缸,所述第一电动伸缩油缸控制输出端通过第一弹性联轴器转动设有第三电动伸缩油缸,所述第三电动伸缩油缸控制输出端固定设有第一夹持机构,所述第二电动伸缩油缸控制输出端通过第二弹性联轴器转动设有第四转轴,所述第四转轴远离第二弹性联轴器的一侧固定设有夹持大臂,所述夹持大臂远离第四转轴的端部通过轴承与夹持小臂转动相连,夹持小臂远离轴承
一种智能工业机器人.pdf
本发明公开了一种智能工业机器人,包括第一基座以及固定安装在所述第一基座上的箱壳体,所述第一基座上固有第一安装槽和第二安装槽,所述箱壳体内有转腔,所述第一基座上固定安装有凸块,所述凸块上固设有驱动机,所述驱动机固设有转轴,所述转轴上固定安装第一锥形轮,所述第一锥形轮与第二锥形轮配合连接,所述第二锥形轮固定安装于第二转轴上,所述第二转轴分为上中下三段,所述第二转轴中段通过第二键槽用第二平键固定安装第二锥形轮,所述第二转轴中段上插接配合转套,所述第二转轴上段通过第一键槽用第一平键固定连接转环,所述转环上有第一螺