
一种工业用智能机器人.pdf

Ch****91


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种工业用智能机器人.pdf
本发明公开了一种工业用智能机器人,包括:底座;机械手臂,其转动安装在底座上;以及安装在机械手臂远离底座一端的夹持组件,夹持组件包括安装板,安装在安装板下部且靠近一端的限位板,和滑动安装在安装板下部的夹爪装置;其中夹爪装置和限位板相对设置且两者之间留有用于夹持待夹持件的空间,所夹爪装置可沿安装板移动以靠近或远离限位板,夹爪装置和/或限位板相向的一侧安装有调节装置,调节装置可根据待夹持件的尺寸以适应。本发明的夹持组件的调节装置用于抵接在待夹持件侧面,夹持时调节装置可以根据待夹持件的尺寸进行适应。其解决了现有技
一种工业用智能机器人.pdf
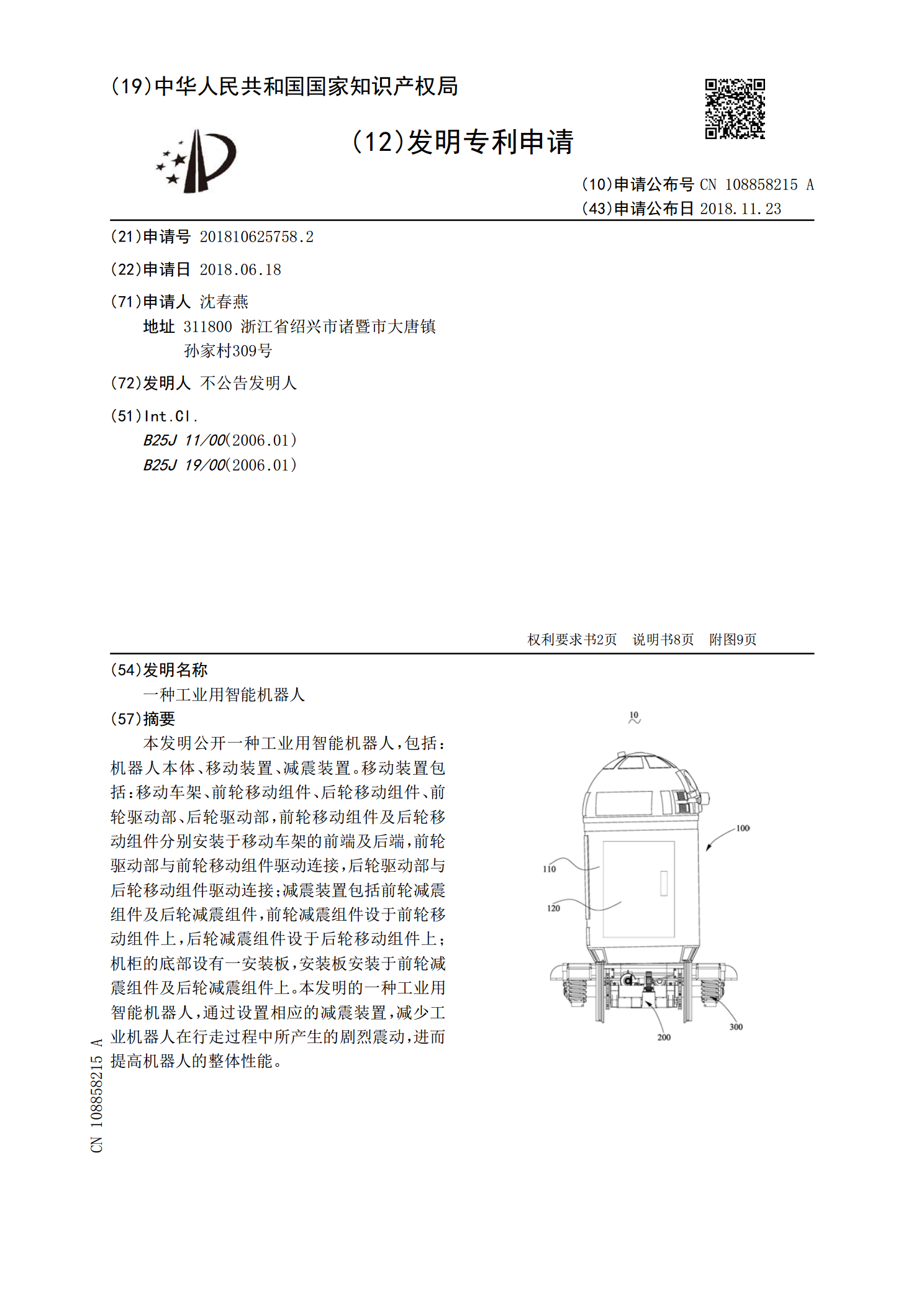
本发明公开一种工业用智能机器人,包括:机器人本体、移动装置、减震装置。移动装置包括:移动车架、前轮移动组件、后轮移动组件、前轮驱动部、后轮驱动部,前轮移动组件及后轮移动组件分别安装于移动车架的前端及后端,前轮驱动部与前轮移动组件驱动连接,后轮驱动部与后轮移动组件驱动连接;减震装置包括前轮减震组件及后轮减震组件,前轮减震组件设于前轮移动组件上,后轮减震组件设于后轮移动组件上;机柜的底部设有一安装板,安装板安装于前轮减震组件及后轮减震组件上。本发明的一种工业用智能机器人,通过设置相应的减震装置,减少工业机器人
一种工业运输用智能机器人.pdf
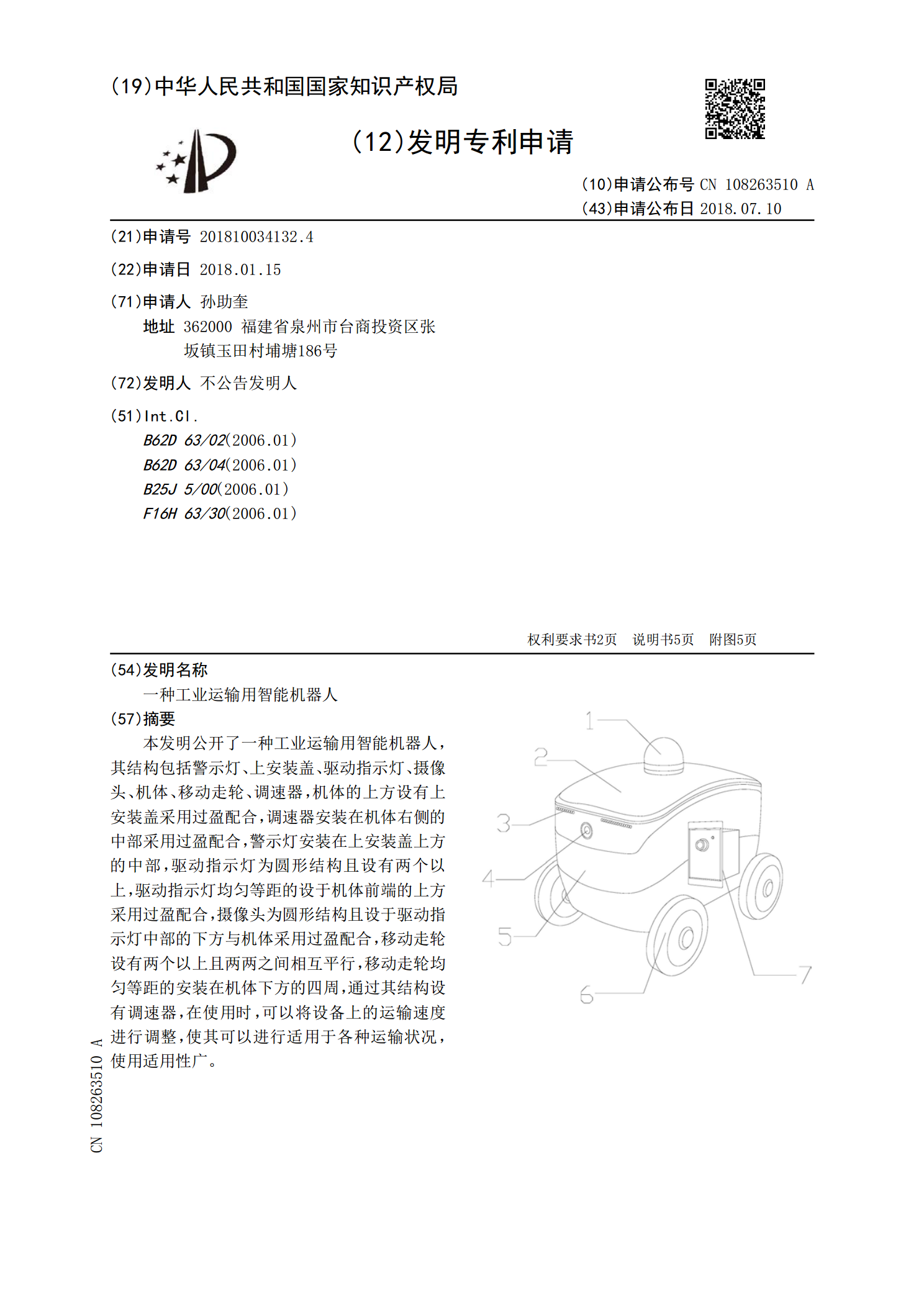
本发明公开了一种工业运输用智能机器人,其结构包括警示灯、上安装盖、驱动指示灯、摄像头、机体、移动走轮、调速器,机体的上方设有上安装盖采用过盈配合,调速器安装在机体右侧的中部采用过盈配合,警示灯安装在上安装盖上方的中部,驱动指示灯为圆形结构且设有两个以上,驱动指示灯均匀等距的设于机体前端的上方采用过盈配合,摄像头为圆形结构且设于驱动指示灯中部的下方与机体采用过盈配合,移动走轮设有两个以上且两两之间相互平行,移动走轮均匀等距的安装在机体下方的四周,通过其结构设有调速器,在使用时,可以将设备上的运输速度进行调整
一种智能工业机器人.pdf
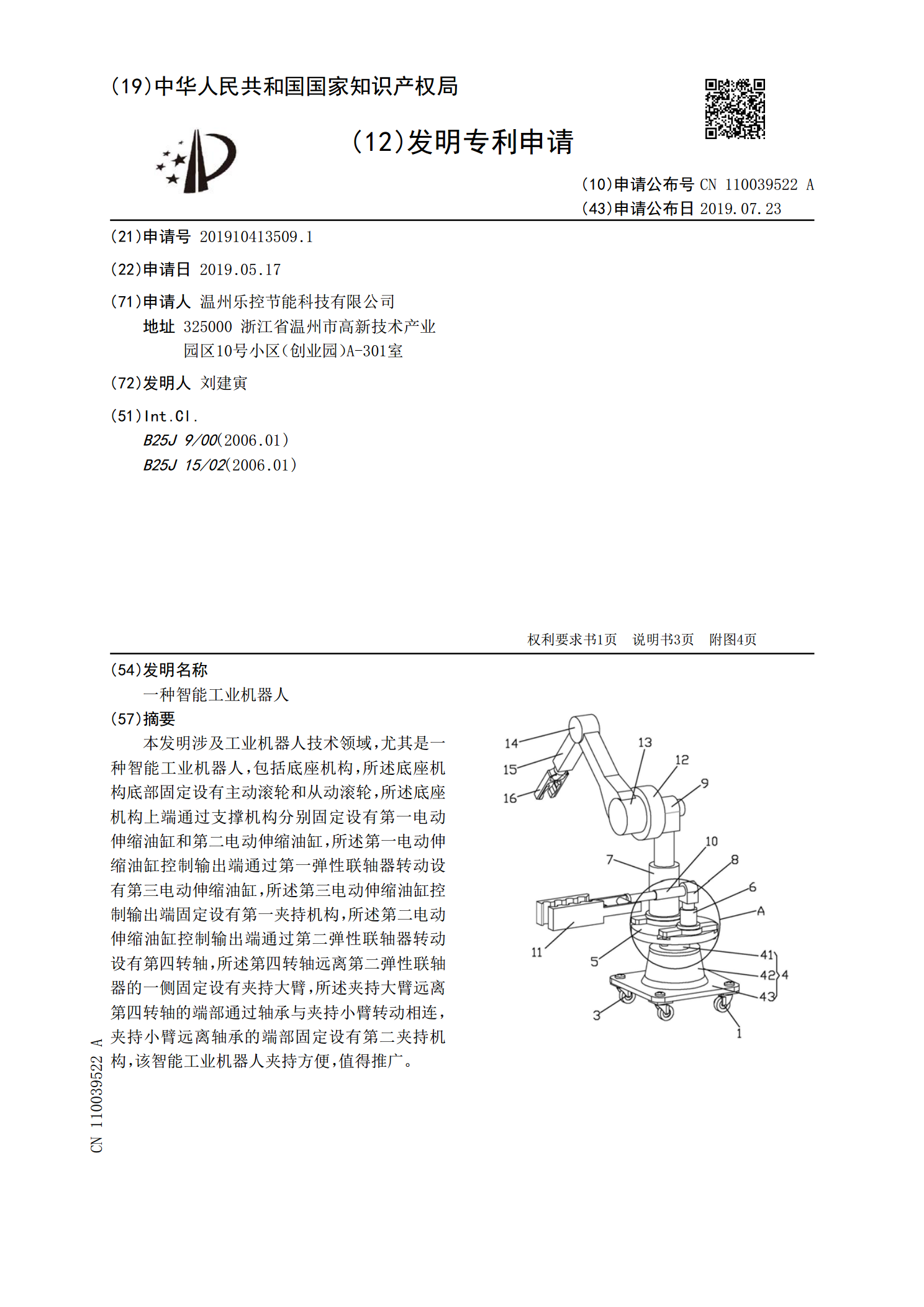
本发明涉及工业机器人技术领域,尤其是一种智能工业机器人,包括底座机构,所述底座机构底部固定设有主动滚轮和从动滚轮,所述底座机构上端通过支撑机构分别固定设有第一电动伸缩油缸和第二电动伸缩油缸,所述第一电动伸缩油缸控制输出端通过第一弹性联轴器转动设有第三电动伸缩油缸,所述第三电动伸缩油缸控制输出端固定设有第一夹持机构,所述第二电动伸缩油缸控制输出端通过第二弹性联轴器转动设有第四转轴,所述第四转轴远离第二弹性联轴器的一侧固定设有夹持大臂,所述夹持大臂远离第四转轴的端部通过轴承与夹持小臂转动相连,夹持小臂远离轴承
一种智能工业机器人.pdf
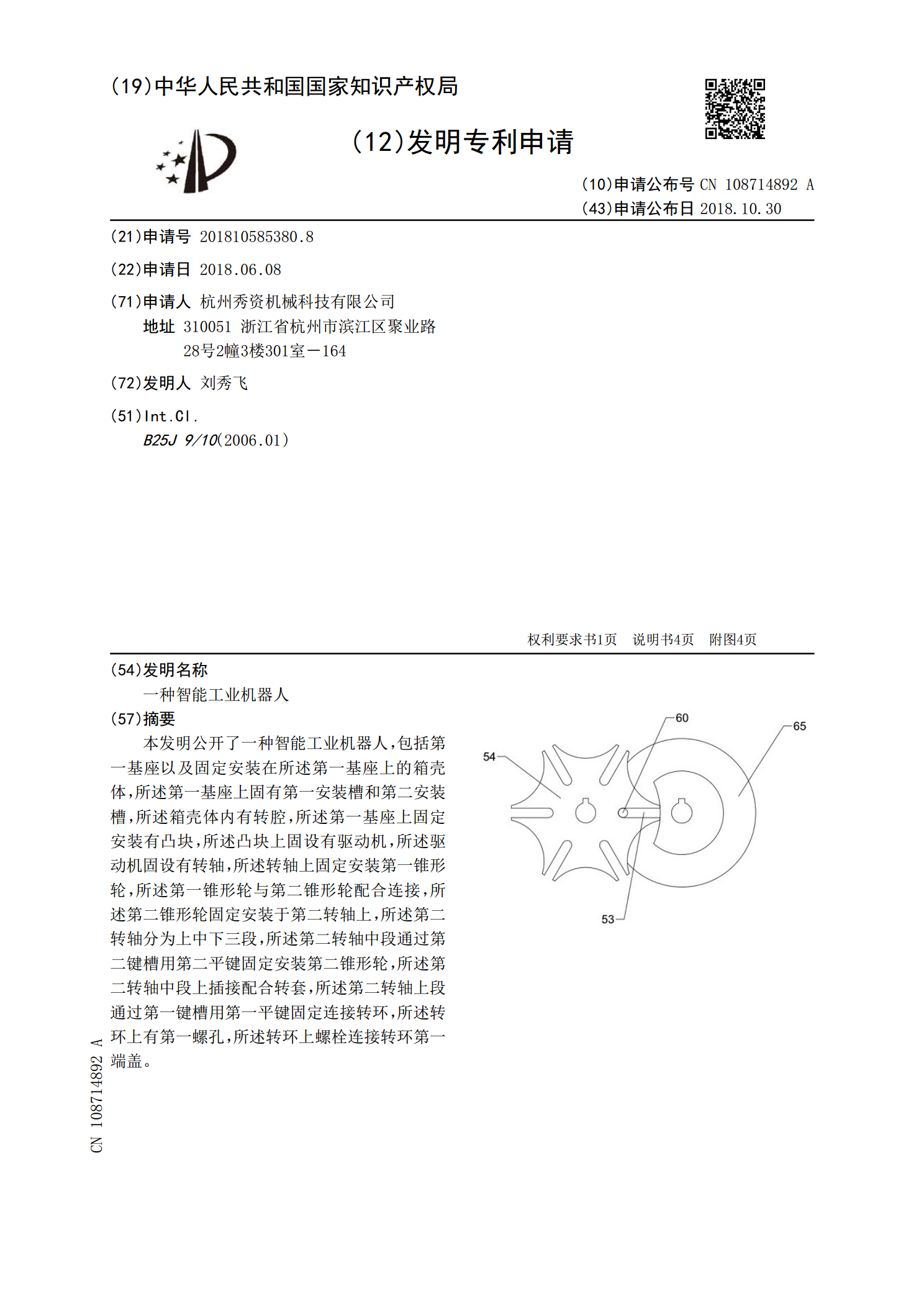
本发明公开了一种智能工业机器人,包括第一基座以及固定安装在所述第一基座上的箱壳体,所述第一基座上固有第一安装槽和第二安装槽,所述箱壳体内有转腔,所述第一基座上固定安装有凸块,所述凸块上固设有驱动机,所述驱动机固设有转轴,所述转轴上固定安装第一锥形轮,所述第一锥形轮与第二锥形轮配合连接,所述第二锥形轮固定安装于第二转轴上,所述第二转轴分为上中下三段,所述第二转轴中段通过第二键槽用第二平键固定安装第二锥形轮,所述第二转轴中段上插接配合转套,所述第二转轴上段通过第一键槽用第一平键固定连接转环,所述转环上有第一螺