
一种光伏清洁机器人行走系统和方法.pdf

夏萍****文章

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种光伏清洁机器人行走系统和方法.pdf
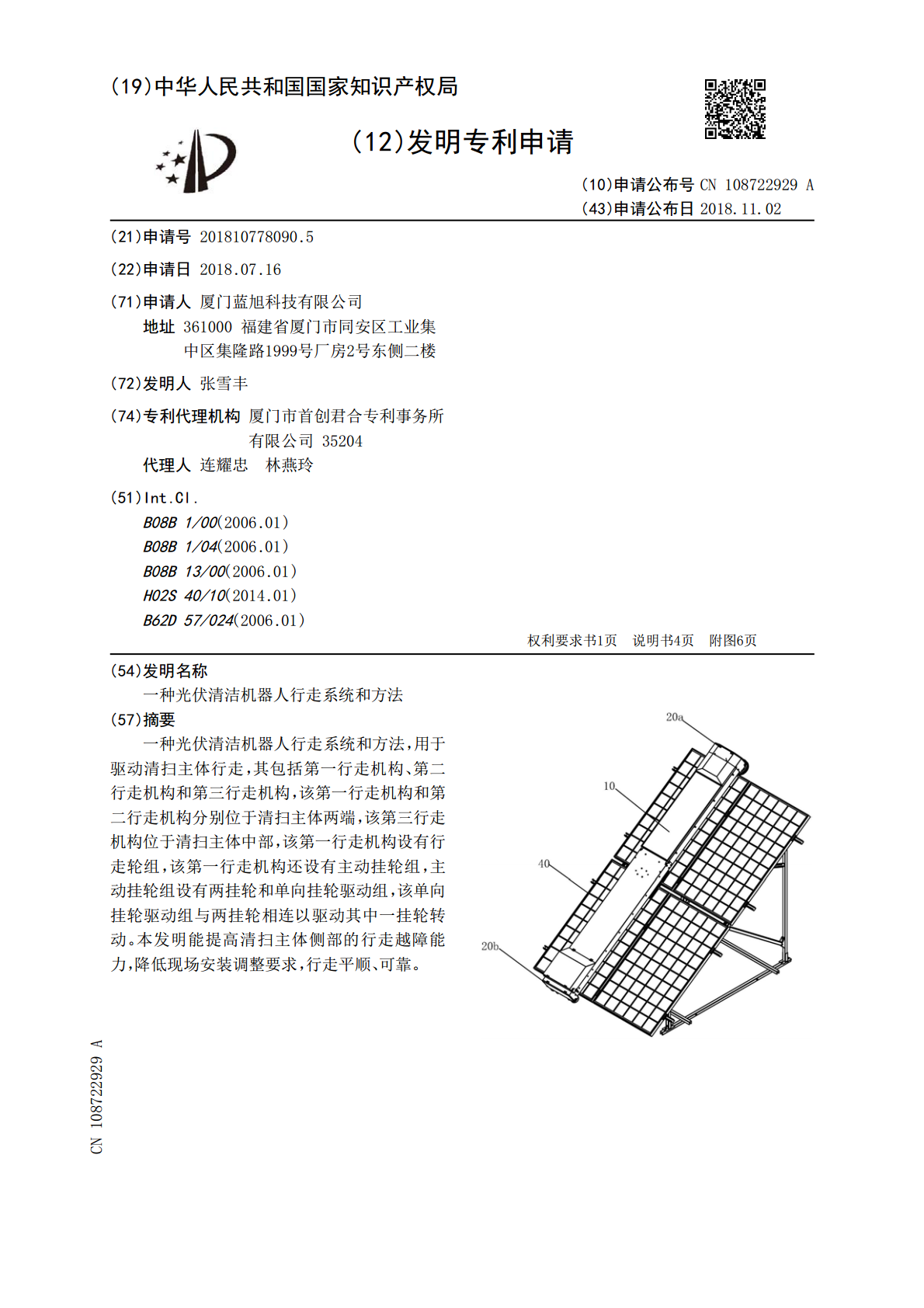
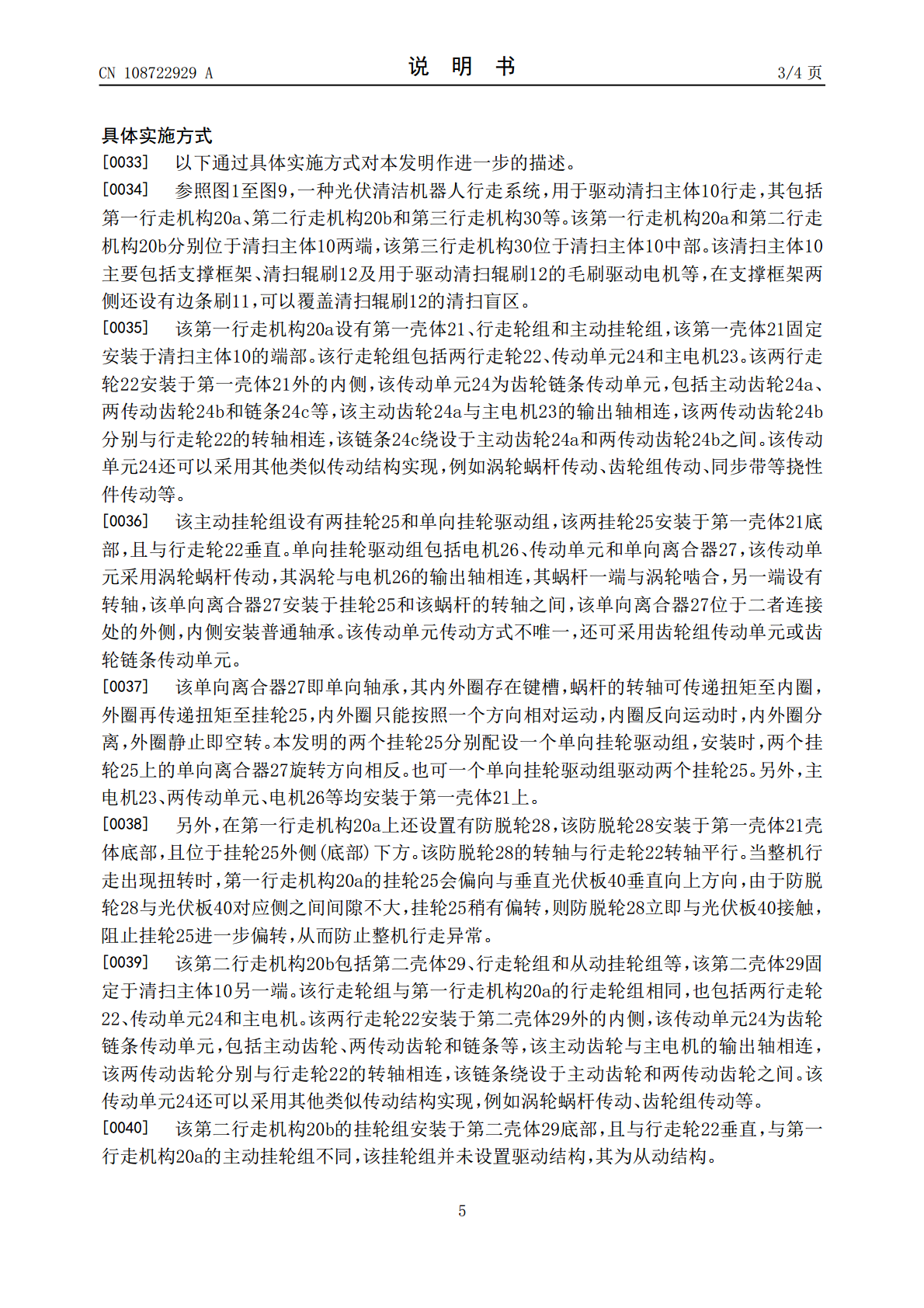
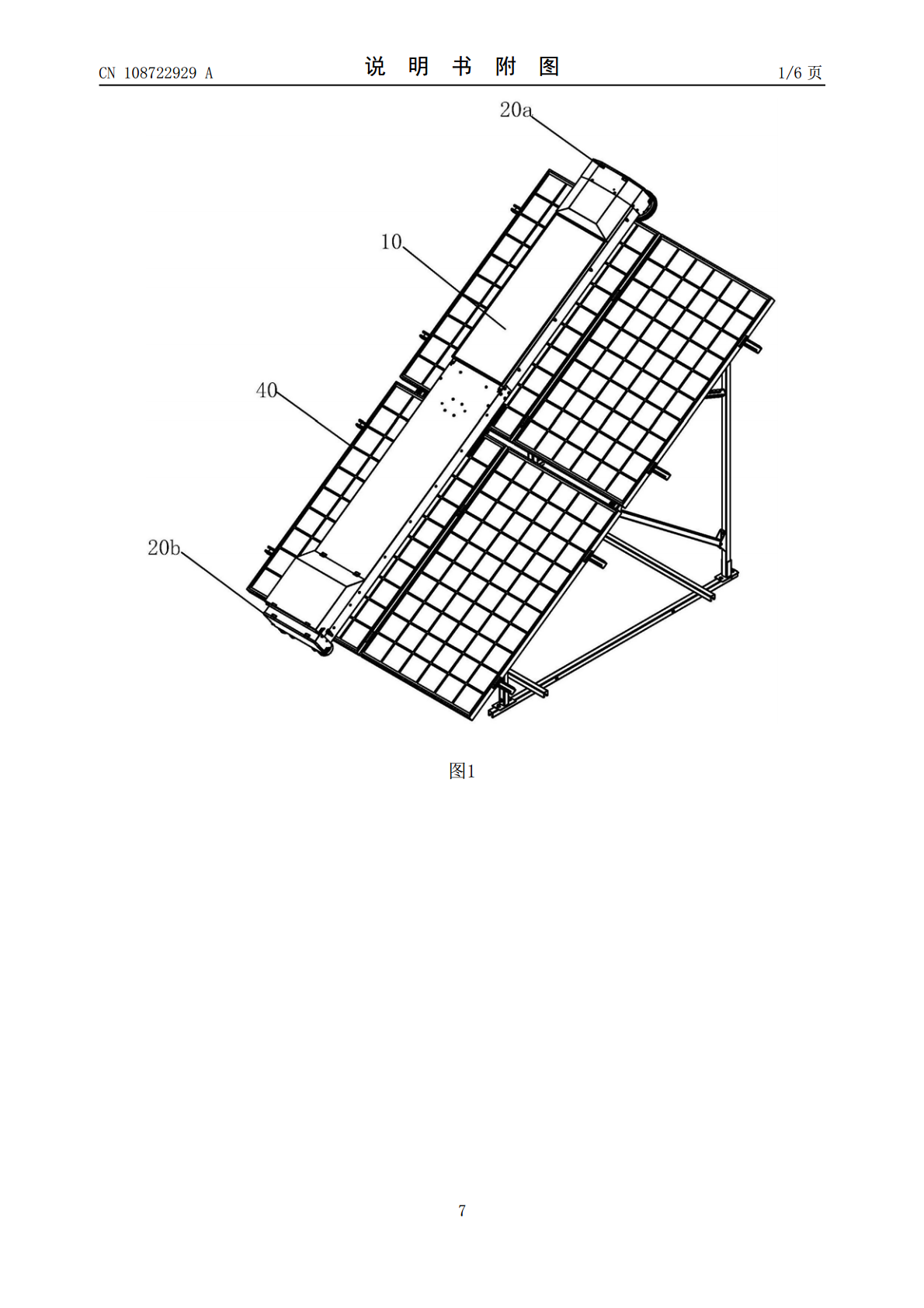
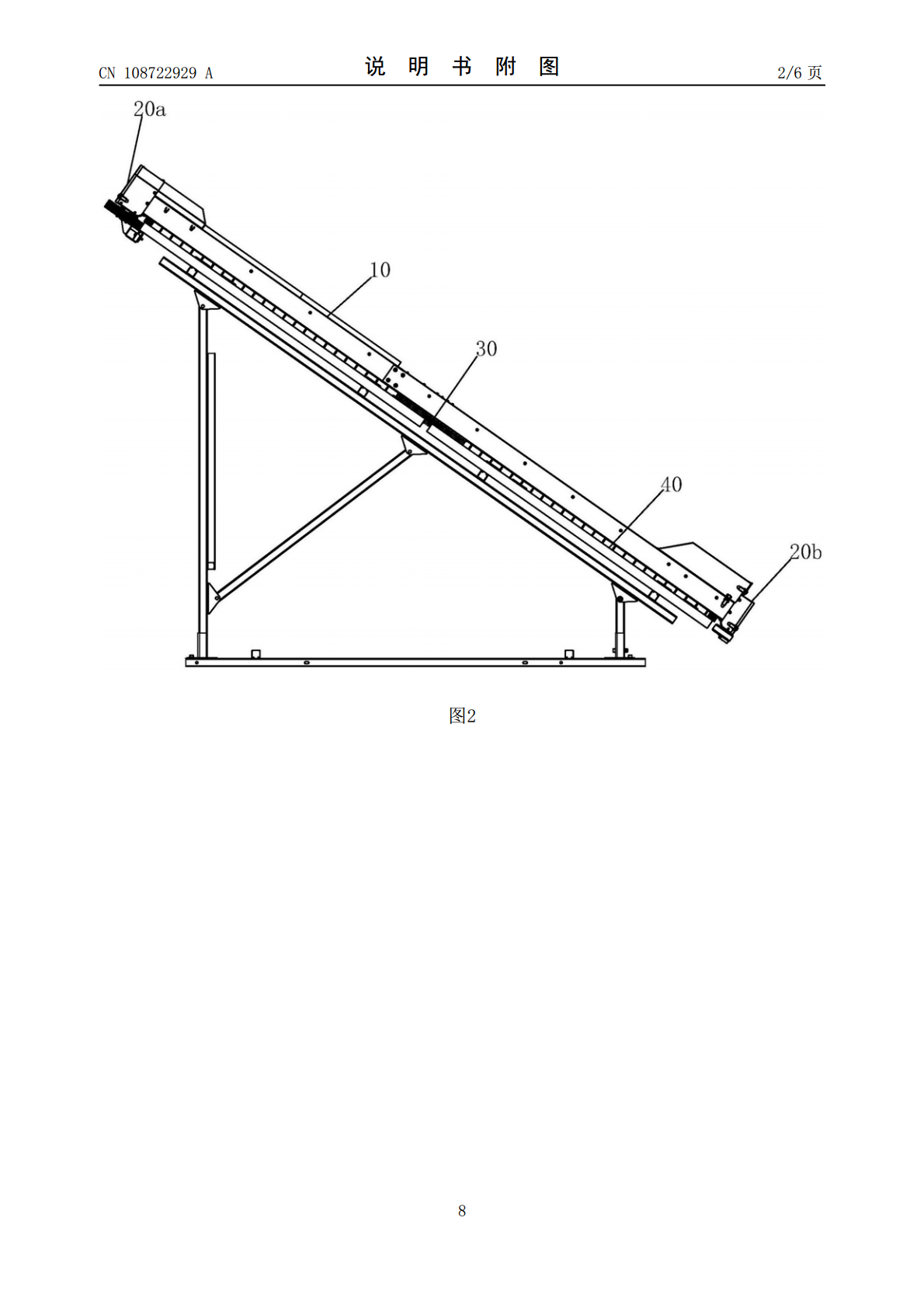
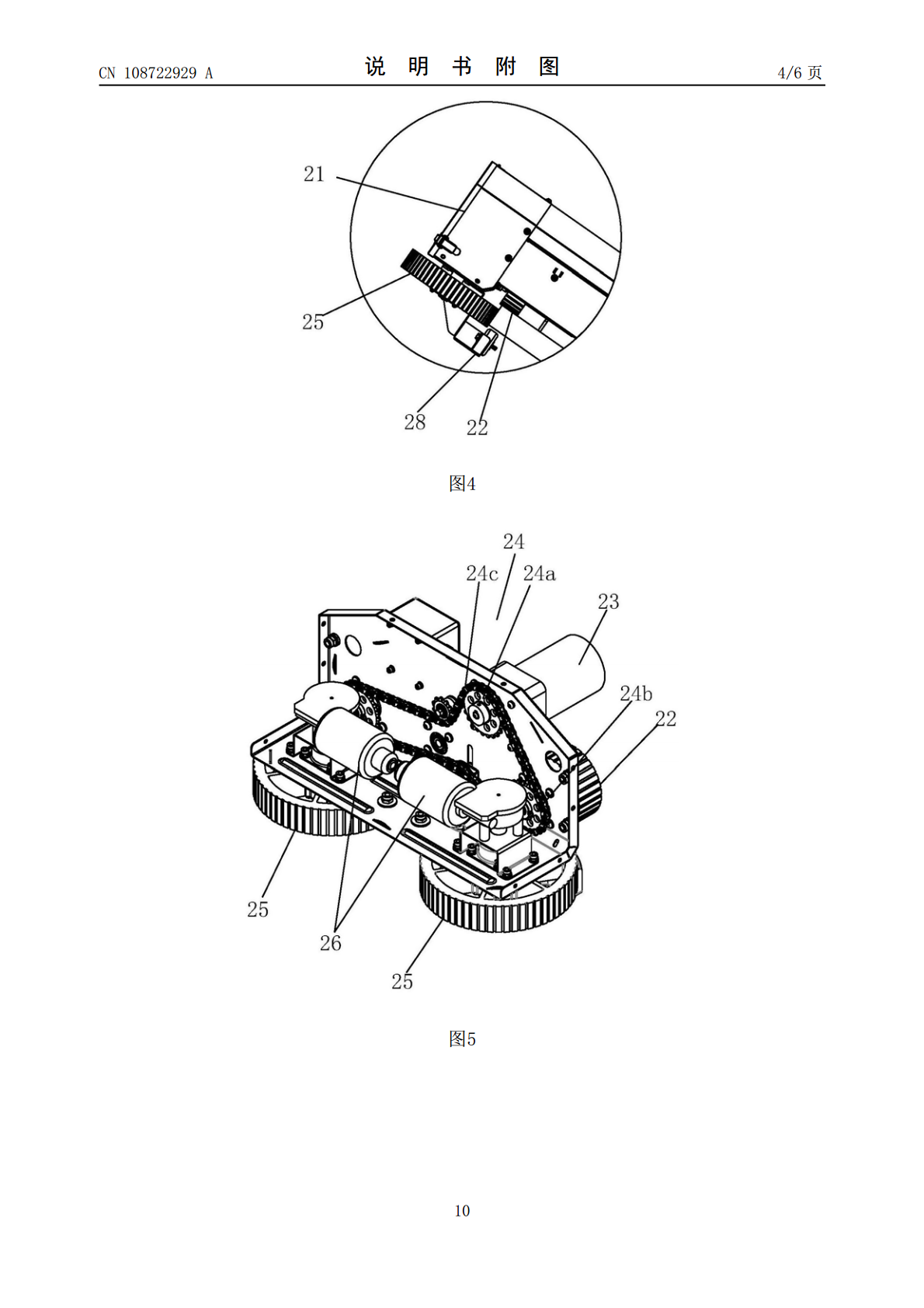
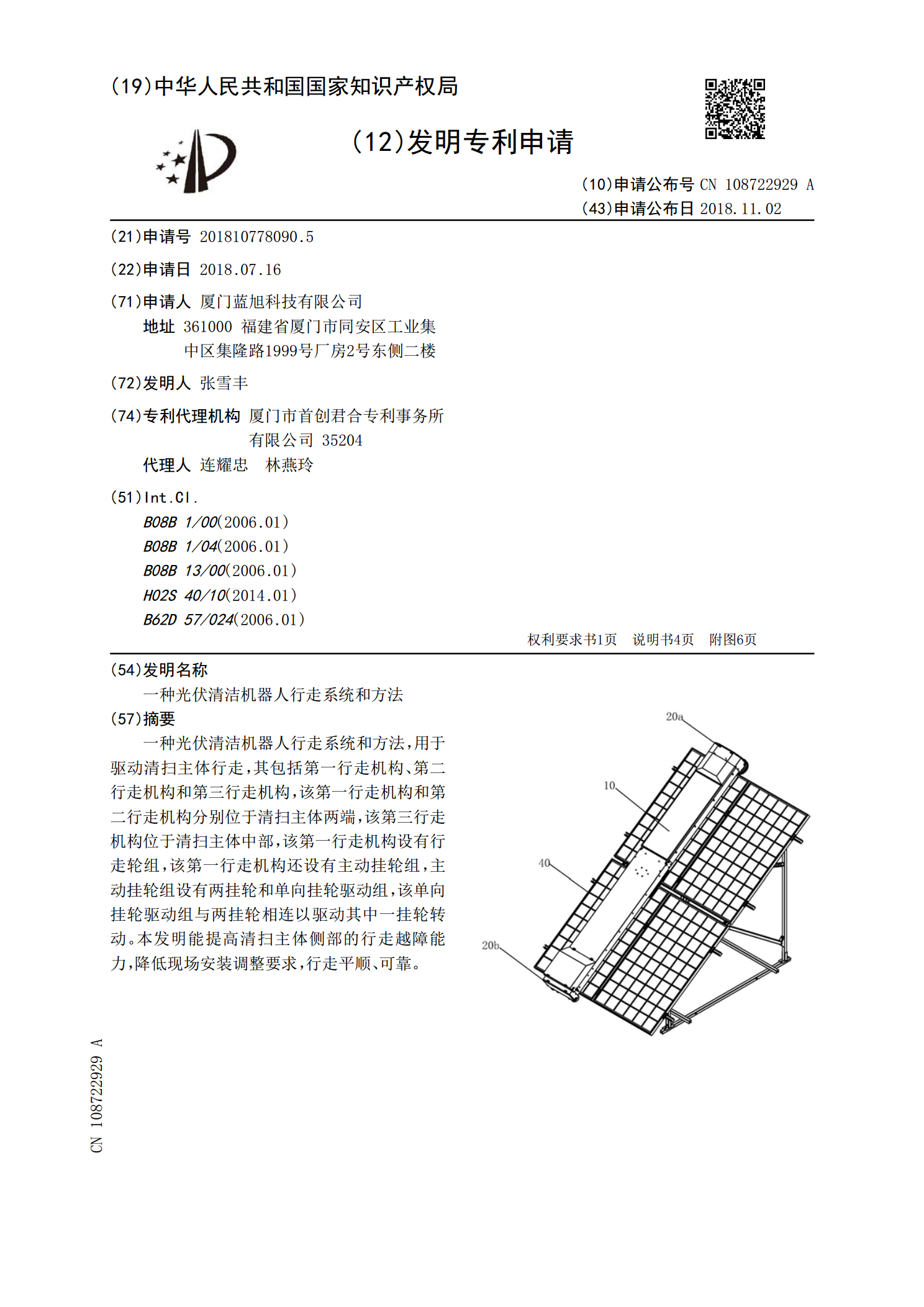
一种光伏清洁机器人行走系统和方法,用于驱动清扫主体行走,其包括第一行走机构、第二行走机构和第三行走机构,该第一行走机构和第二行走机构分别位于清扫主体两端,该第三行走机构位于清扫主体中部,该第一行走机构设有行走轮组,该第一行走机构还设有主动挂轮组,主动挂轮组设有两挂轮和单向挂轮驱动组,该单向挂轮驱动组与两挂轮相连以驱动其中一挂轮转动。本发明能提高清扫主体侧部的行走越障能力,降低现场安装调整要求,行走平顺、可靠。
光伏电站清洁机器人系统.pdf
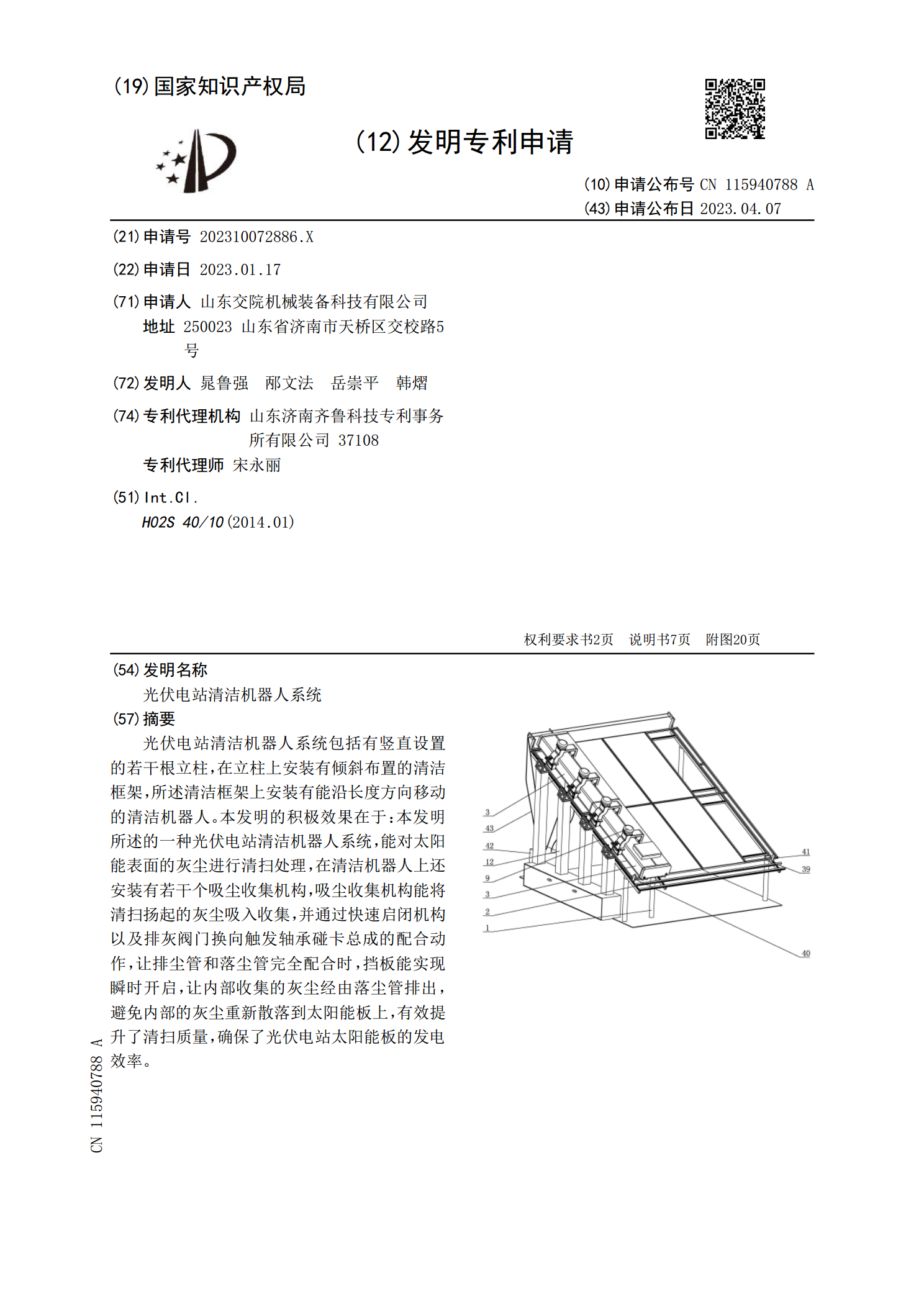
光伏电站清洁机器人系统包括有竖直设置的若干根立柱,在立柱上安装有倾斜布置的清洁框架,所述清洁框架上安装有能沿长度方向移动的清洁机器人。本发明的积极效果在于:本发明所述的一种光伏电站清洁机器人系统,能对太阳能表面的灰尘进行清扫处理,在清洁机器人上还安装有若干个吸尘收集机构,吸尘收集机构能将清扫扬起的灰尘吸入收集,并通过快速启闭机构以及排灰阀门换向触发轴承碰卡总成的配合动作,让排尘管和落尘管完全配合时,挡板能实现瞬时开启,让内部收集的灰尘经由落尘管排出,避免内部的灰尘重新散落到太阳能板上,有效提升了清扫质量,
一种用于光伏组件清洁检测机器人的行走装置.pdf
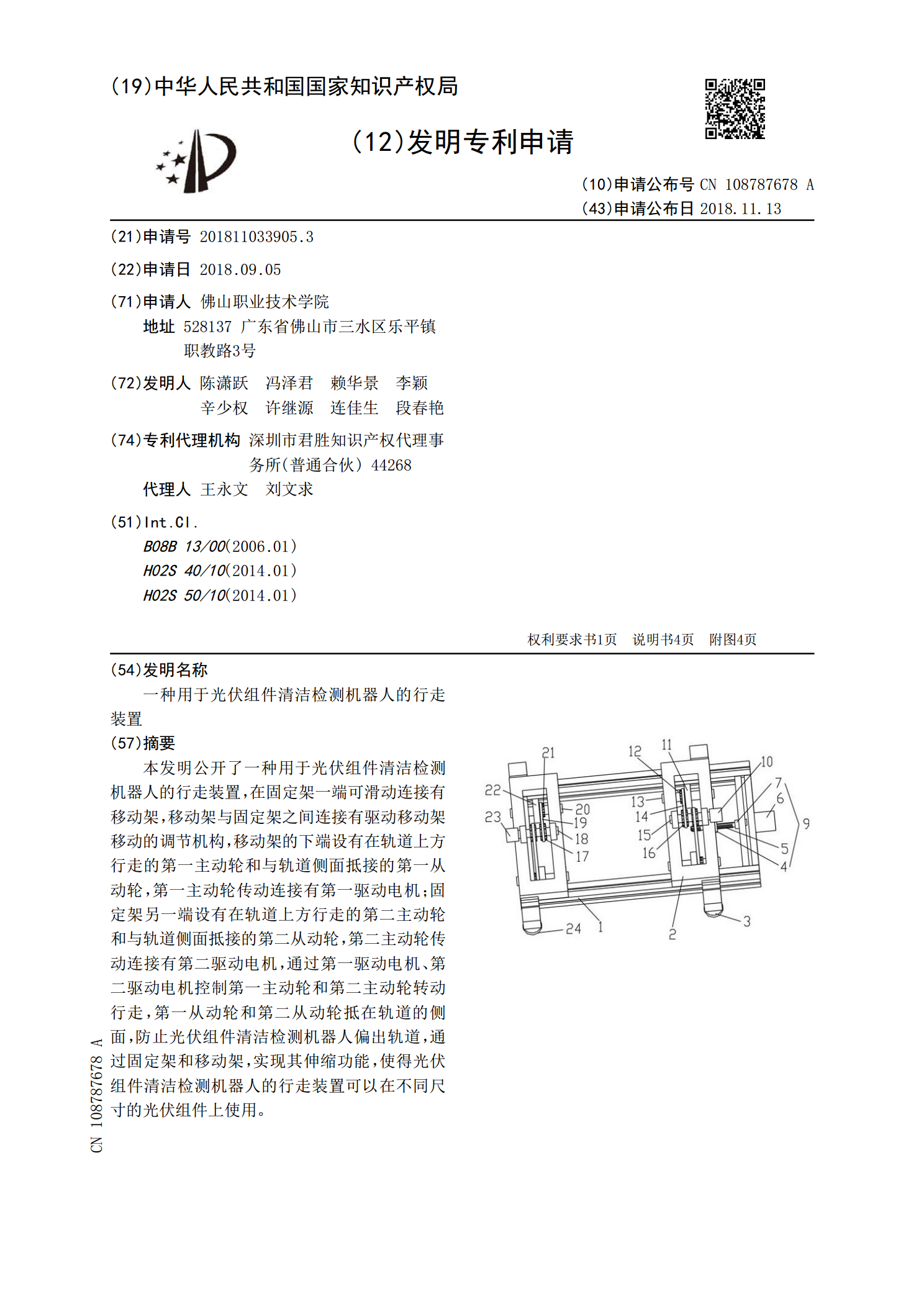
本发明公开了一种用于光伏组件清洁检测机器人的行走装置,在固定架一端可滑动连接有移动架,移动架与固定架之间连接有驱动移动架移动的调节机构,移动架的下端设有在轨道上方行走的第一主动轮和与轨道侧面抵接的第一从动轮,第一主动轮传动连接有第一驱动电机;固定架另一端设有在轨道上方行走的第二主动轮和与轨道侧面抵接的第二从动轮,第二主动轮传动连接有第二驱动电机,通过第一驱动电机、第二驱动电机控制第一主动轮和第二主动轮转动行走,第一从动轮和第二从动轮抵在轨道的侧面,防止光伏组件清洁检测机器人偏出轨道,通过固定架和移动架,实
一种光伏清洁机器人.pdf
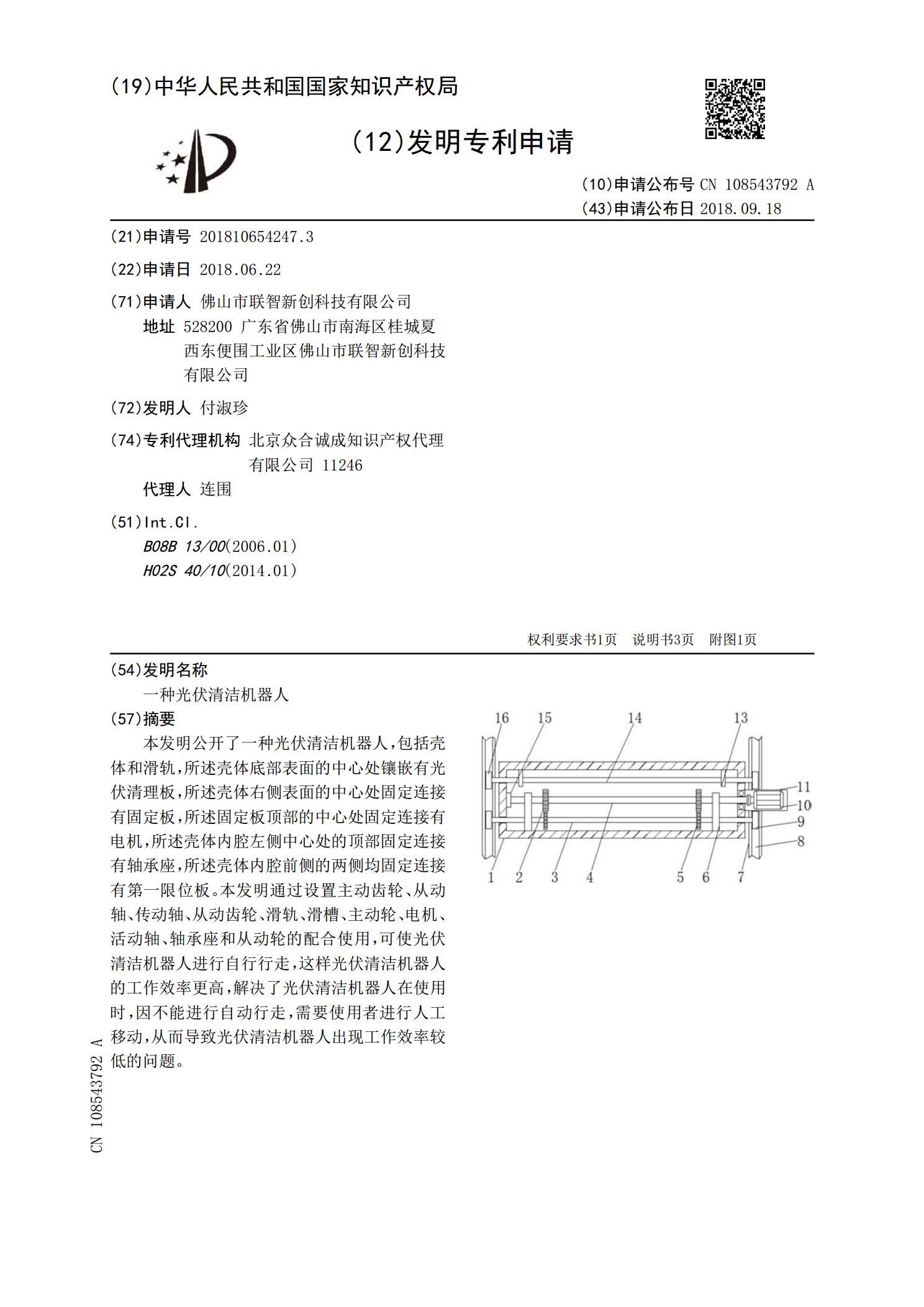
本发明公开了一种光伏清洁机器人,包括壳体和滑轨,所述壳体底部表面的中心处镶嵌有光伏清理板,所述壳体右侧表面的中心处固定连接有固定板,所述固定板顶部的中心处固定连接有电机,所述壳体内腔左侧中心处的顶部固定连接有轴承座,所述壳体内腔前侧的两侧均固定连接有第一限位板。本发明通过设置主动齿轮、从动轴、传动轴、从动齿轮、滑轨、滑槽、主动轮、电机、活动轴、轴承座和从动轮的配合使用,可使光伏清洁机器人进行自行行走,这样光伏清洁机器人的工作效率更高,解决了光伏清洁机器人在使用时,因不能进行自动行走,需要使用者进行人工移动
一种在光伏板阵列上的清洁装置行走系统.pdf
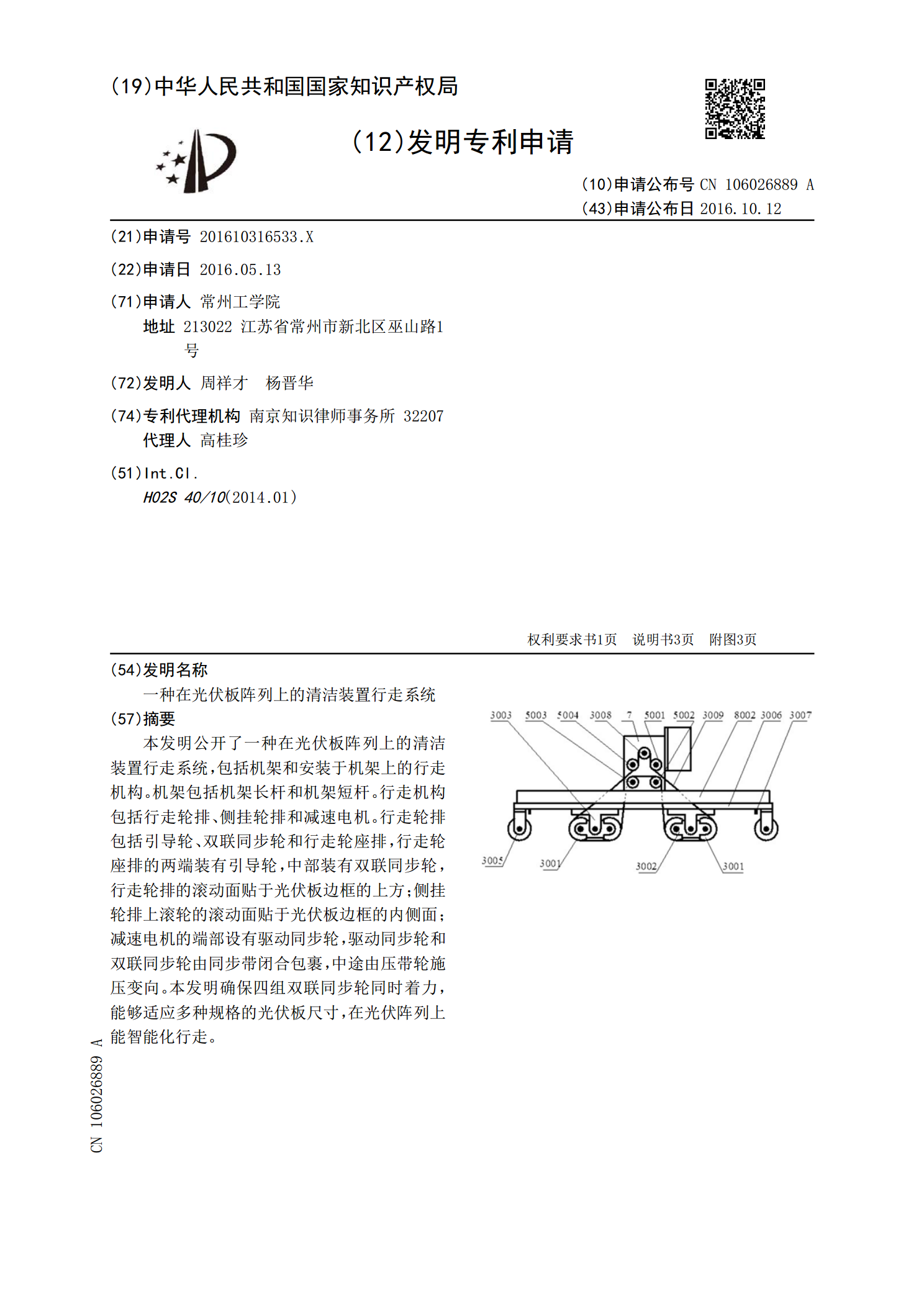
本发明公开了一种在光伏板阵列上的清洁装置行走系统,包括机架和安装于机架上的行走机构。机架包括机架长杆和机架短杆。行走机构包括行走轮排、侧挂轮排和减速电机。行走轮排包括引导轮、双联同步轮和行走轮座排,行走轮座排的两端装有引导轮,中部装有双联同步轮,行走轮排的滚动面贴于光伏板边框的上方;侧挂轮排上滚轮的滚动面贴于光伏板边框的内侧面;减速电机的端部设有驱动同步轮,驱动同步轮和双联同步轮由同步带闭合包裹,中途由压带轮施压变向。本发明确保四组双联同步轮同时着力,能够适应多种规格的光伏板尺寸,在光伏阵列上能智能化行走