
一种用于光伏组件清洁检测机器人的行走装置.pdf

是雁****找我

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种用于光伏组件清洁检测机器人的行走装置.pdf
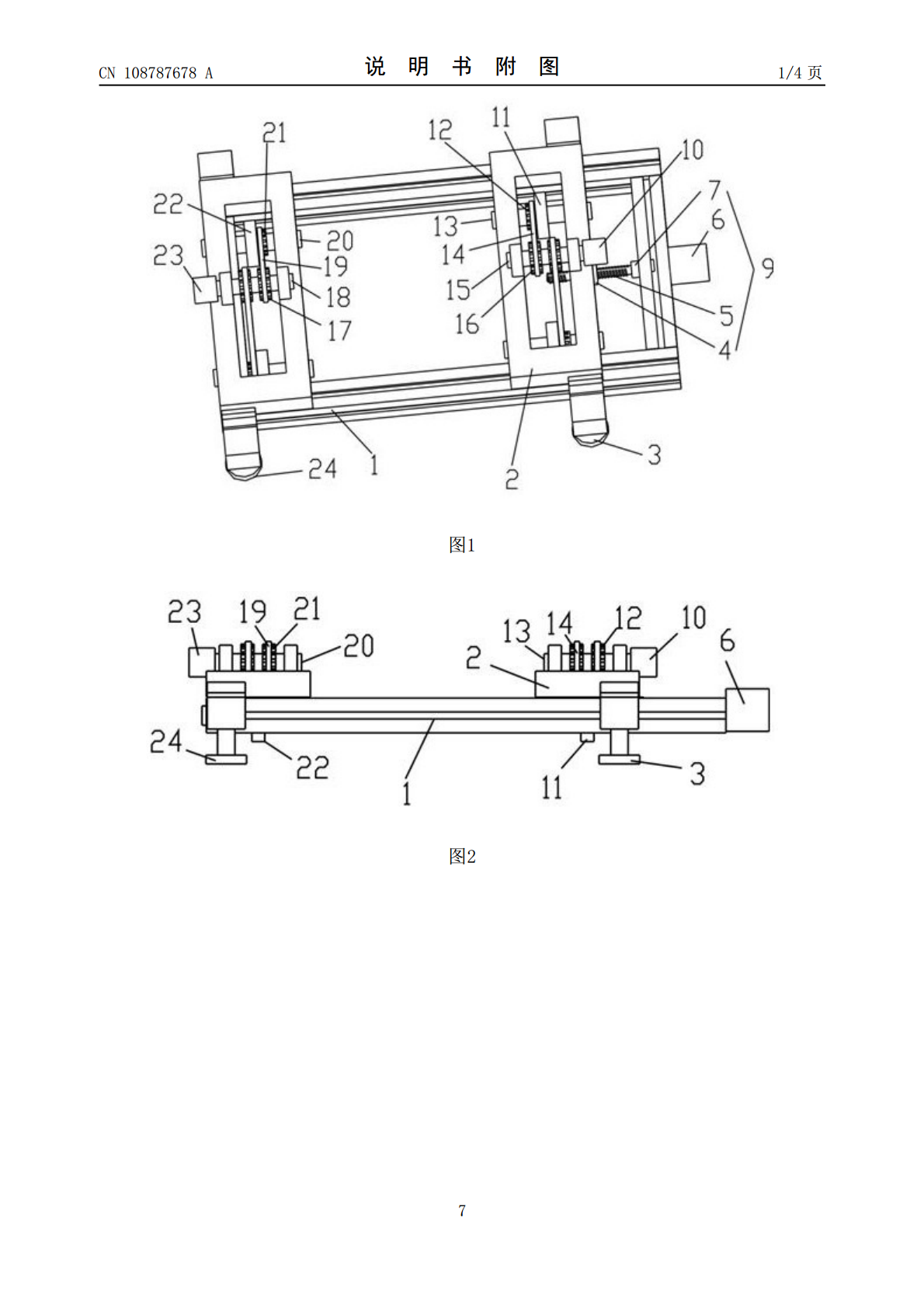
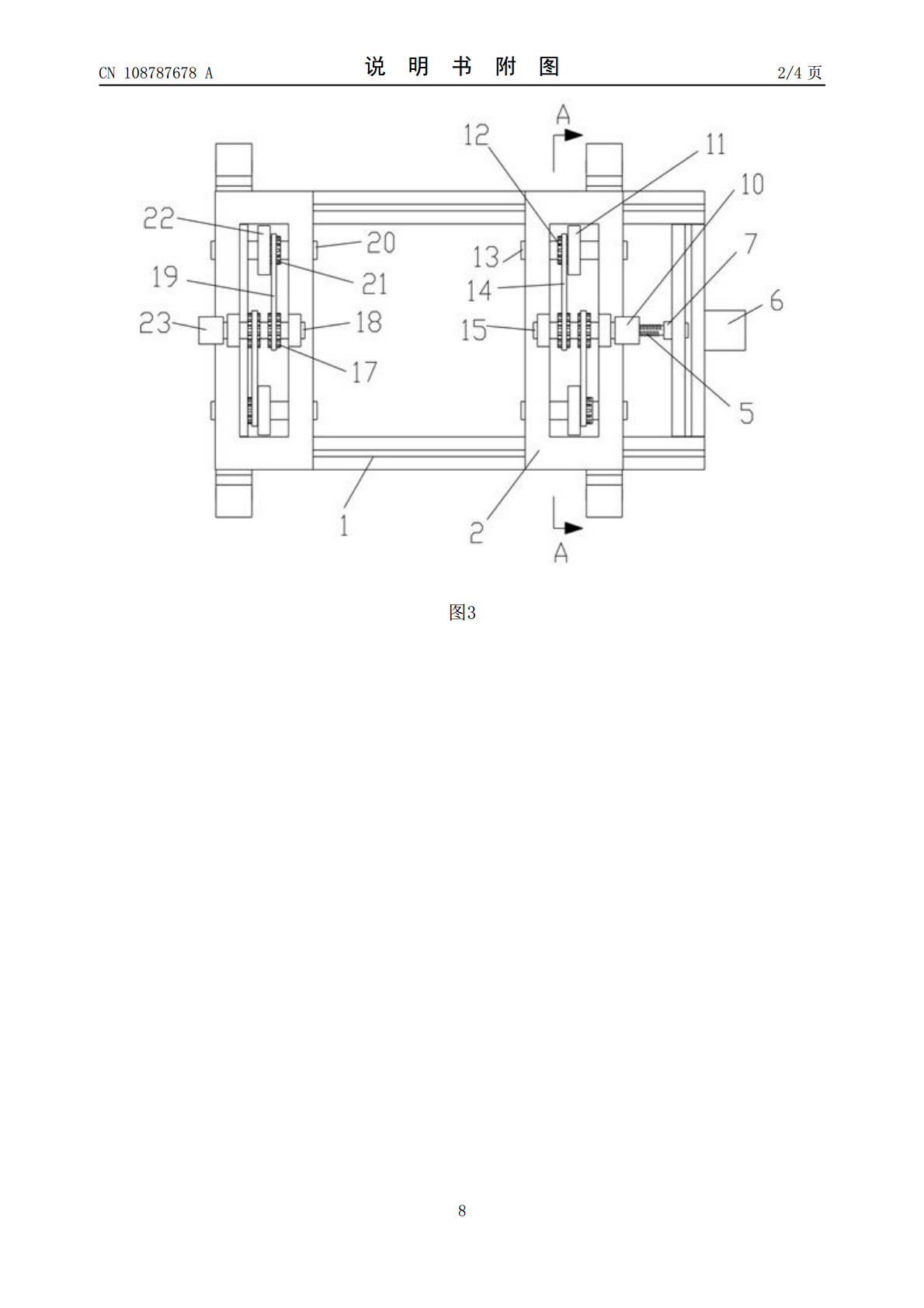
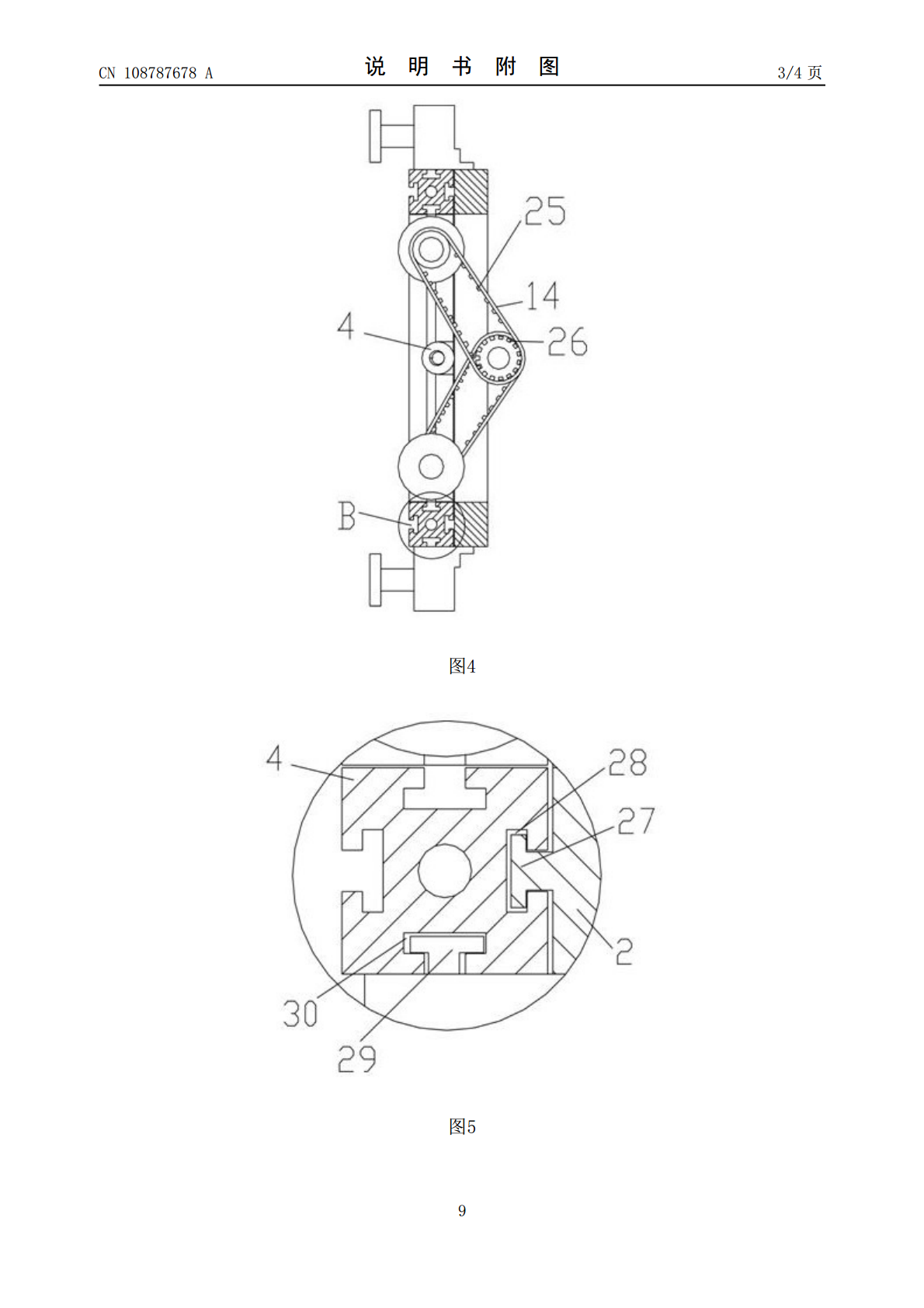
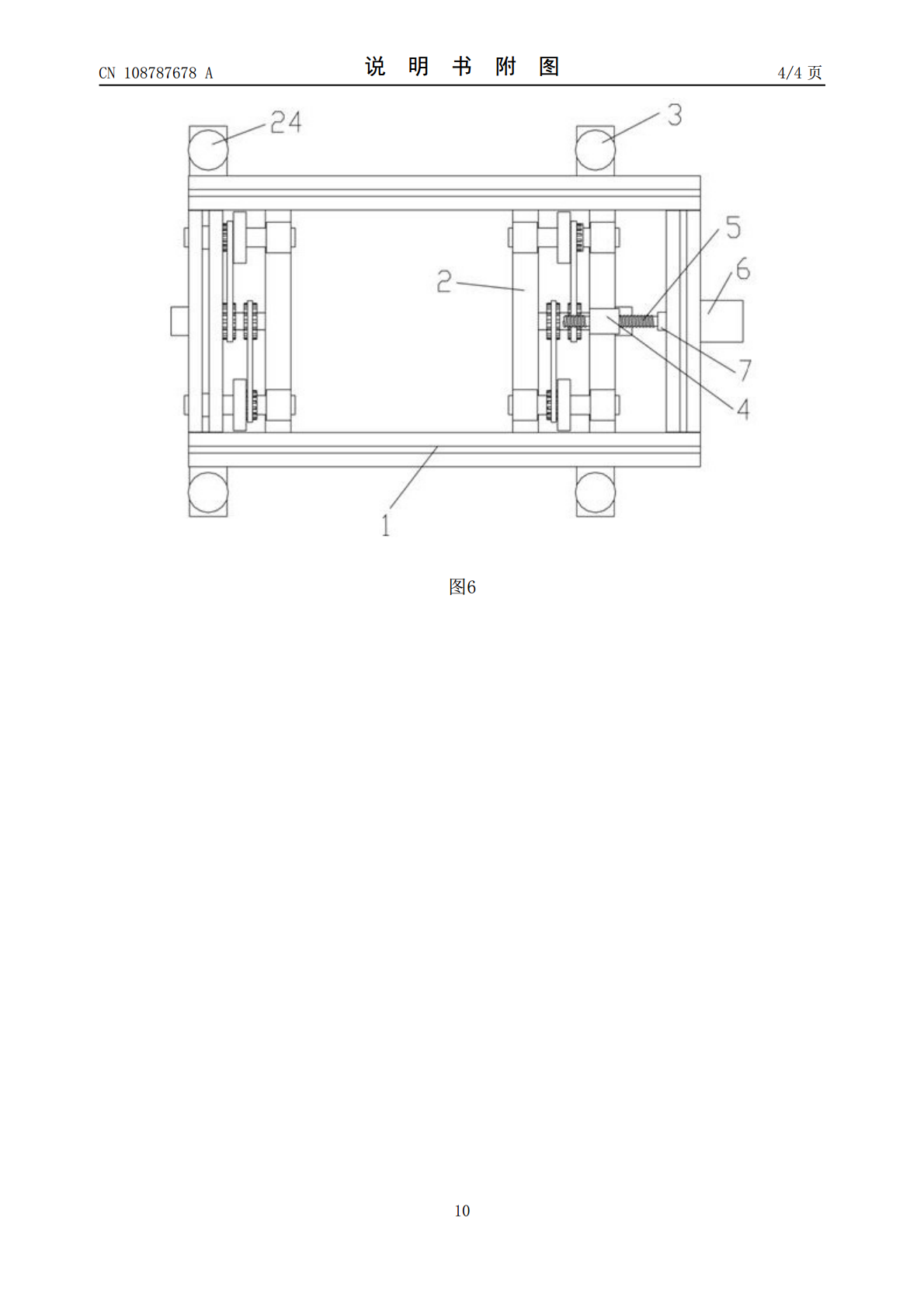
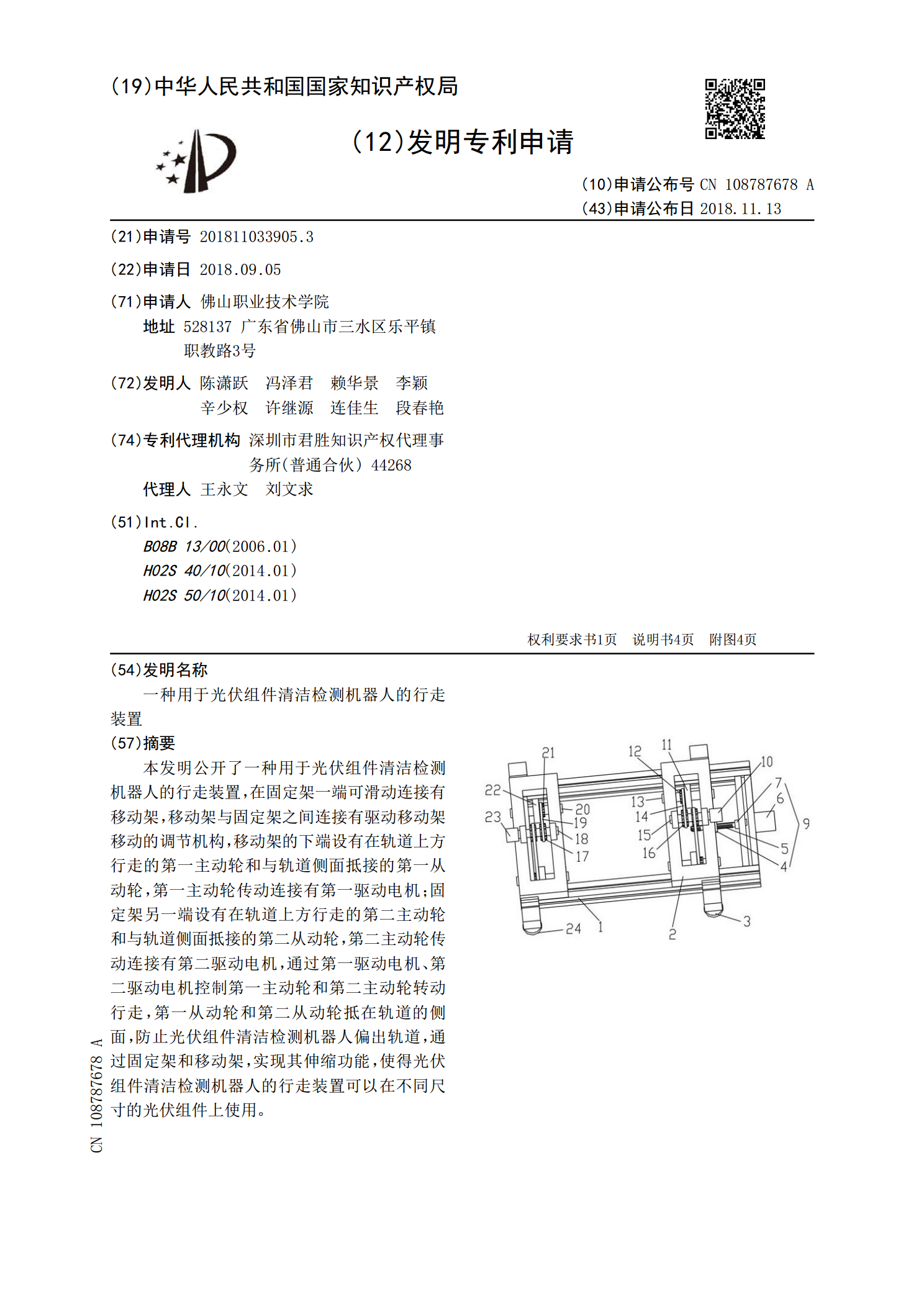
本发明公开了一种用于光伏组件清洁检测机器人的行走装置,在固定架一端可滑动连接有移动架,移动架与固定架之间连接有驱动移动架移动的调节机构,移动架的下端设有在轨道上方行走的第一主动轮和与轨道侧面抵接的第一从动轮,第一主动轮传动连接有第一驱动电机;固定架另一端设有在轨道上方行走的第二主动轮和与轨道侧面抵接的第二从动轮,第二主动轮传动连接有第二驱动电机,通过第一驱动电机、第二驱动电机控制第一主动轮和第二主动轮转动行走,第一从动轮和第二从动轮抵在轨道的侧面,防止光伏组件清洁检测机器人偏出轨道,通过固定架和移动架,实
用于光伏板清洁的清洁行走装置、过坡控制组件及光伏阵列.pdf
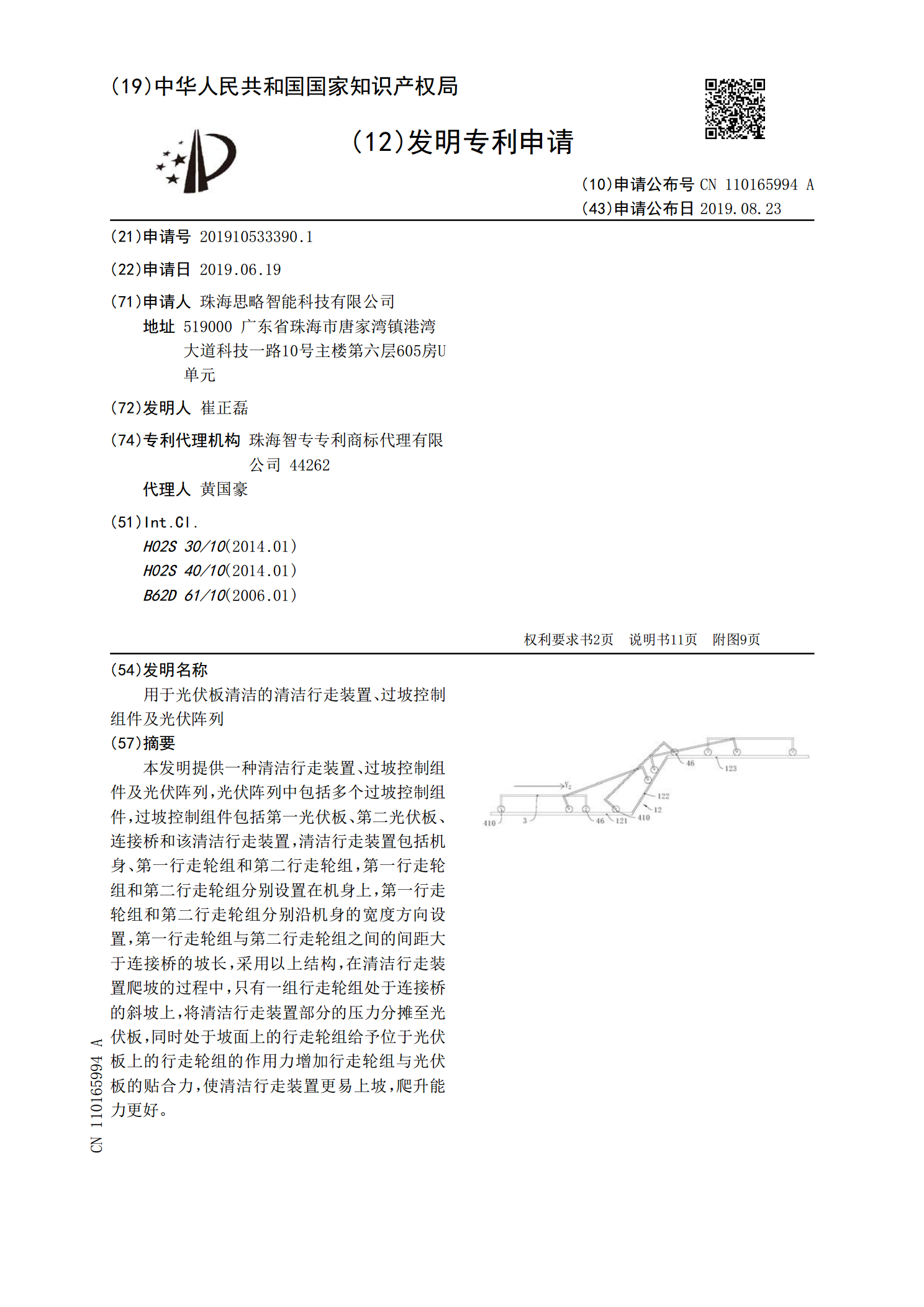
本发明提供一种清洁行走装置、过坡控制组件及光伏阵列,光伏阵列中包括多个过坡控制组件,过坡控制组件包括第一光伏板、第二光伏板、连接桥和该清洁行走装置,清洁行走装置包括机身、第一行走轮组和第二行走轮组,第一行走轮组和第二行走轮组分别设置在机身上,第一行走轮组和第二行走轮组分别沿机身的宽度方向设置,第一行走轮组与第二行走轮组之间的间距大于连接桥的坡长,采用以上结构,在清洁行走装置爬坡的过程中,只有一组行走轮组处于连接桥的斜坡上,将清洁行走装置部分的压力分摊至光伏板,同时处于坡面上的行走轮组给予位于光伏板上的行走

行走组件及具有其的光伏组件清洁装置.pdf
本发明提供了一种行走组件及具有其的光伏组件清洁装置,行走组件包括:第一导轨(2),安装在支撑光伏组件(1)的支撑架(3)上;行走机构(10),行走机构(10)可移动地安装在第一导轨(2)上,清洁组件安装在行走组件上,行走机构(10)在第一导轨(2)上移动以使清洁组件清洁光伏组件(1)表面上的污浊。本发明的技术方案有效地解决了现有技术中光伏组件表面上的污浊影响发电效率的问题。
一种用于清洁光伏组件表面的机器人.pdf
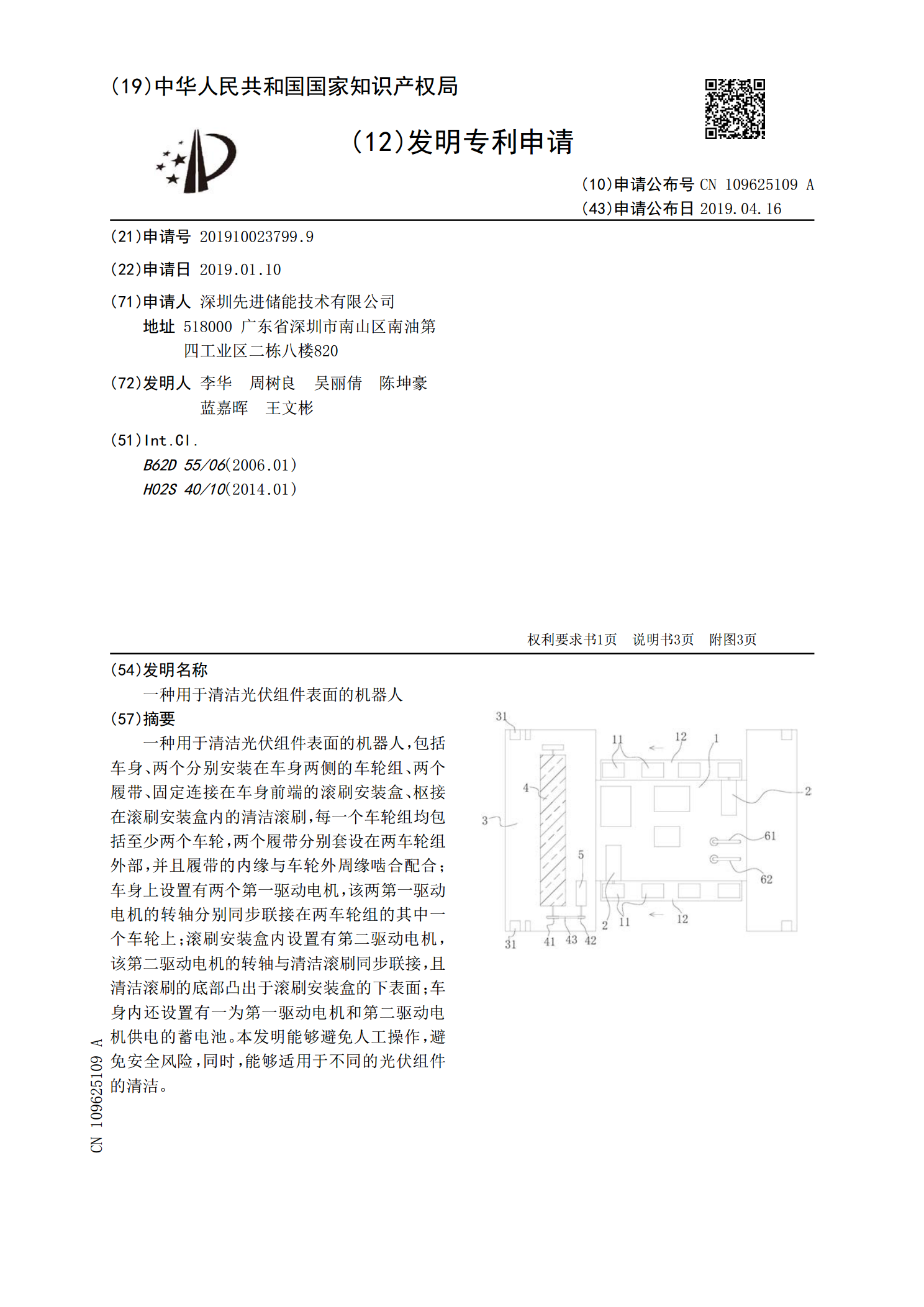
一种用于清洁光伏组件表面的机器人,包括车身、两个分别安装在车身两侧的车轮组、两个履带、固定连接在车身前端的滚刷安装盒、枢接在滚刷安装盒内的清洁滚刷,每一个车轮组均包括至少两个车轮,两个履带分别套设在两车轮组外部,并且履带的内缘与车轮外周缘啮合配合;车身上设置有两个第一驱动电机,该两第一驱动电机的转轴分别同步联接在两车轮组的其中一个车轮上;滚刷安装盒内设置有第二驱动电机,该第二驱动电机的转轴与清洁滚刷同步联接,且清洁滚刷的底部凸出于滚刷安装盒的下表面;车身内还设置有一为第一驱动电机和第二驱动电机供电的蓄电池

一种光伏组件清洁装置.pdf
本发明光伏组件清洁技术领域,公开了一种光伏组件清洁装置。包括主刷、轨道、托举架和电机,其中,托举架固定设置于光伏组件的外部,与光伏组件处于同一平面内,与光伏组件的支撑结构固定连接,托举架的四周对称设置有若干滑轮;电机固定设置于光伏组件的支撑结构上,位于光伏组件的一侧,与外部控制单元和外部电源电连接,电机的电机轴上设置有与定滑轮同一平面和同一方向的驱动轮,在驱动轮和定滑轮上依次缠绕有牵引绳索;轨道平行设置于光伏组件的上表面,位于光伏组件正面的上部和下部,与托举架固定连接;主刷设置于光伏组件正面的正上方,主刷