
车辆高度调节设备.pdf

美丽****ka

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共43页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆高度调节设备.pdf
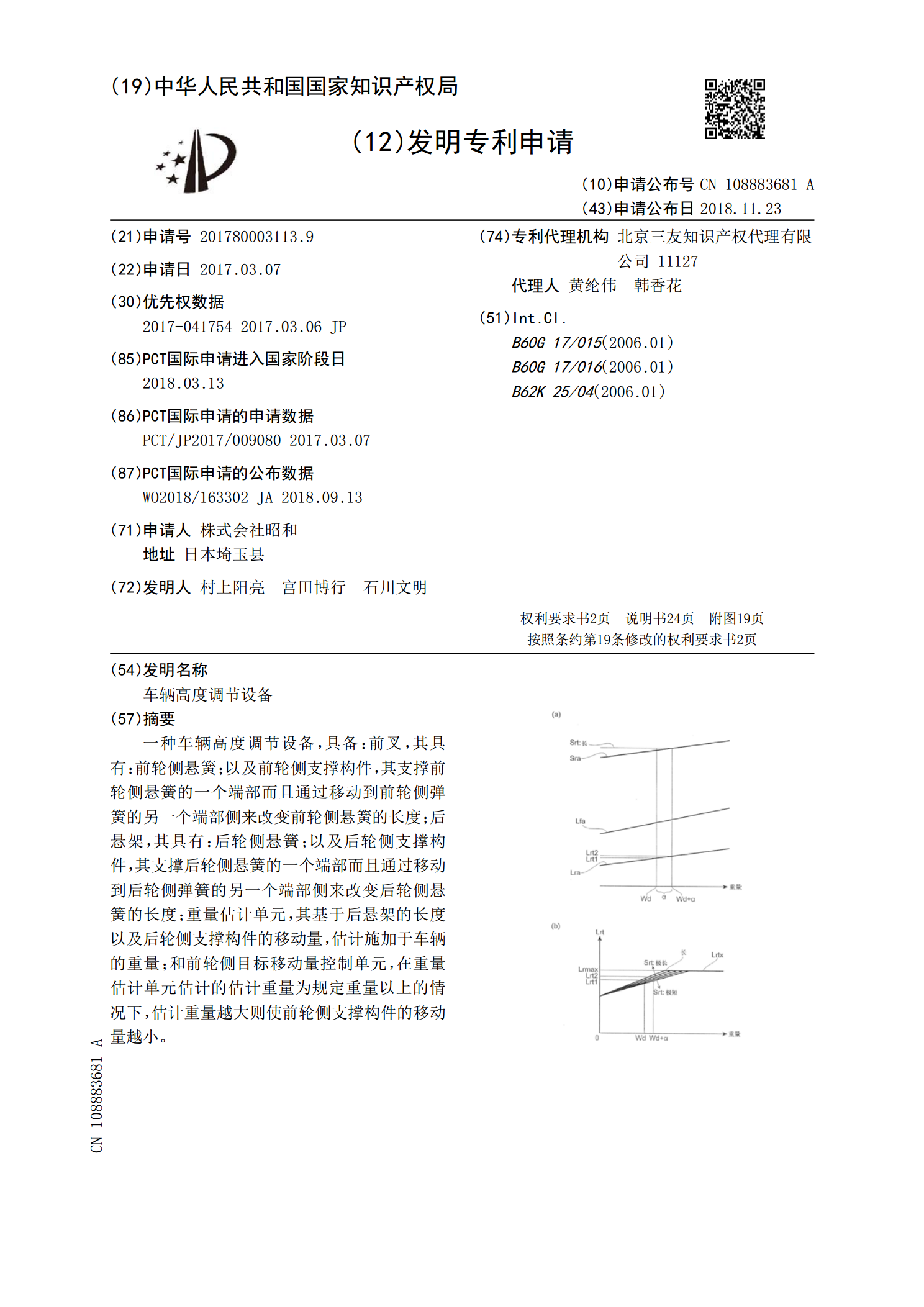
一种车辆高度调节设备,具备:前叉,其具有:前轮侧悬簧;以及前轮侧支撑构件,其支撑前轮侧悬簧的一个端部而且通过移动到前轮侧弹簧的另一个端部侧来改变前轮侧悬簧的长度;后悬架,其具有:后轮侧悬簧;以及后轮侧支撑构件,其支撑后轮侧悬簧的一个端部而且通过移动到后轮侧弹簧的另一个端部侧来改变后轮侧悬簧的长度;重量估计单元,其基于后悬架的长度以及后轮侧支撑构件的移动量,估计施加于车辆的重量;和前轮侧目标移动量控制单元,在重量估计单元估计的估计重量为规定重量以上的情况下,估计重量越大则使前轮侧支撑构件的移动量越小。
车辆高度调节设备.pdf
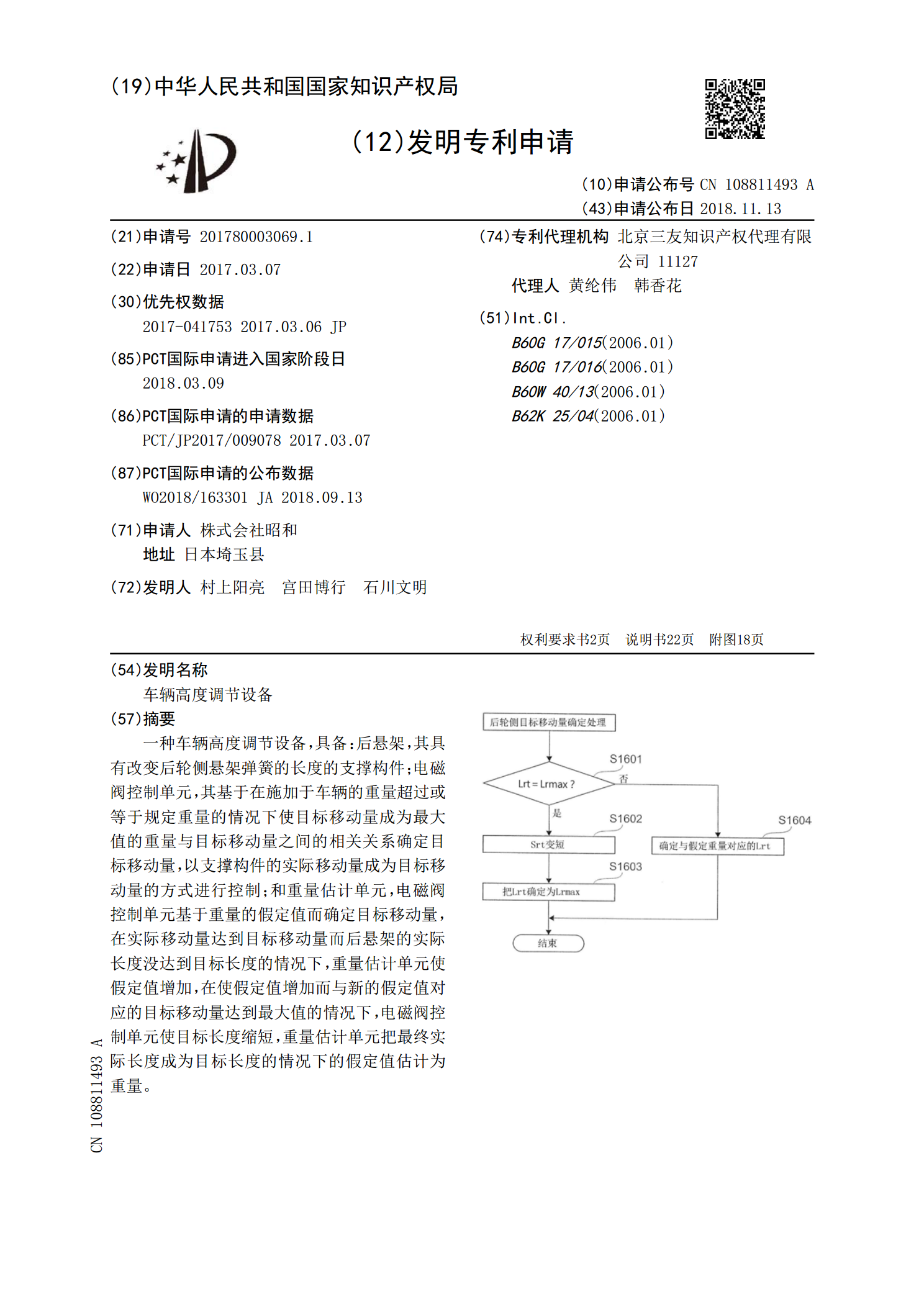
一种车辆高度调节设备,具备:后悬架,其具有改变后轮侧悬架弹簧的长度的支撑构件;电磁阀控制单元,其基于在施加于车辆的重量超过或等于规定重量的情况下使目标移动量成为最大值的重量与目标移动量之间的相关关系确定目标移动量,以支撑构件的实际移动量成为目标移动量的方式进行控制;和重量估计单元,电磁阀控制单元基于重量的假定值而确定目标移动量,在实际移动量达到目标移动量而后悬架的实际长度没达到目标长度的情况下,重量估计单元使假定值增加,在使假定值增加而与新的假定值对应的目标移动量达到最大值的情况下,电磁阀控制单元使目标长

车辆高度调节设备.pdf
一种车辆高度调节设备,包括:能够改变前轮侧相对位置的前轮侧改变单元;能够改变后轮侧相对位置的后轮侧改变单元;和用于通过控制前轮侧改变单元和后轮侧改变单元从而改变前轮侧相对位置和后轮侧相对位置而调节车辆的主体的高度的控制单元,其中该控制单元以使得前轮侧相对位置的改变率和后轮侧相对位置的改变率满足预定关系的方式来控制前轮侧改变单元和后轮侧改变单元。
车辆高度调节系统.pdf
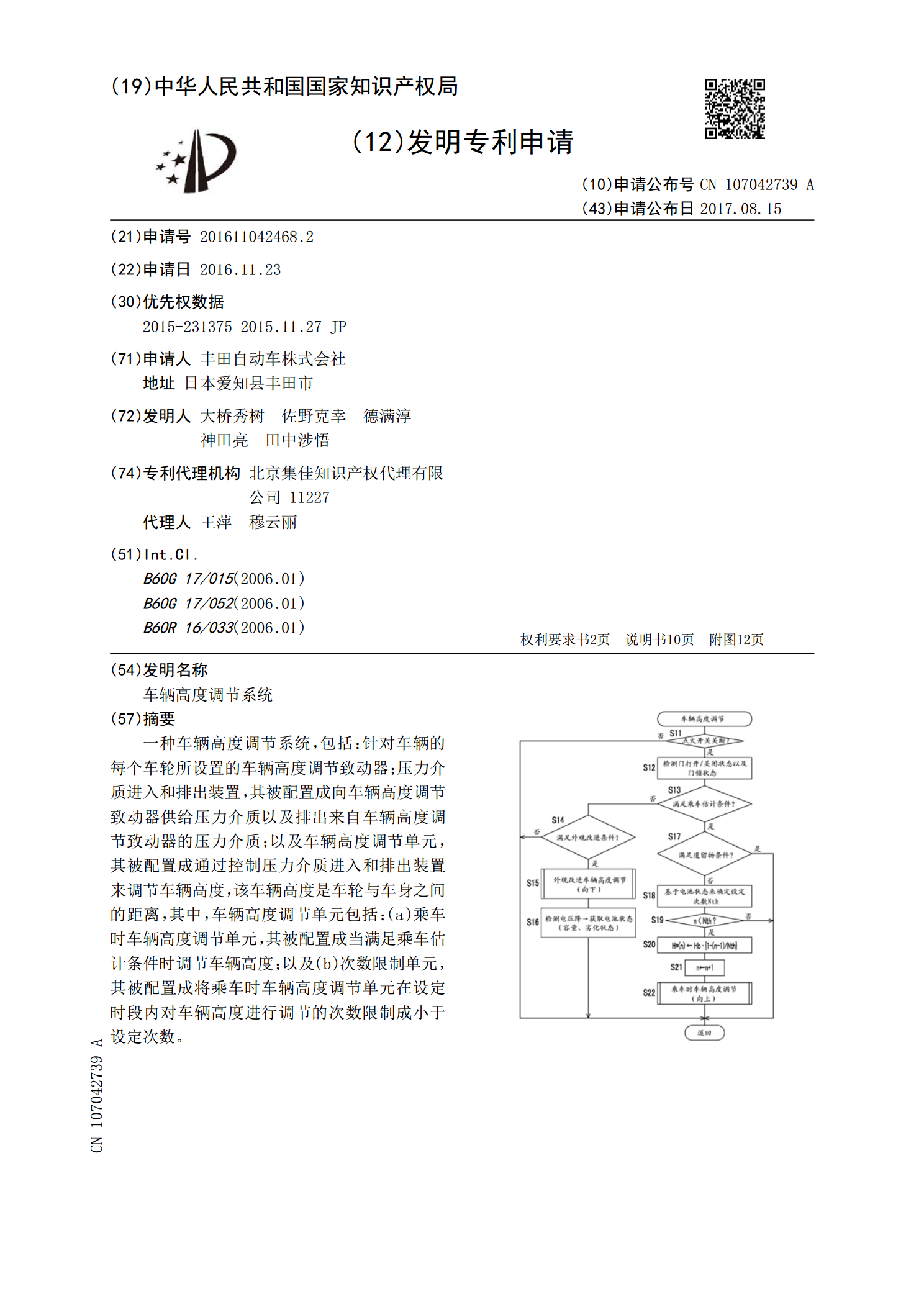
一种车辆高度调节系统,包括:针对车辆的每个车轮所设置的车辆高度调节致动器;压力介质进入和排出装置,其被配置成向车辆高度调节致动器供给压力介质以及排出来自车辆高度调节致动器的压力介质;以及车辆高度调节单元,其被配置成通过控制压力介质进入和排出装置来调节车辆高度,该车辆高度是车轮与车身之间的距离,其中,车辆高度调节单元包括:(a)乘车时车辆高度调节单元,其被配置成当满足乘车估计条件时调节车辆高度;以及(b)次数限制单元,其被配置成将乘车时车辆高度调节单元在设定时段内对车辆高度进行调节的次数限制成小于设定次数。
用于对车辆车身进行高度调节的设备.pdf
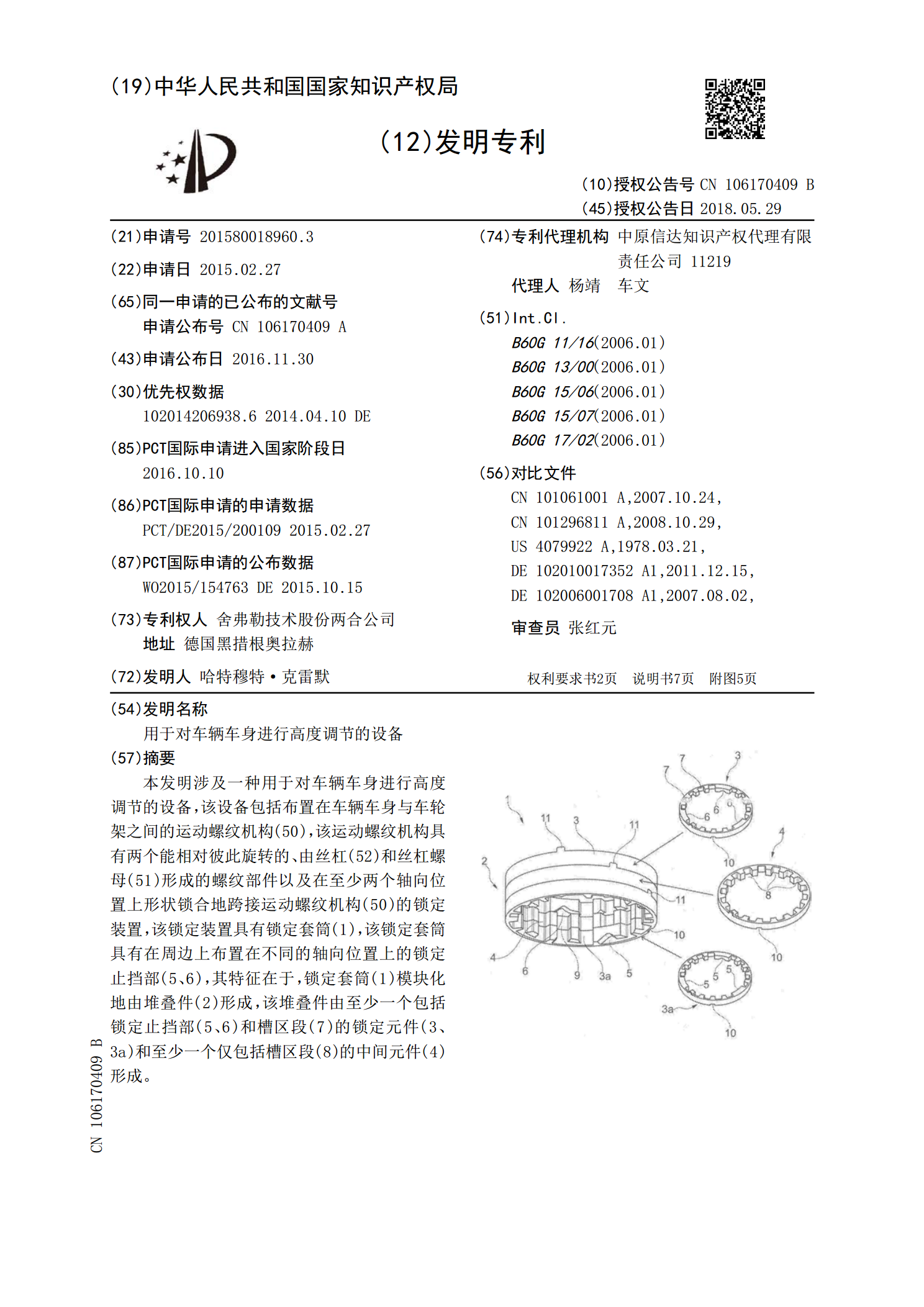
本发明涉及一种用于对车辆车身进行高度调节的设备,该设备包括布置在车辆车身与车轮架之间的运动螺纹机构(50),该运动螺纹机构具有两个能相对彼此旋转的、由丝杠(52)和丝杠螺母(51)形成的螺纹部件以及在至少两个轴向位置上形状锁合地跨接运动螺纹机构(50)的锁定装置,该锁定装置具有锁定套筒(1),该锁定套筒具有在周边上布置在不同的轴向位置上的锁定止挡部(5、6),其特征在于,锁定套筒(1)模块化地由堆叠件(2)形成,该堆叠件由至少一个包括锁定止挡部(5、6)和槽区段(7)的锁定元件(3、3a)和至少一个仅包括