
一种双轴驱动谐波减速电机.pdf

努力****元恺

1/7
2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种双轴驱动谐波减速电机.pdf
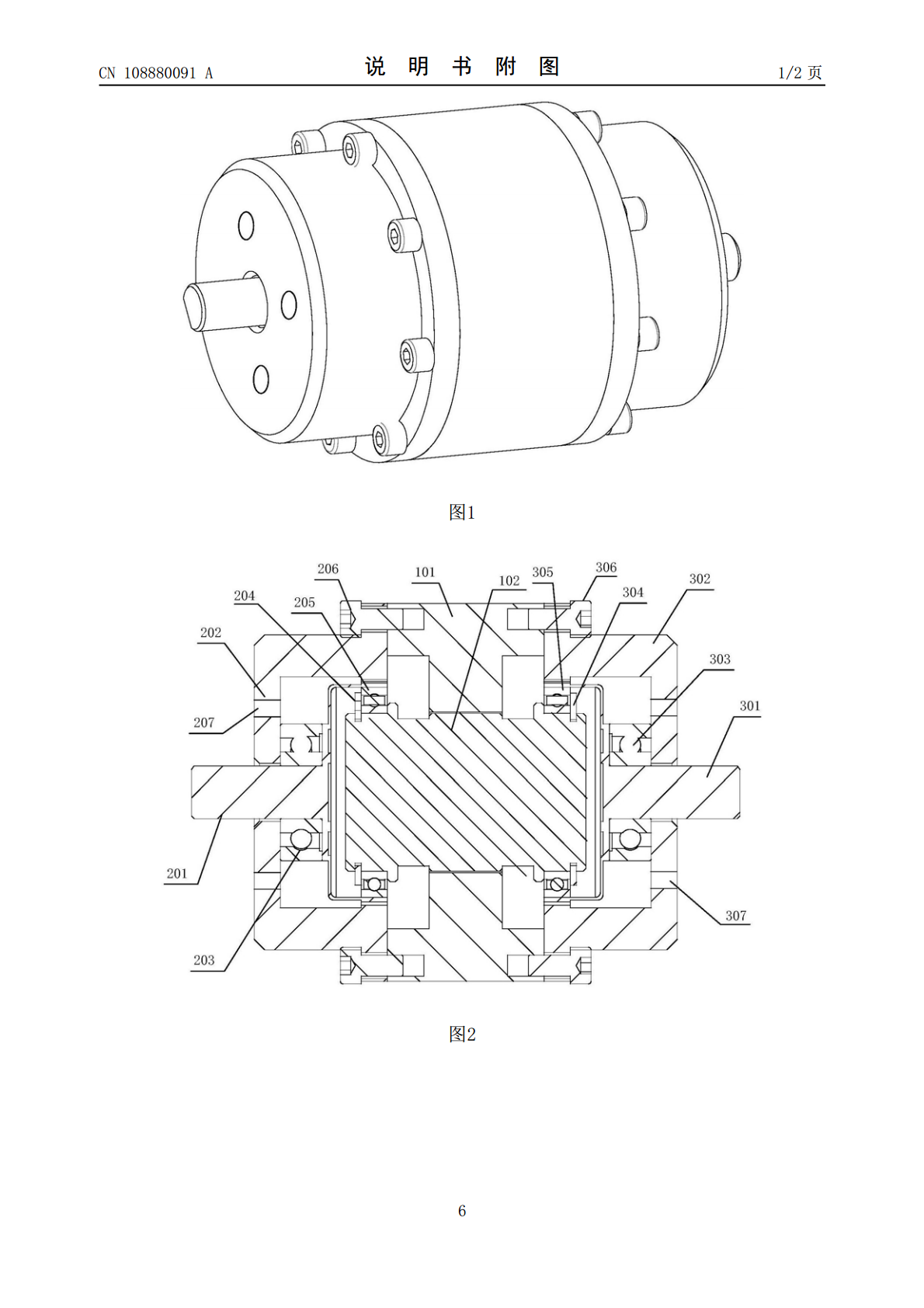
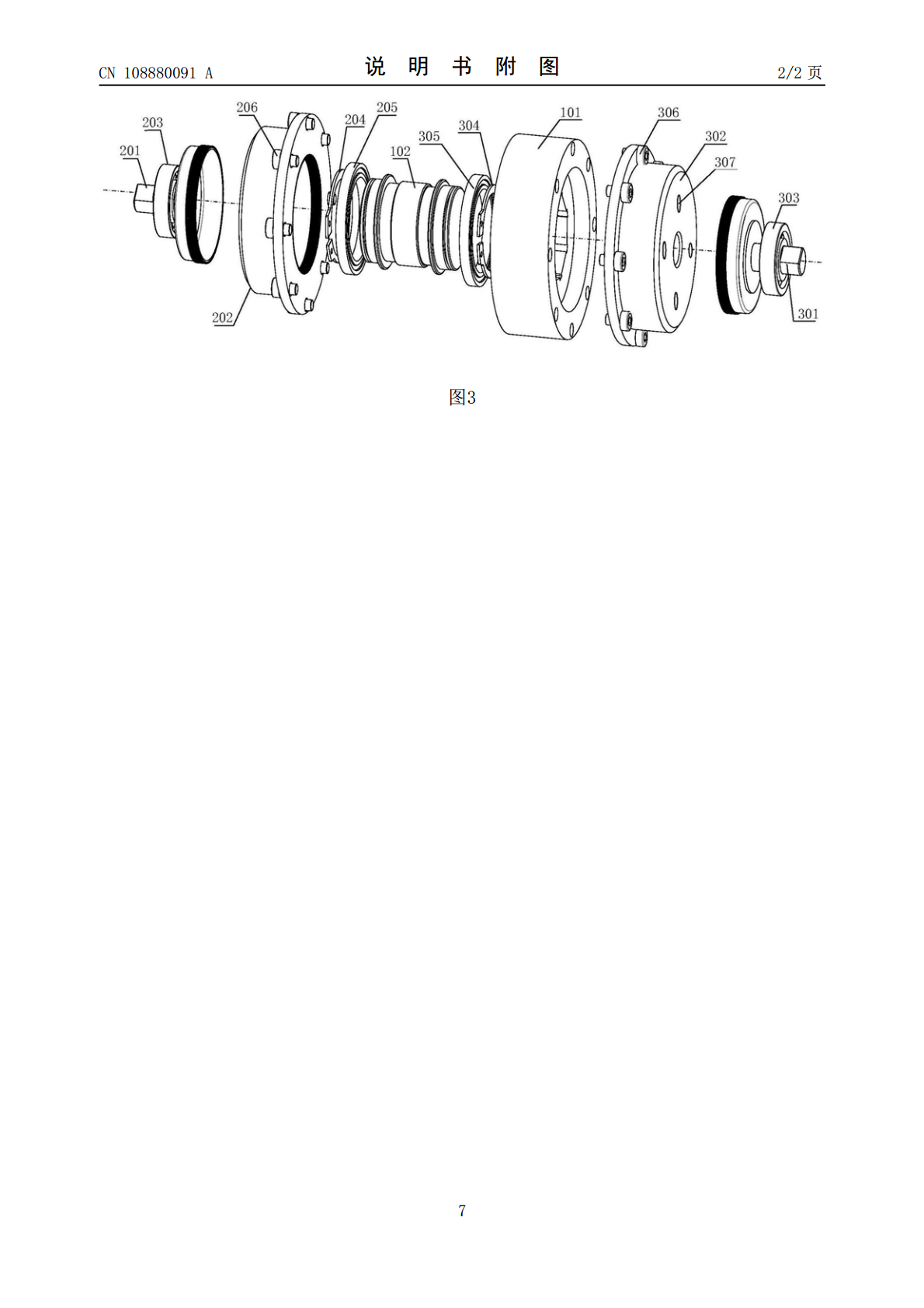
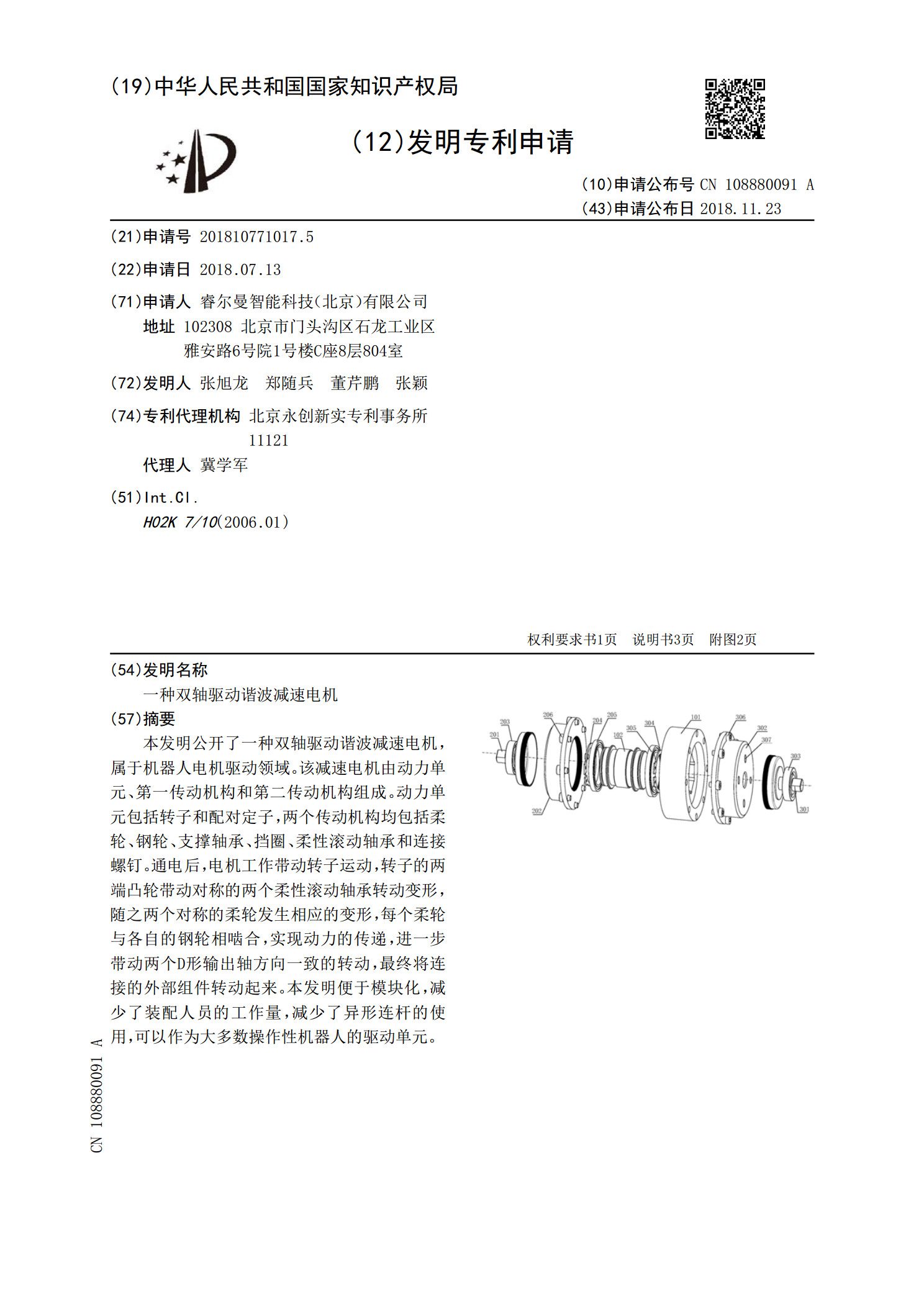
本发明公开了一种双轴驱动谐波减速电机,属于机器人电机驱动领域。该减速电机由动力单元、第一传动机构和第二传动机构组成。动力单元包括转子和配对定子,两个传动机构均包括柔轮、钢轮、支撑轴承、挡圈、柔性滚动轴承和连接螺钉。通电后,电机工作带动转子运动,转子的两端凸轮带动对称的两个柔性滚动轴承转动变形,随之两个对称的柔轮发生相应的变形,每个柔轮与各自的钢轮相啮合,实现动力的传递,进一步带动两个D形输出轴方向一致的转动,最终将连接的外部组件转动起来。本发明便于模块化,减少了装配人员的工作量,减少了异形连杆的使用,可以
一种同步化联排双轴驱动输出的减速电机.pdf
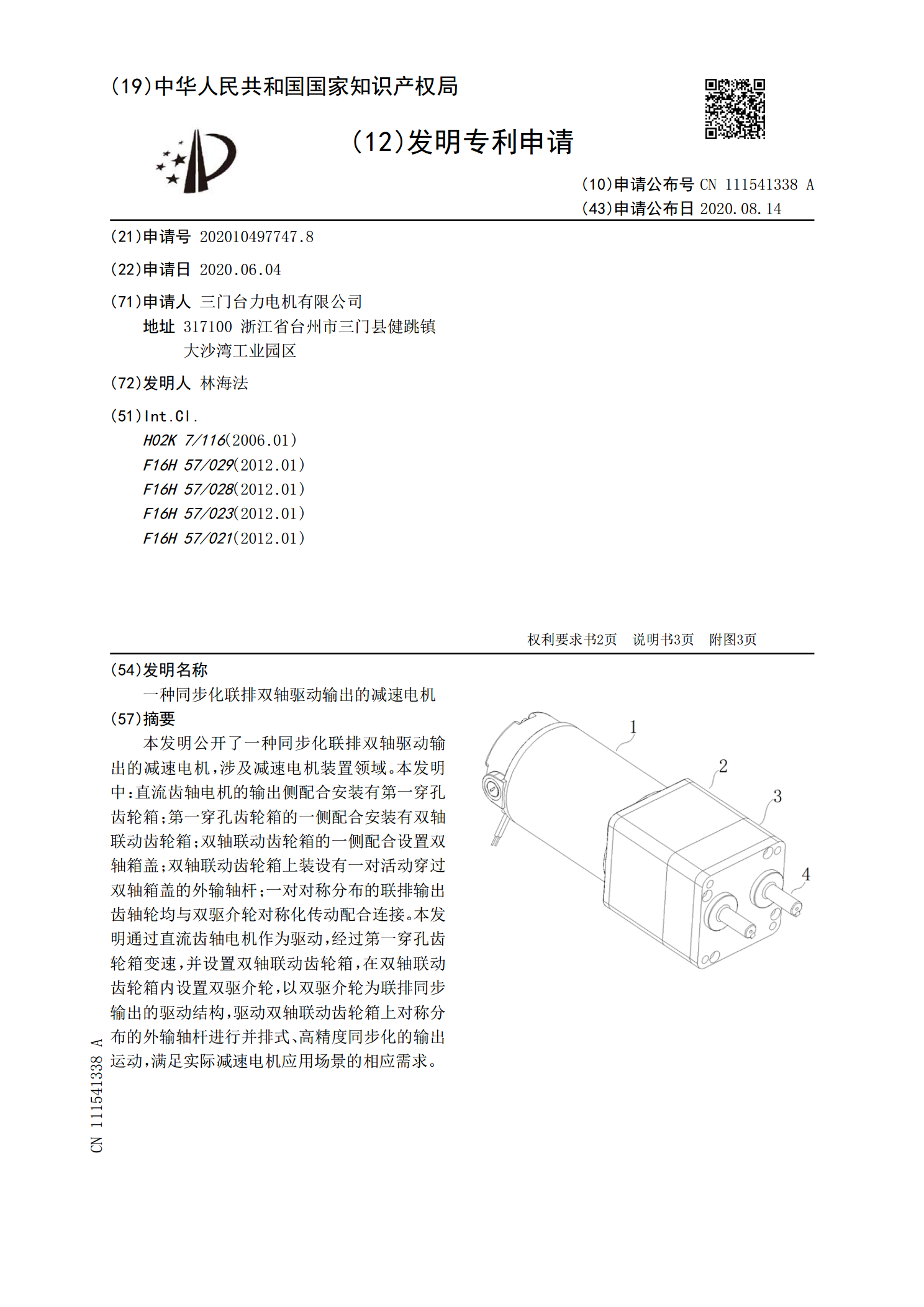
本发明公开了一种同步化联排双轴驱动输出的减速电机,涉及减速电机装置领域。本发明中:直流齿轴电机的输出侧配合安装有第一穿孔齿轮箱;第一穿孔齿轮箱的一侧配合安装有双轴联动齿轮箱;双轴联动齿轮箱的一侧配合设置双轴箱盖;双轴联动齿轮箱上装设有一对活动穿过双轴箱盖的外输轴杆;一对对称分布的联排输出齿轴轮均与双驱介轮对称化传动配合连接。本发明通过直流齿轴电机作为驱动,经过第一穿孔齿轮箱变速,并设置双轴联动齿轮箱,在双轴联动齿轮箱内设置双驱介轮,以双驱介轮为联排同步输出的驱动结构,驱动双轴联动齿轮箱上对称分布的外输轴杆
谐波减速电机驱动轮毂装置.pdf
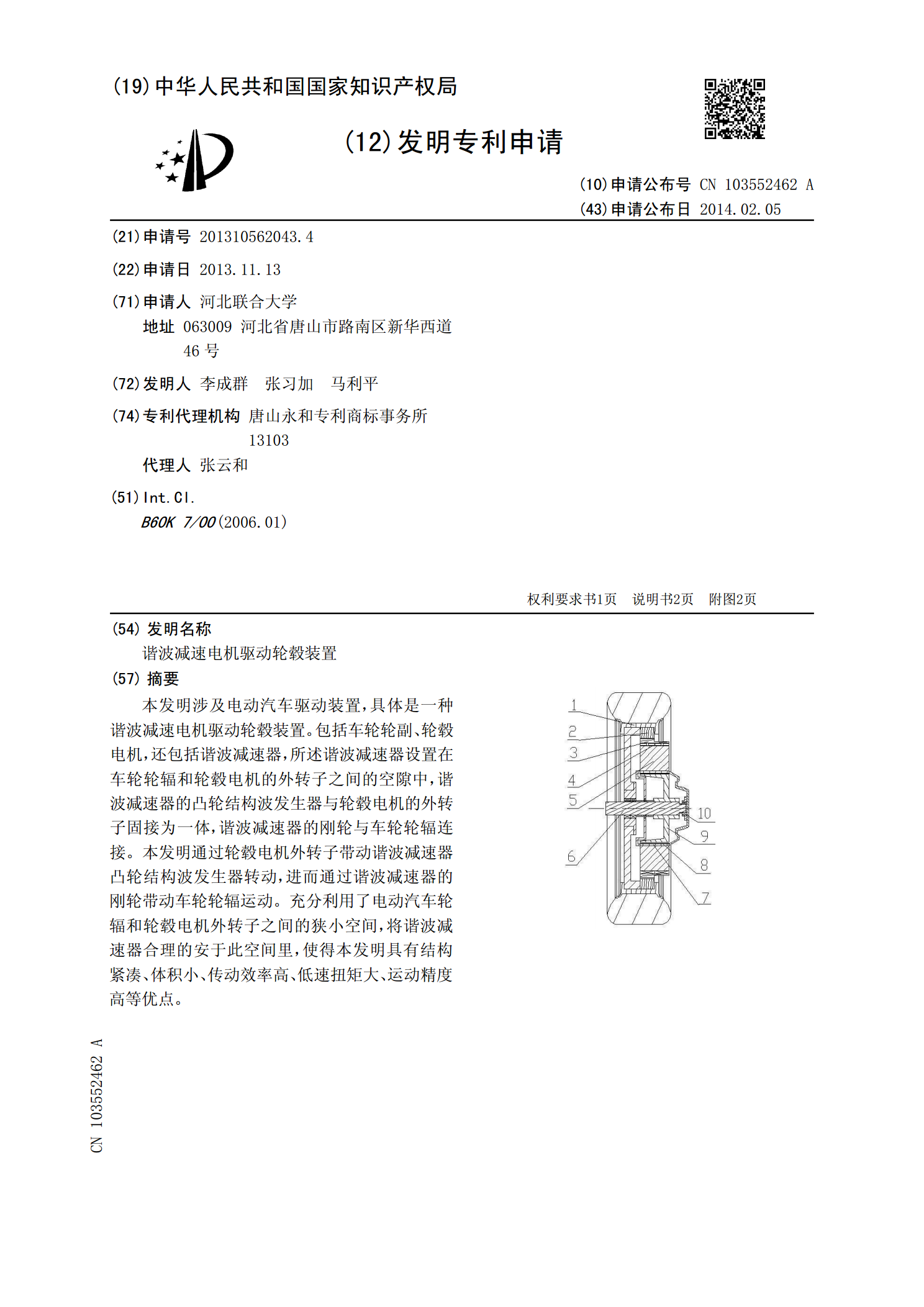
本发明涉及电动汽车驱动装置,具体是一种谐波减速电机驱动轮毂装置。包括车轮轮副、轮毂电机,还包括谐波减速器,所述谐波减速器设置在车轮轮辐和轮毂电机的外转子之间的空隙中,谐波减速器的凸轮结构波发生器与轮毂电机的外转子固接为一体,谐波减速器的刚轮与车轮轮辐连接。本发明通过轮毂电机外转子带动谐波减速器凸轮结构波发生器转动,进而通过谐波减速器的刚轮带动车轮轮辐运动。充分利用了电动汽车轮辐和轮毂电机外转子之间的狭小空间,将谐波减速器合理的安于此空间里,使得本发明具有结构紧凑、体积小、传动效率高、低速扭矩大、运动精度高
双电机减速驱动模块.pdf
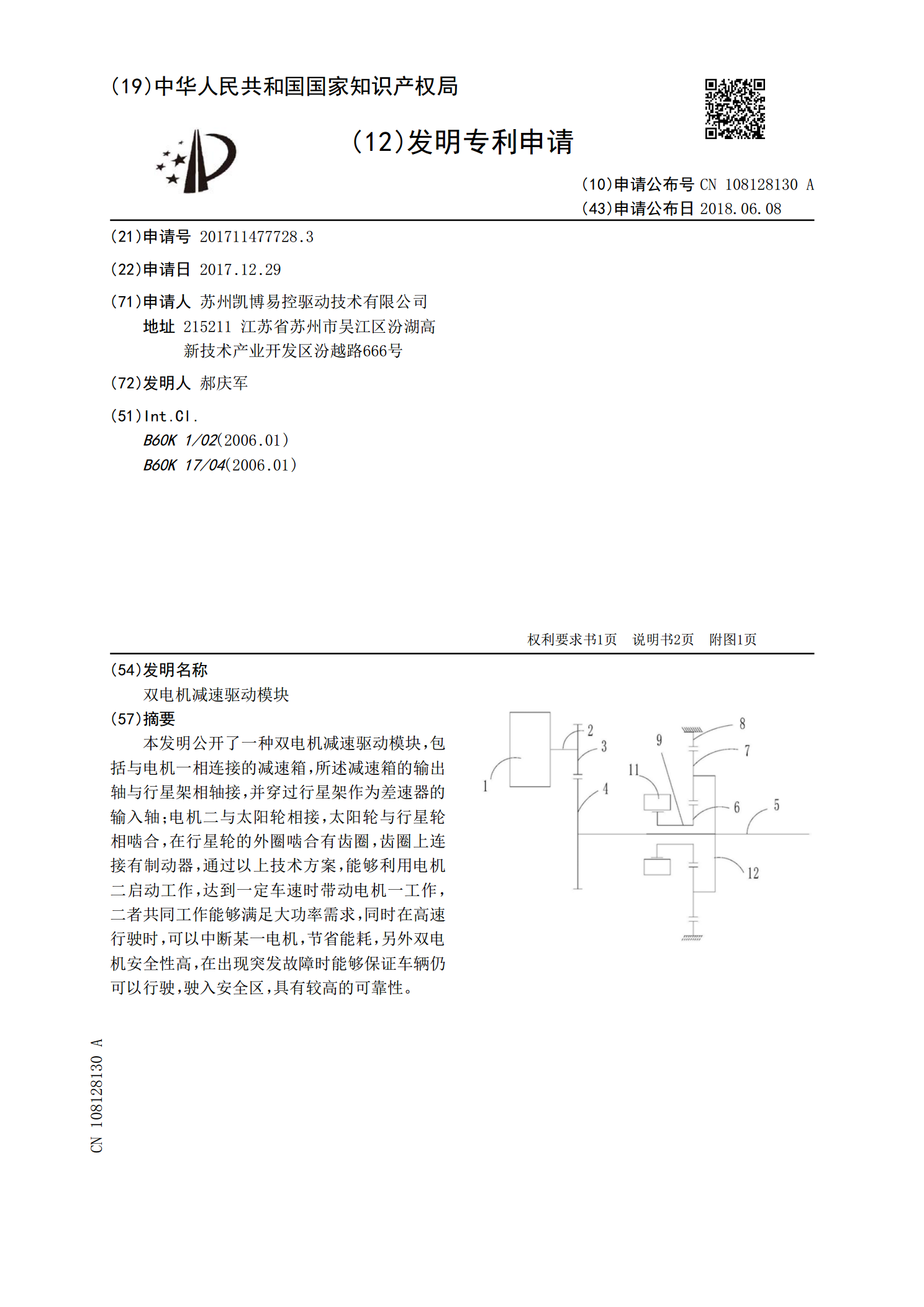
本发明公开了一种双电机减速驱动模块,包括与电机一相连接的减速箱,所述减速箱的输出轴与行星架相轴接,并穿过行星架作为差速器的输入轴;电机二与太阳轮相接,太阳轮与行星轮相啮合,在行星轮的外圈啮合有齿圈,齿圈上连接有制动器,通过以上技术方案,能够利用电机二启动工作,达到一定车速时带动电机一工作,二者共同工作能够满足大功率需求,同时在高速行驶时,可以中断某一电机,节省能耗,另外双电机安全性高,在出现突发故障时能够保证车辆仍可以行驶,驶入安全区,具有较高的可靠性。
一种双出轴航模无刷电机的减速装置及减速方法.pdf
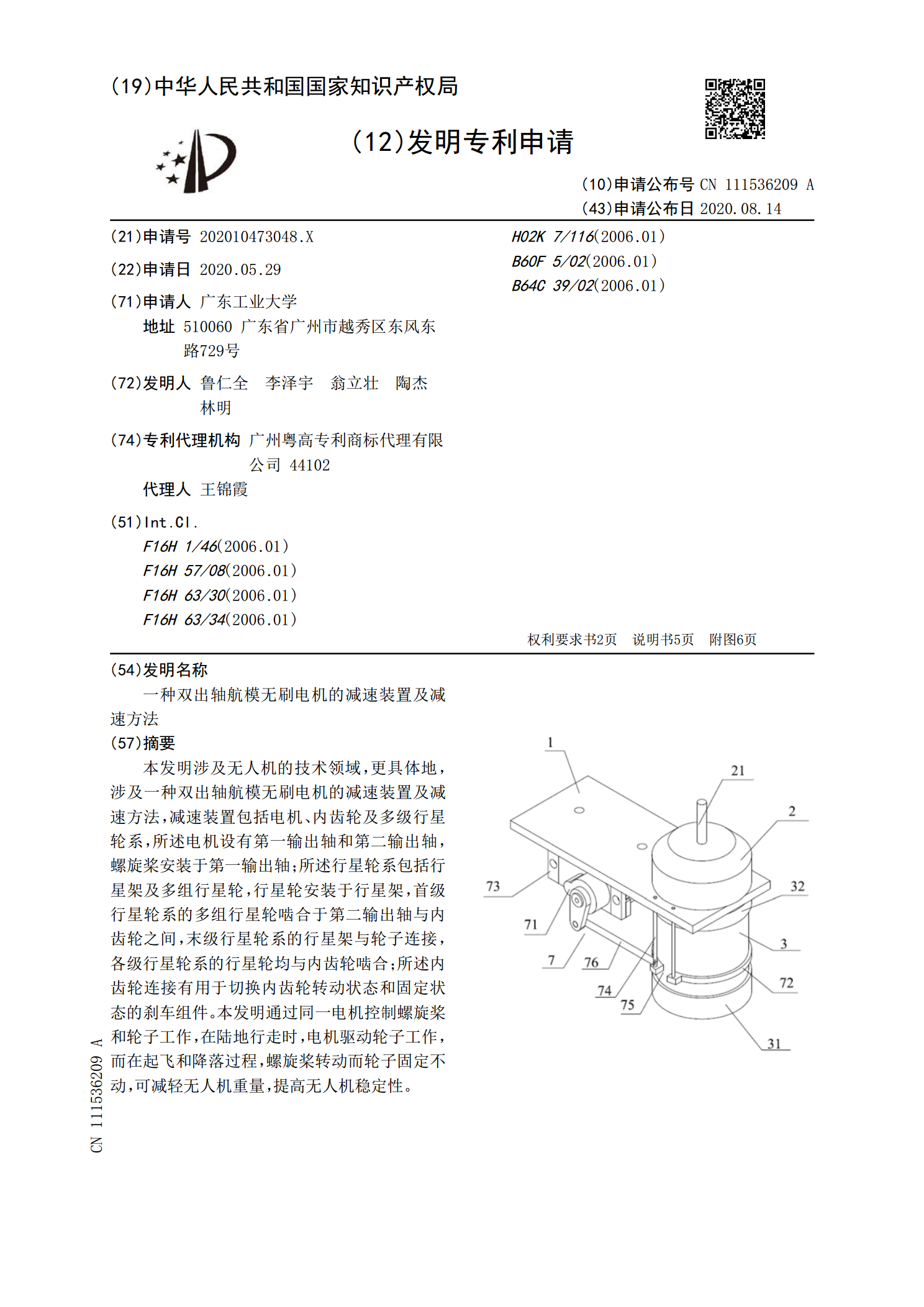
本发明涉及无人机的技术领域,更具体地,涉及一种双出轴航模无刷电机的减速装置及减速方法,减速装置包括电机、内齿轮及多级行星轮系,所述电机设有第一输出轴和第二输出轴,螺旋桨安装于第一输出轴;所述行星轮系包括行星架及多组行星轮,行星轮安装于行星架,首级行星轮系的多组行星轮啮合于第二输出轴与内齿轮之间,末级行星轮系的行星架与轮子连接,各级行星轮系的行星轮均与内齿轮啮合;所述内齿轮连接有用于切换内齿轮转动状态和固定状态的刹车组件。本发明通过同一电机控制螺旋桨和轮子工作,在陆地行走时,电机驱动轮子工作,而在起飞和降落