
一种水下机器人柔性抓取装置及其方法.pdf

雨巷****怡轩


1/10
2/10

3/10
4/10
5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种水下机器人柔性抓取装置及其方法.pdf
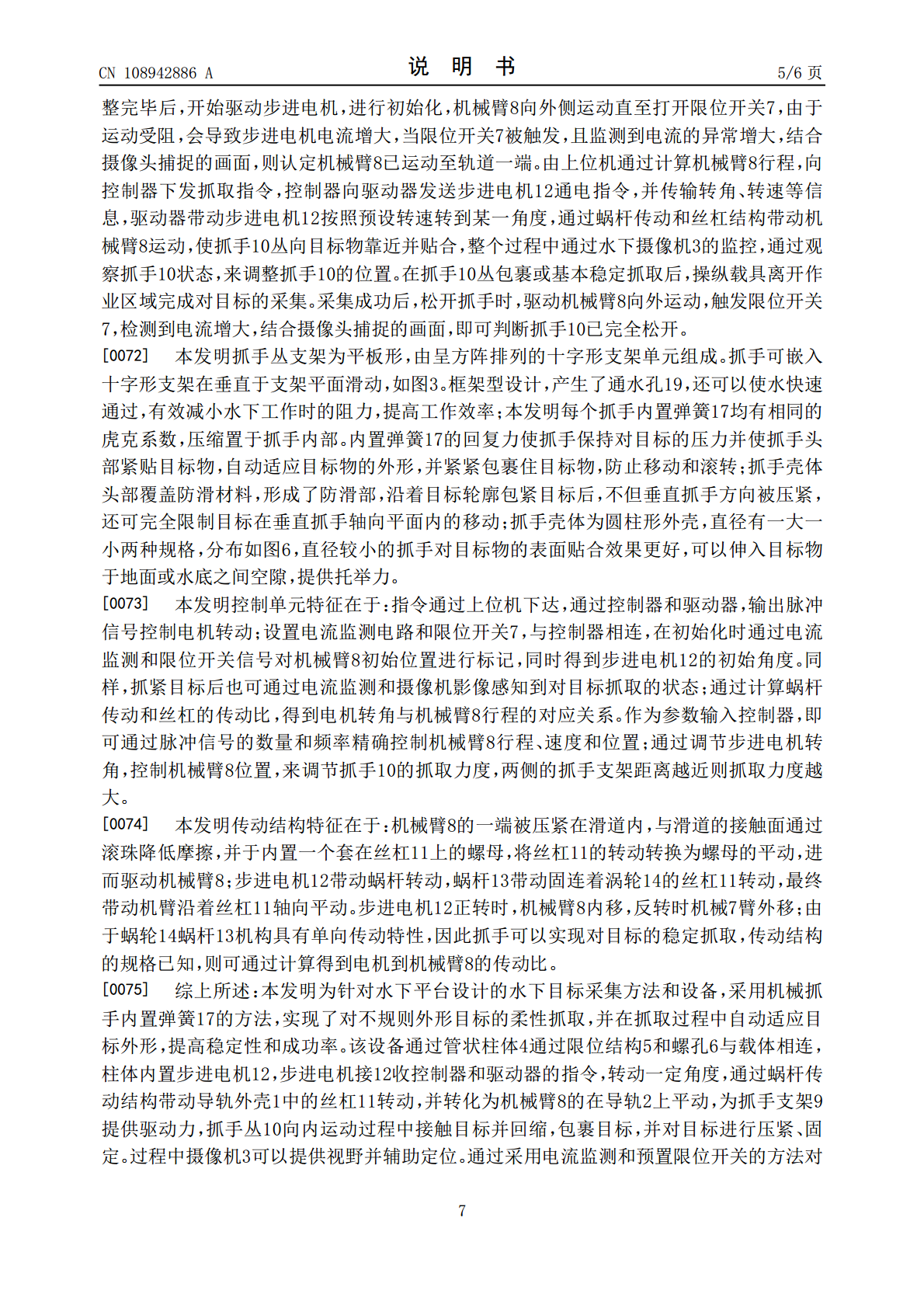
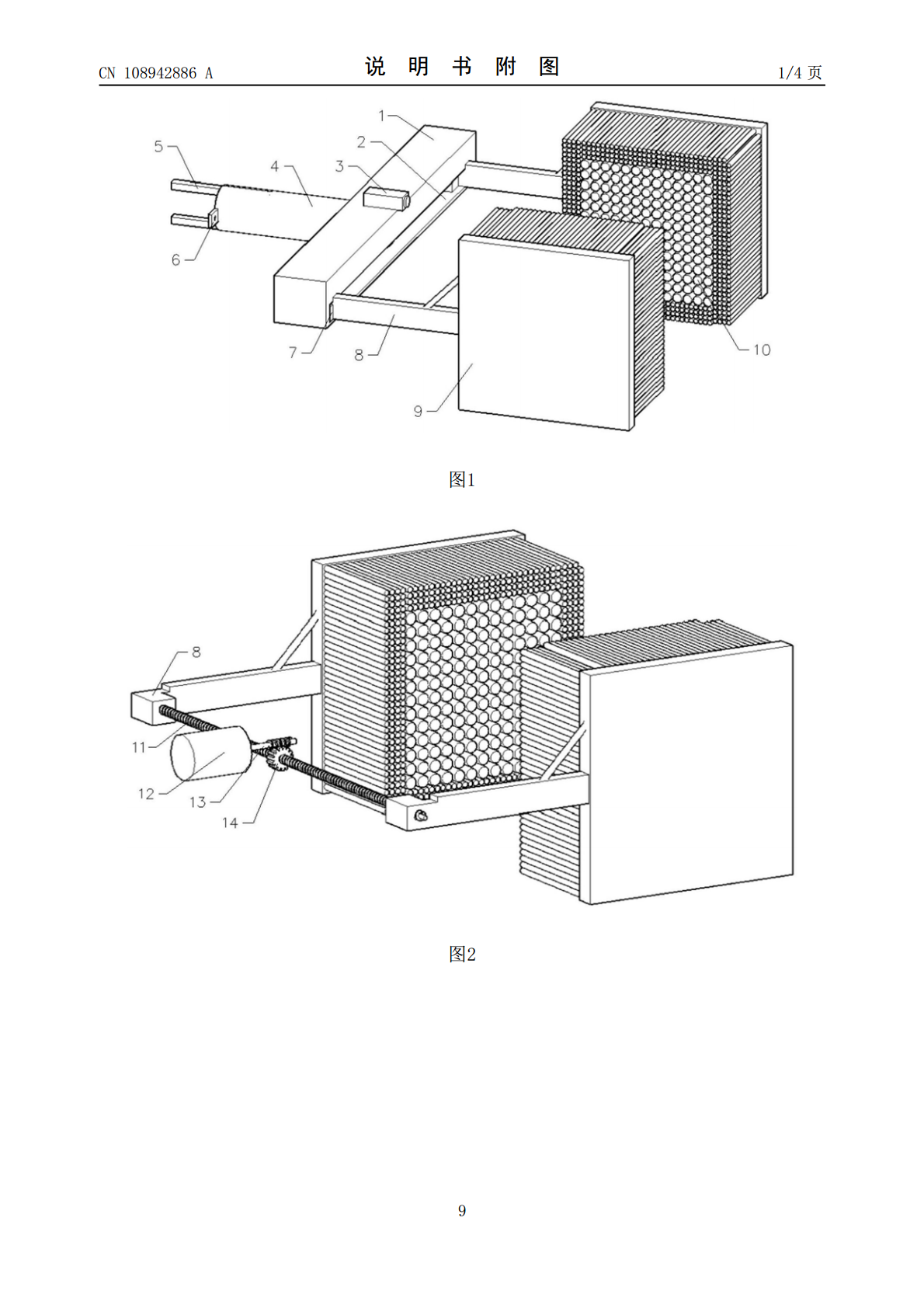
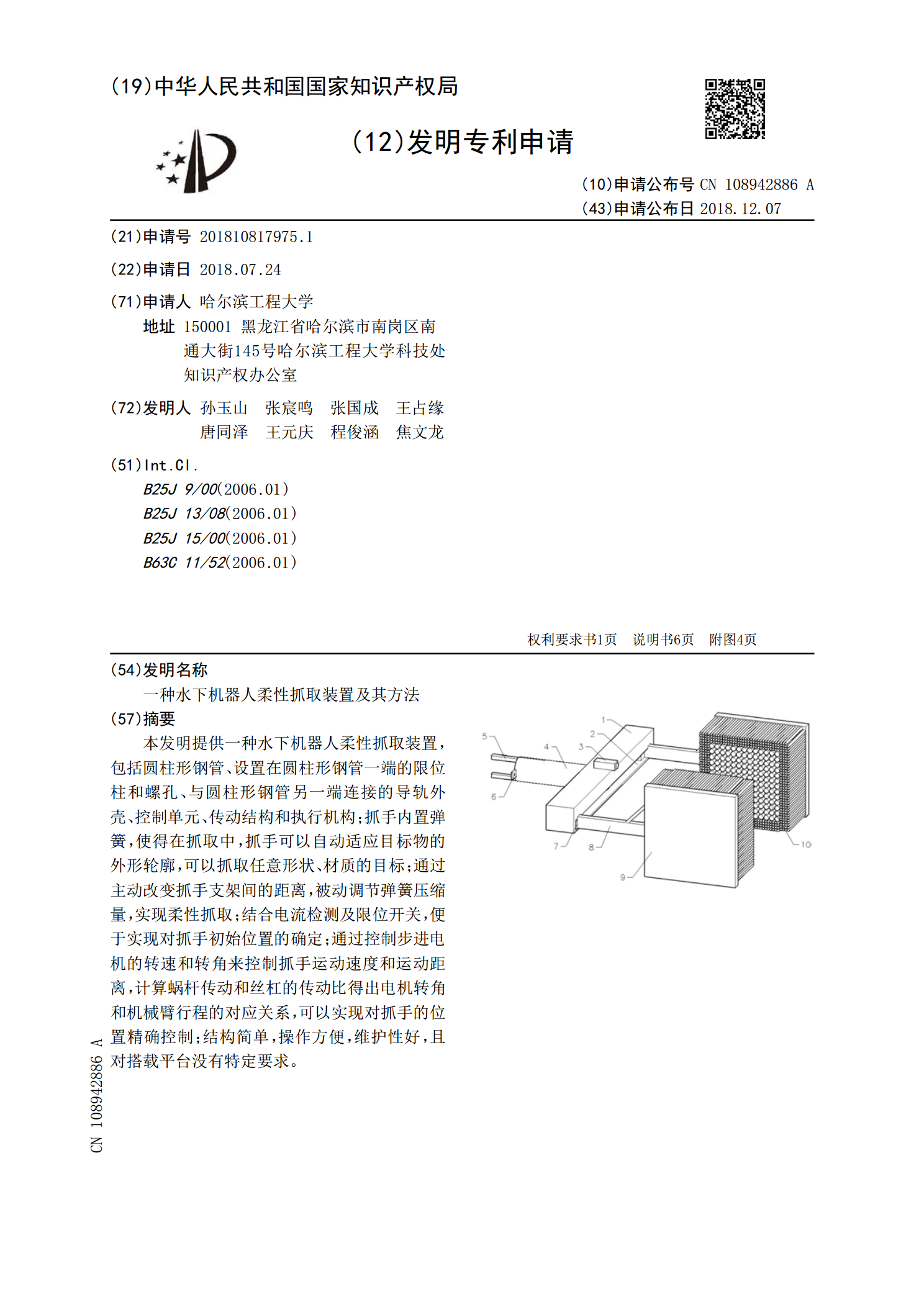
本发明提供一种水下机器人柔性抓取装置,包括圆柱形钢管、设置在圆柱形钢管一端的限位柱和螺孔、与圆柱形钢管另一端连接的导轨外壳、控制单元、传动结构和执行机构;抓手内置弹簧,使得在抓取中,抓手可以自动适应目标物的外形轮廓,可以抓取任意形状、材质的目标;通过主动改变抓手支架间的距离,被动调节弹簧压缩量,实现柔性抓取;结合电流检测及限位开关,便于实现对抓手初始位置的确定;通过控制步进电机的转速和转角来控制抓手运动速度和运动距离,计算蜗杆传动和丝杠的传动比得出电机转角和机械臂行程的对应关系,可以实现对抓手的位置精确控
一种用于水下机器人的机械抓取装置.pdf
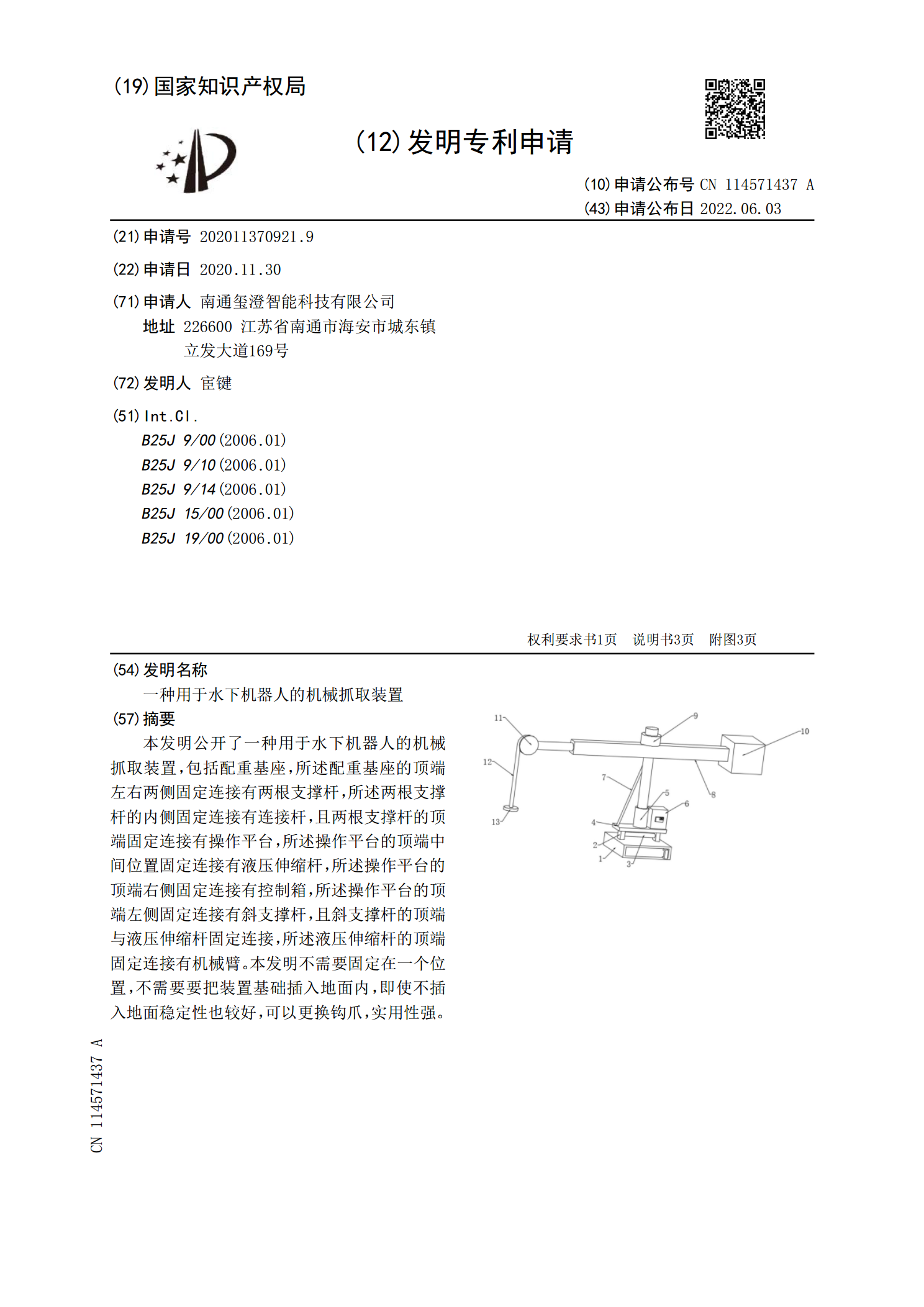
本发明公开了一种用于水下机器人的机械抓取装置,包括配重基座,所述配重基座的顶端左右两侧固定连接有两根支撑杆,所述两根支撑杆的内侧固定连接有连接杆,且两根支撑杆的顶端固定连接有操作平台,所述操作平台的顶端中间位置固定连接有液压伸缩杆,所述操作平台的顶端右侧固定连接有控制箱,所述操作平台的顶端左侧固定连接有斜支撑杆,且斜支撑杆的顶端与液压伸缩杆固定连接,所述液压伸缩杆的顶端固定连接有机械臂。本发明不需要固定在一个位置,不需要要把装置基础插入地面内,即使不插入地面稳定性也较好,可以更换钩爪,实用性强。

一种工业机器人柔性机械抓手抓取装置.pdf
本发明公开了一种工业机器人柔性机械抓手抓取装置,其结构包括底座、支撑臂、主体,底座的顶部卡合于支撑臂的底部,主体连接于支撑臂的末端,主体包括连接柱、旋转块、机械抓手,机械抓手包括框体、伸缩气缸、伸缩杆、夹紧装置、限位块,夹紧装置包括连接臂、固定卡扣、活动槽、夹紧块、复位弹簧,本发明利用六个紧贴块能够自由伸缩,使得夹取块对不同形状的产品进行夹取的时候,紧贴块能够挤压伸缩弹簧往伸缩槽的内部进行收缩,使得紧贴块的端面能够紧紧贴合于产品的端面进行夹取,防止产品所收到的夹紧力过大表面出现划痕的情况。
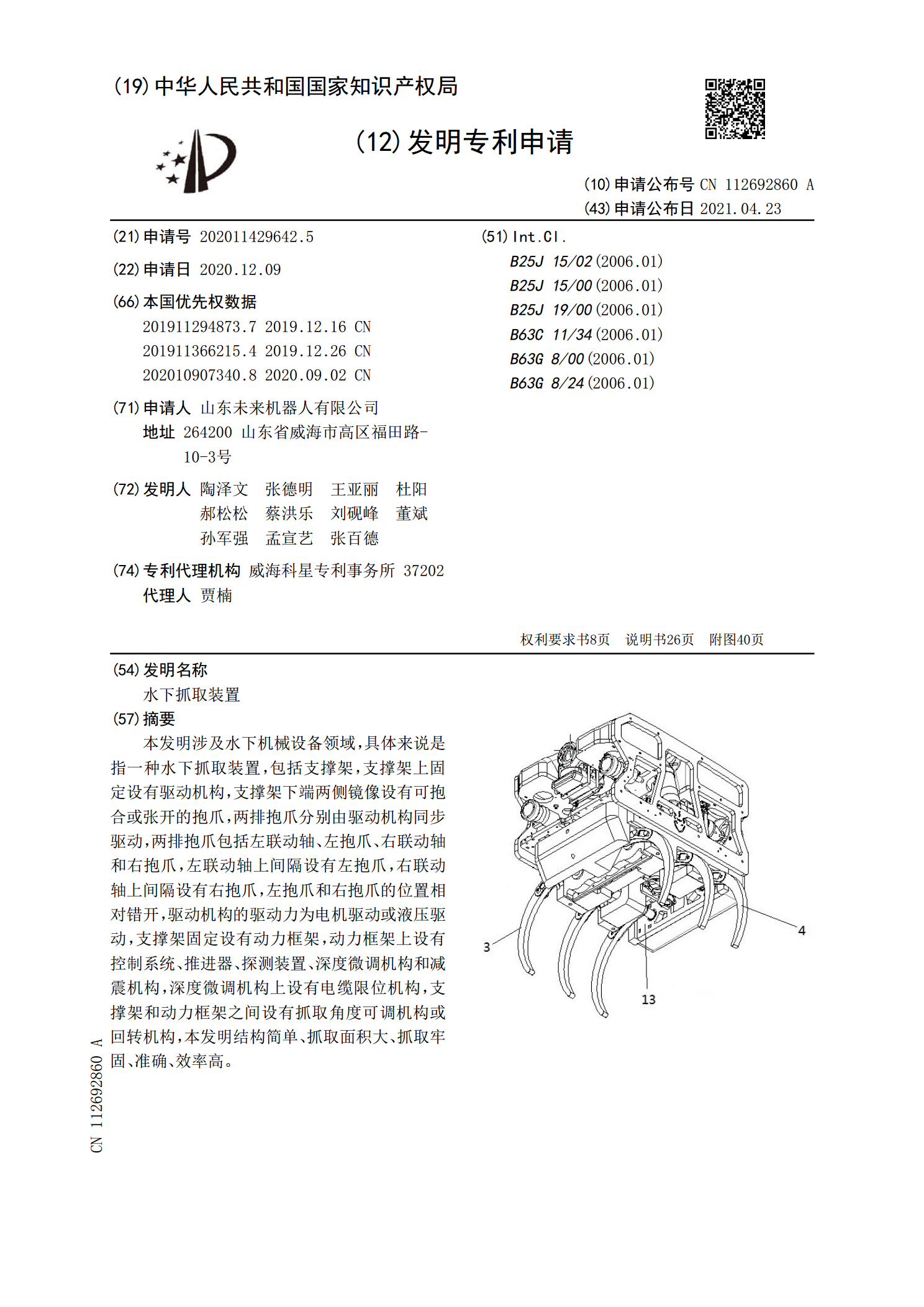
水下抓取装置.pdf
本发明涉及水下机械设备领域,具体来说是指一种水下抓取装置,包括支撑架,支撑架上固定设有驱动机构,支撑架下端两侧镜像设有可抱合或张开的抱爪,两排抱爪分别由驱动机构同步驱动,两排抱爪包括左联动轴、左抱爪、右联动轴和右抱爪,左联动轴上间隔设有左抱爪,右联动轴上间隔设有右抱爪,左抱爪和右抱爪的位置相对错开,驱动机构的驱动力为电机驱动或液压驱动,支撑架固定设有动力框架,动力框架上设有控制系统、推进器、探测装置、深度微调机构和减震机构,深度微调机构上设有电缆限位机构,支撑架和动力框架之间设有抓取角度可调机构或回转机构
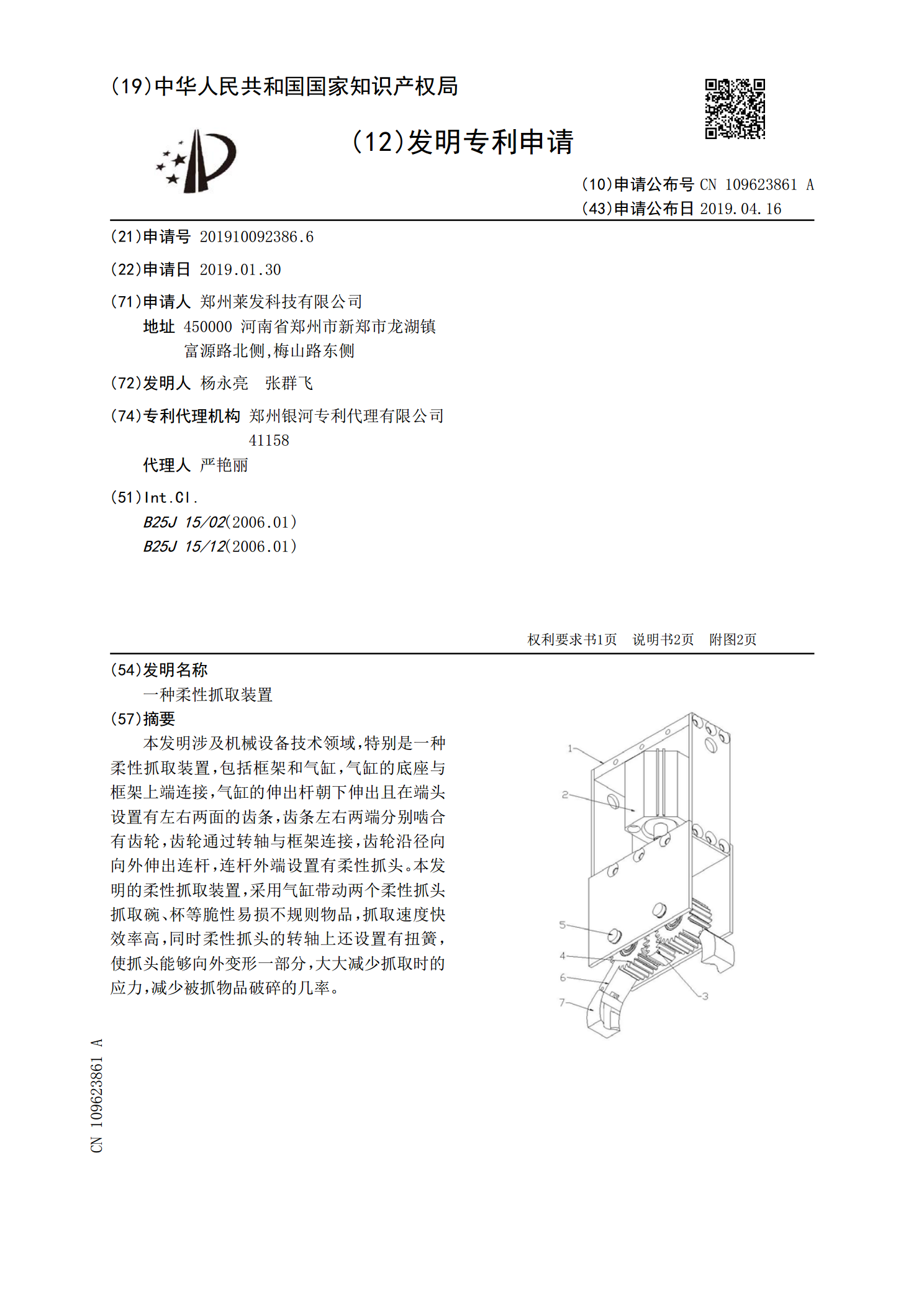
一种柔性抓取装置.pdf
本发明涉及机械设备技术领域,特别是一种柔性抓取装置,包括框架和气缸,气缸的底座与框架上端连接,气缸的伸出杆朝下伸出且在端头设置有左右两面的齿条,齿条左右两端分别啮合有齿轮,齿轮通过转轴与框架连接,齿轮沿径向向外伸出连杆,连杆外端设置有柔性抓头。本发明的柔性抓取装置,采用气缸带动两个柔性抓头抓取碗、杯等脆性易损不规则物品,抓取速度快效率高,同时柔性抓头的转轴上还设置有扭簧,使抓头能够向外变形一部分,大大减少抓取时的应力,减少被抓物品破碎的几率。