
一种用于水下机器人的机械抓取装置.pdf

莉娜****ua

1/8

2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种用于水下机器人的机械抓取装置.pdf
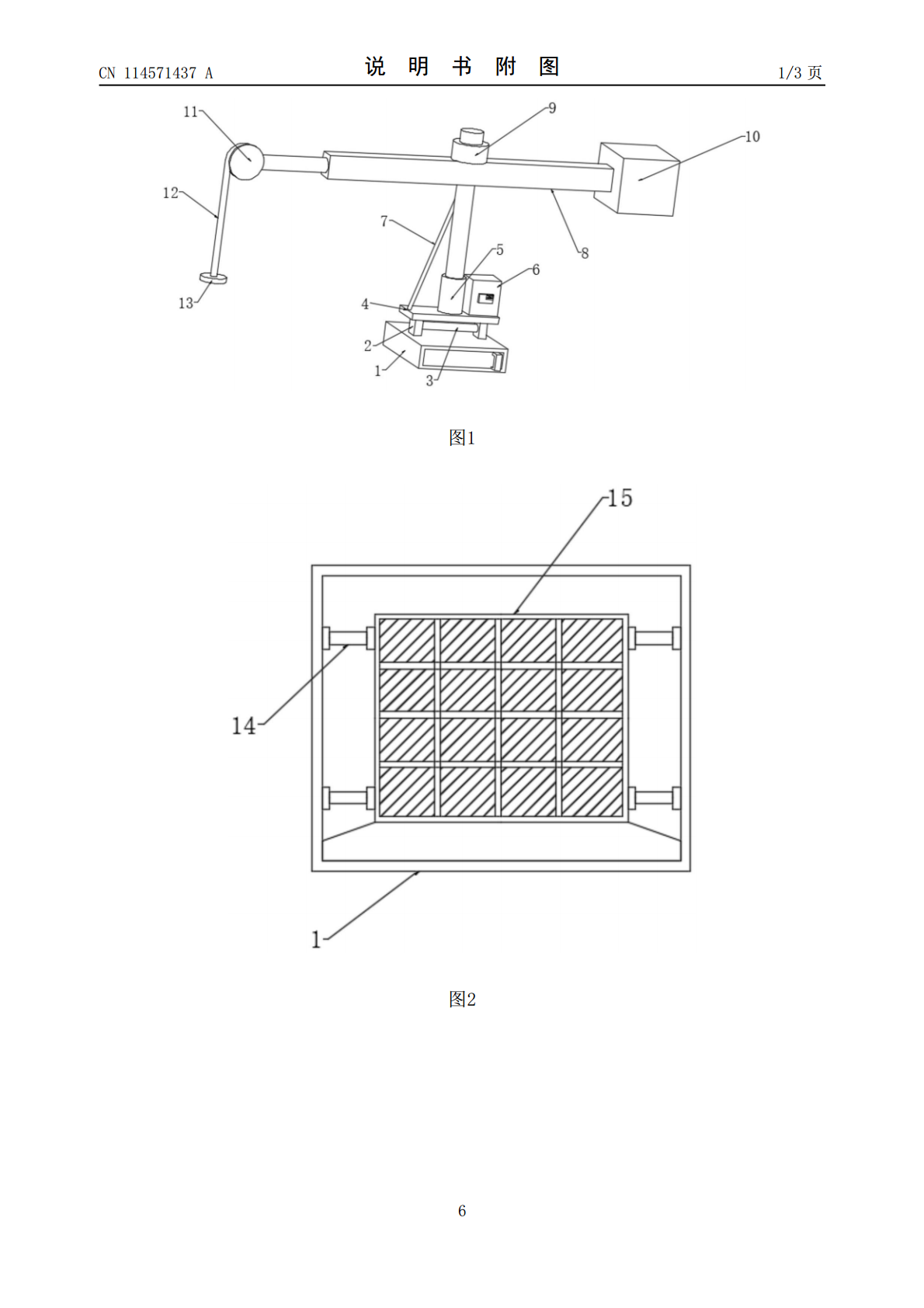
本发明公开了一种用于水下机器人的机械抓取装置,包括配重基座,所述配重基座的顶端左右两侧固定连接有两根支撑杆,所述两根支撑杆的内侧固定连接有连接杆,且两根支撑杆的顶端固定连接有操作平台,所述操作平台的顶端中间位置固定连接有液压伸缩杆,所述操作平台的顶端右侧固定连接有控制箱,所述操作平台的顶端左侧固定连接有斜支撑杆,且斜支撑杆的顶端与液压伸缩杆固定连接,所述液压伸缩杆的顶端固定连接有机械臂。本发明不需要固定在一个位置,不需要要把装置基础插入地面内,即使不插入地面稳定性也较好,可以更换钩爪,实用性强。
一种用于水下抓取棒料的机械手爪.pdf
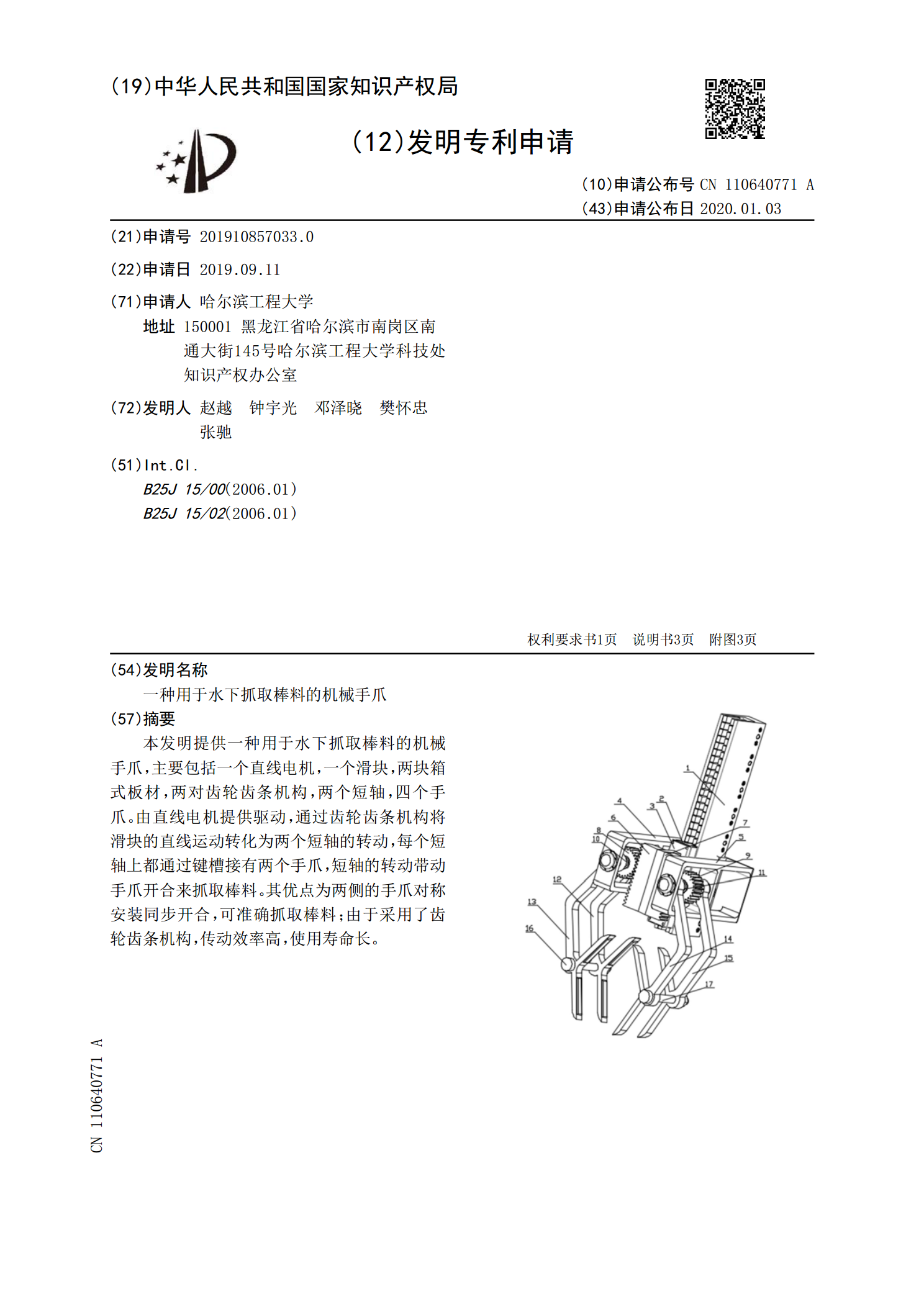
本发明提供一种用于水下抓取棒料的机械手爪,主要包括一个直线电机,一个滑块,两块箱式板材,两对齿轮齿条机构,两个短轴,四个手爪。由直线电机提供驱动,通过齿轮齿条机构将滑块的直线运动转化为两个短轴的转动,每个短轴上都通过键槽接有两个手爪,短轴的转动带动手爪开合来抓取棒料。其优点为两侧的手爪对称安装同步开合,可准确抓取棒料;由于采用了齿轮齿条机构,传动效率高,使用寿命长。
水下抓取装置.pdf
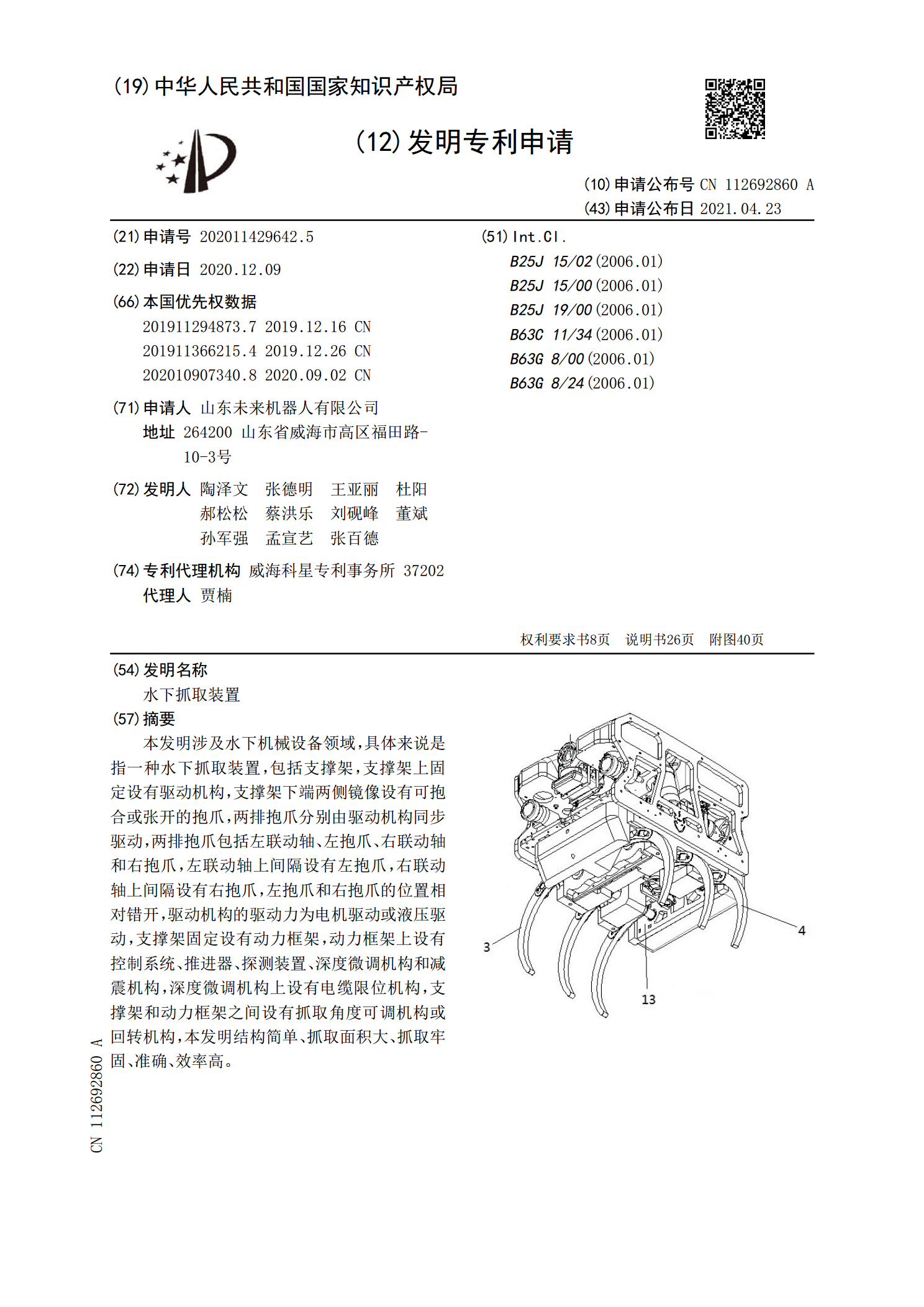
本发明涉及水下机械设备领域,具体来说是指一种水下抓取装置,包括支撑架,支撑架上固定设有驱动机构,支撑架下端两侧镜像设有可抱合或张开的抱爪,两排抱爪分别由驱动机构同步驱动,两排抱爪包括左联动轴、左抱爪、右联动轴和右抱爪,左联动轴上间隔设有左抱爪,右联动轴上间隔设有右抱爪,左抱爪和右抱爪的位置相对错开,驱动机构的驱动力为电机驱动或液压驱动,支撑架固定设有动力框架,动力框架上设有控制系统、推进器、探测装置、深度微调机构和减震机构,深度微调机构上设有电缆限位机构,支撑架和动力框架之间设有抓取角度可调机构或回转机构
一种水下机器人柔性抓取装置及其方法.pdf
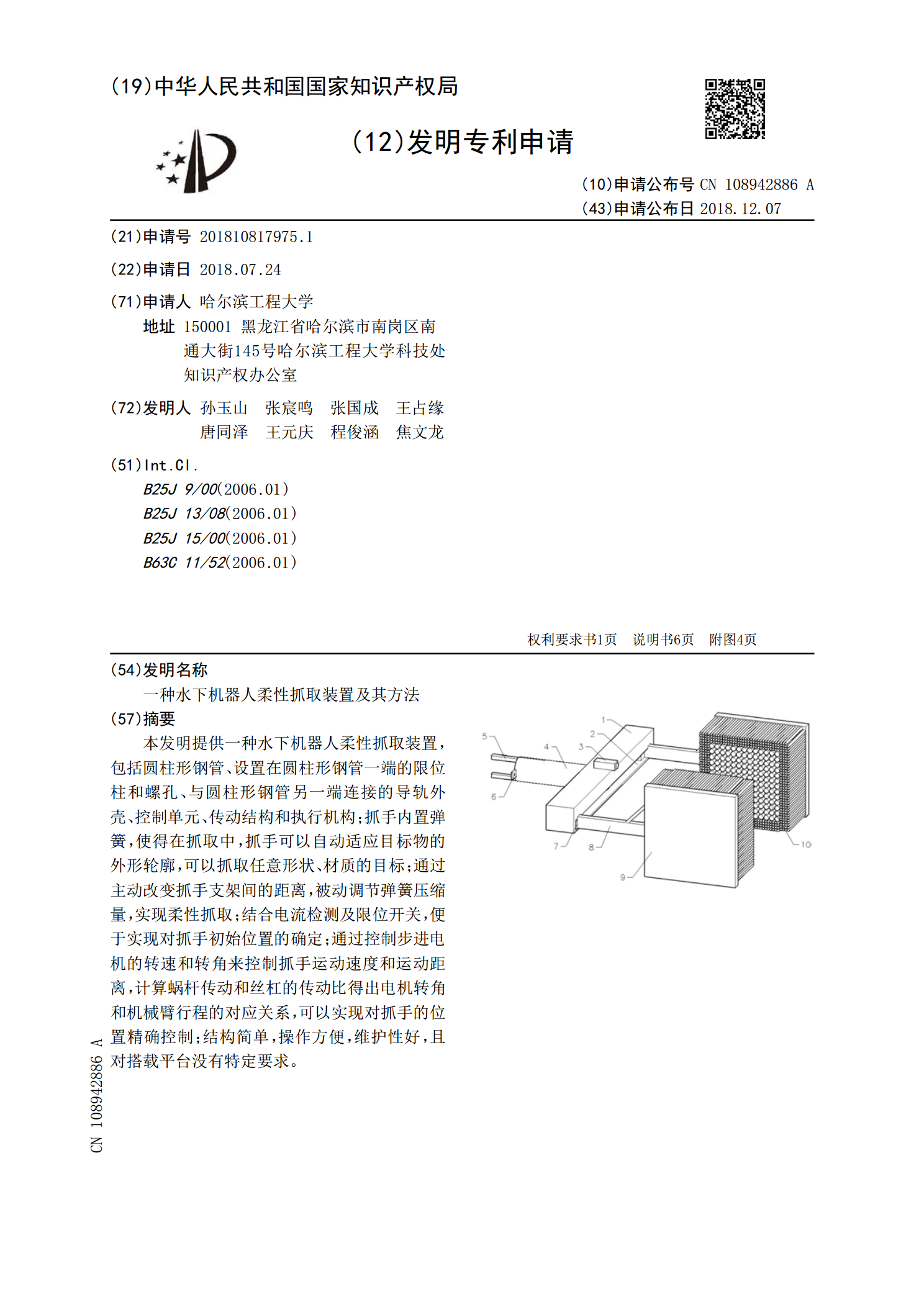
本发明提供一种水下机器人柔性抓取装置,包括圆柱形钢管、设置在圆柱形钢管一端的限位柱和螺孔、与圆柱形钢管另一端连接的导轨外壳、控制单元、传动结构和执行机构;抓手内置弹簧,使得在抓取中,抓手可以自动适应目标物的外形轮廓,可以抓取任意形状、材质的目标;通过主动改变抓手支架间的距离,被动调节弹簧压缩量,实现柔性抓取;结合电流检测及限位开关,便于实现对抓手初始位置的确定;通过控制步进电机的转速和转角来控制抓手运动速度和运动距离,计算蜗杆传动和丝杠的传动比得出电机转角和机械臂行程的对应关系,可以实现对抓手的位置精确控
一种用于工业机器人的货物抓取装置及抓取系统.pdf
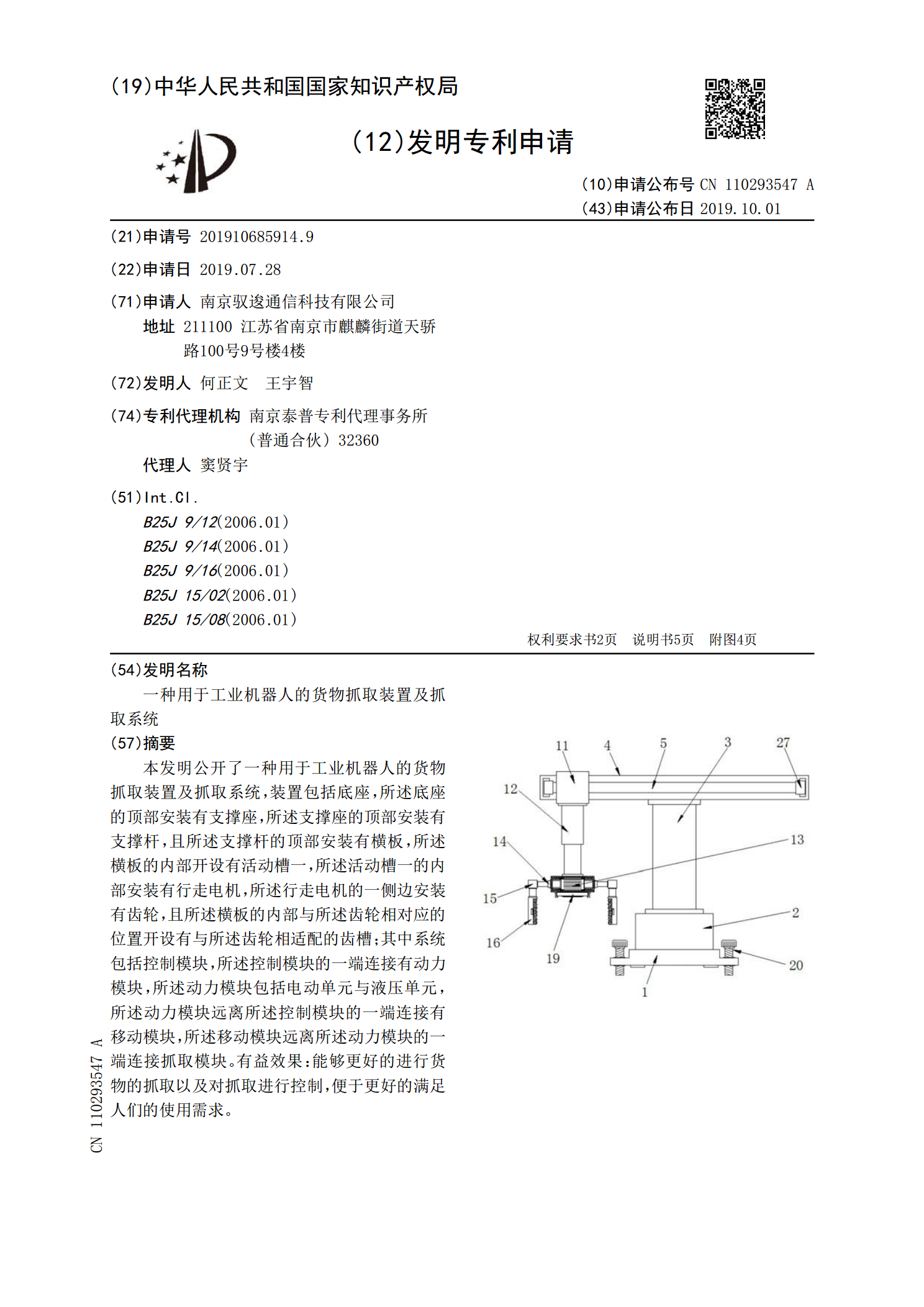
本发明公开了一种用于工业机器人的货物抓取装置及抓取系统,装置包括底座,所述底座的顶部安装有支撑座,所述支撑座的顶部安装有支撑杆,且所述支撑杆的顶部安装有横板,所述横板的内部开设有活动槽一,所述活动槽一的内部安装有行走电机,所述行走电机的一侧边安装有齿轮,且所述横板的内部与所述齿轮相对应的位置开设有与所述齿轮相适配的齿槽;其中系统包括控制模块,所述控制模块的一端连接有动力模块,所述动力模块包括电动单元与液压单元,所述动力模块远离所述控制模块的一端连接有移动模块,所述移动模块远离所述动力模块的一端连接抓取模块