
一种工业机器人柔性机械抓手抓取装置.pdf

戊午****jj

1/10

2/10

3/10

4/10
5/10

6/10

7/10

8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种工业机器人柔性机械抓手抓取装置.pdf
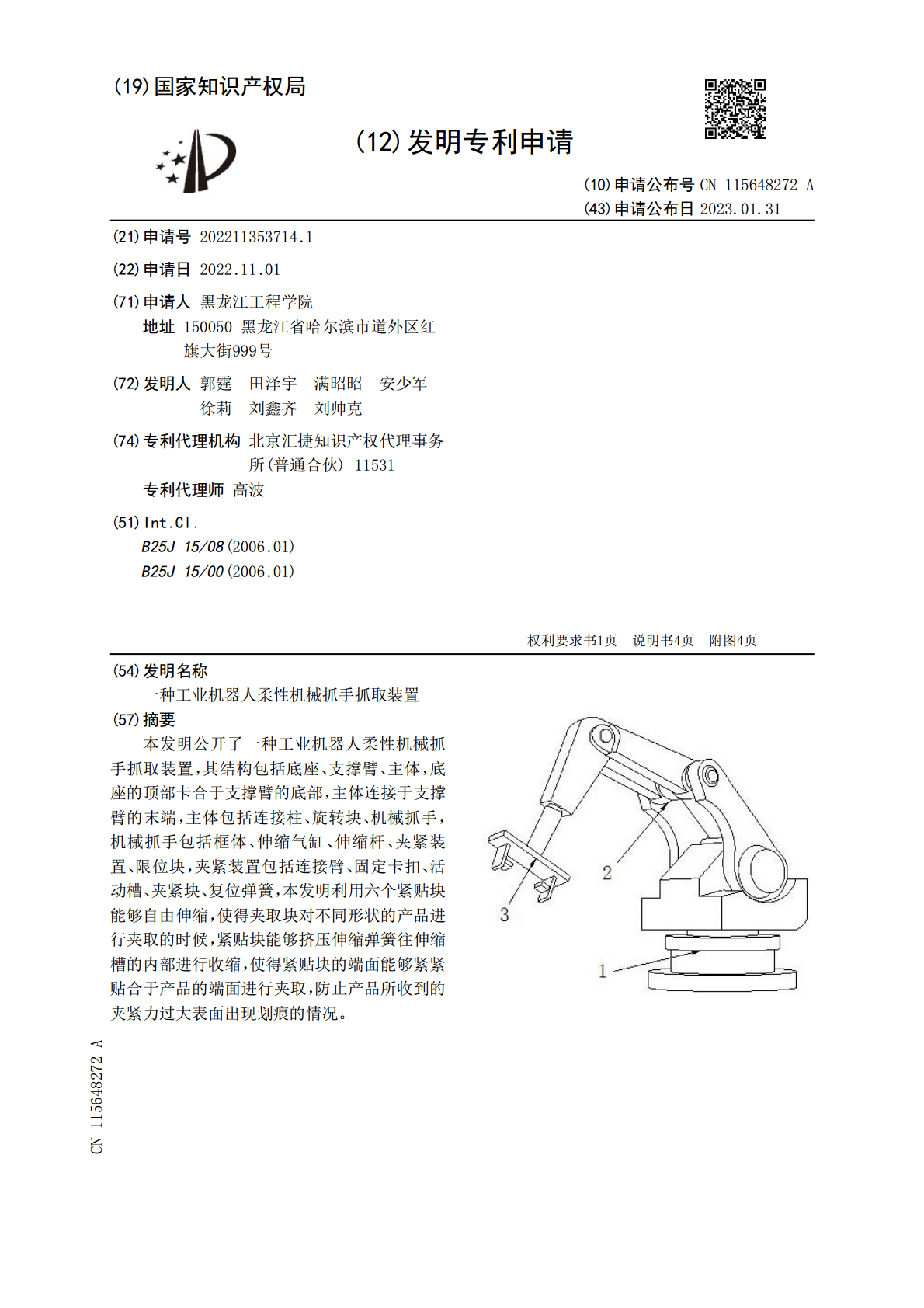
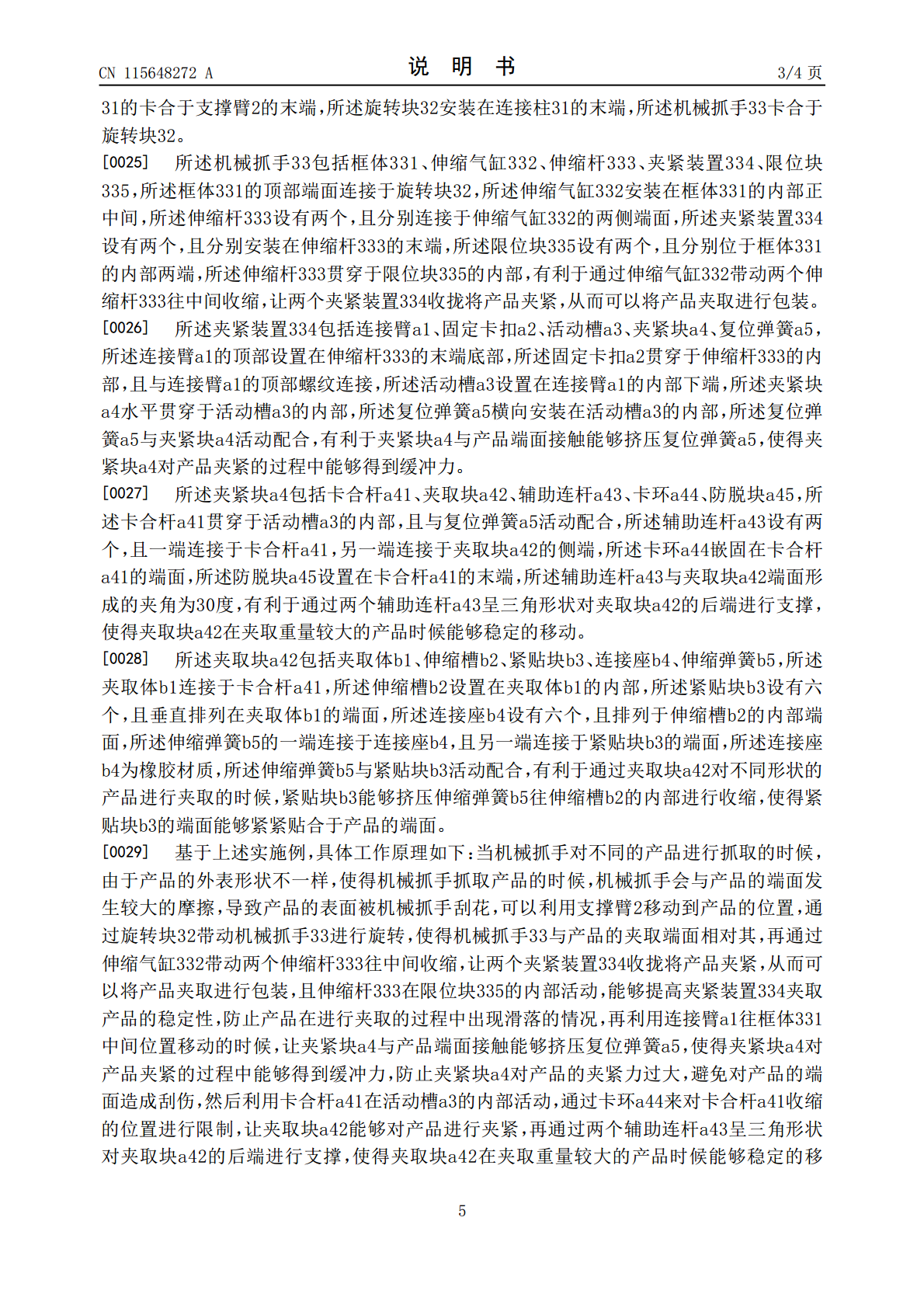
本发明公开了一种工业机器人柔性机械抓手抓取装置,其结构包括底座、支撑臂、主体,底座的顶部卡合于支撑臂的底部,主体连接于支撑臂的末端,主体包括连接柱、旋转块、机械抓手,机械抓手包括框体、伸缩气缸、伸缩杆、夹紧装置、限位块,夹紧装置包括连接臂、固定卡扣、活动槽、夹紧块、复位弹簧,本发明利用六个紧贴块能够自由伸缩,使得夹取块对不同形状的产品进行夹取的时候,紧贴块能够挤压伸缩弹簧往伸缩槽的内部进行收缩,使得紧贴块的端面能够紧紧贴合于产品的端面进行夹取,防止产品所收到的夹紧力过大表面出现划痕的情况。
一种工业机器人用机械抓取装置.pdf
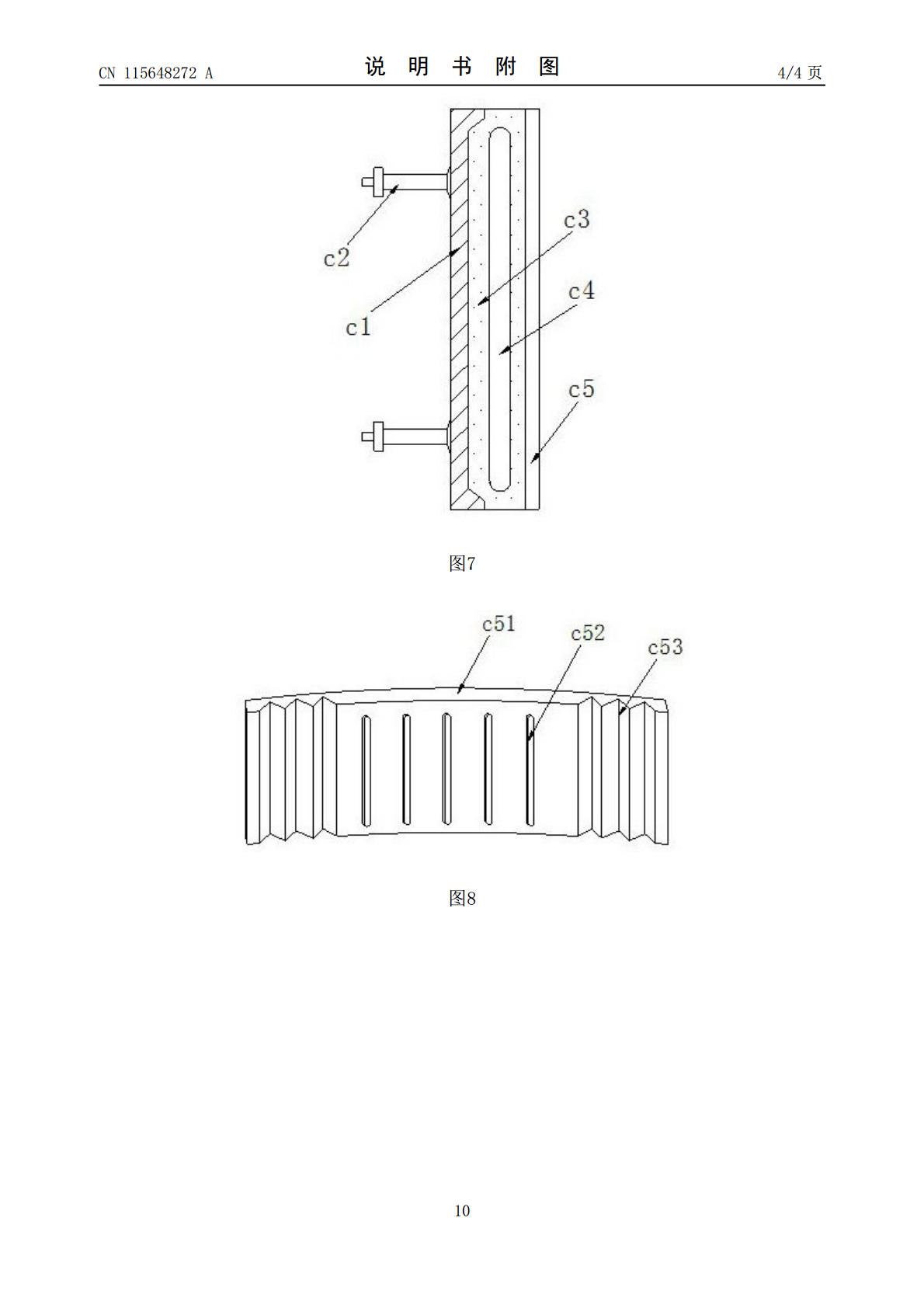
本发明公开了一种工业机器人用机械抓取装置,包括支撑底座、支撑架、旋转电机和操作箱,所述支撑底座上设置有所述支撑架和所述操作箱,所述支撑架的下方设置有旋转电机,所述支撑架的上方设置有旋转座,所述旋转座上设置有第一机械臂,所述旋转座与所述第一机械臂的连接位置设置有第一电动机,所述第一机械臂的一端设置有第二电动机和第二机械臂,所述第二机械臂的一端设置有夹紧卡爪一和夹紧卡爪二。有益效果在于:本发明在夹紧卡爪内设置有压力传感器,用于检测夹紧力,避免控制物品抓取过程中受力过大或过小,对物品造成损伤,该抓取装置设置有两
一种工业机器人用机械抓取装置.pdf
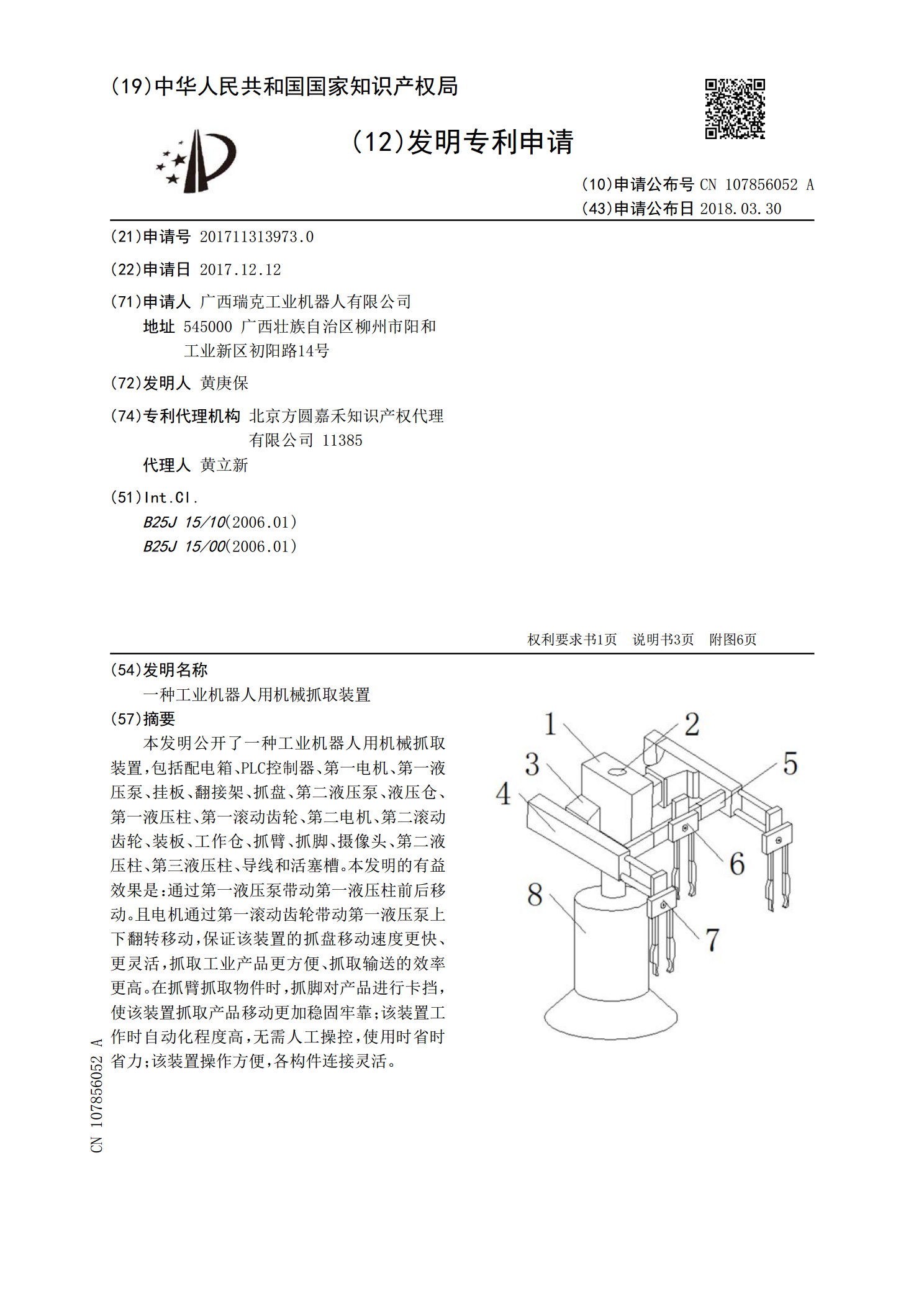
本发明公开了一种工业机器人用机械抓取装置,包括配电箱、PLC控制器、第一电机、第一液压泵、挂板、翻接架、抓盘、第二液压泵、液压仓、第一液压柱、第一滚动齿轮、第二电机、第二滚动齿轮、装板、工作仓、抓臂、抓脚、摄像头、第二液压柱、第三液压柱、导线和活塞槽。本发明的有益效果是:通过第一液压泵带动第一液压柱前后移动。且电机通过第一滚动齿轮带动第一液压泵上下翻转移动,保证该装置的抓盘移动速度更快、更灵活,抓取工业产品更方便、抓取输送的效率更高。在抓臂抓取物件时,抓脚对产品进行卡挡,使该装置抓取产品移动更加稳固牢靠;
一种工业机器人用机械抓取装置.pdf
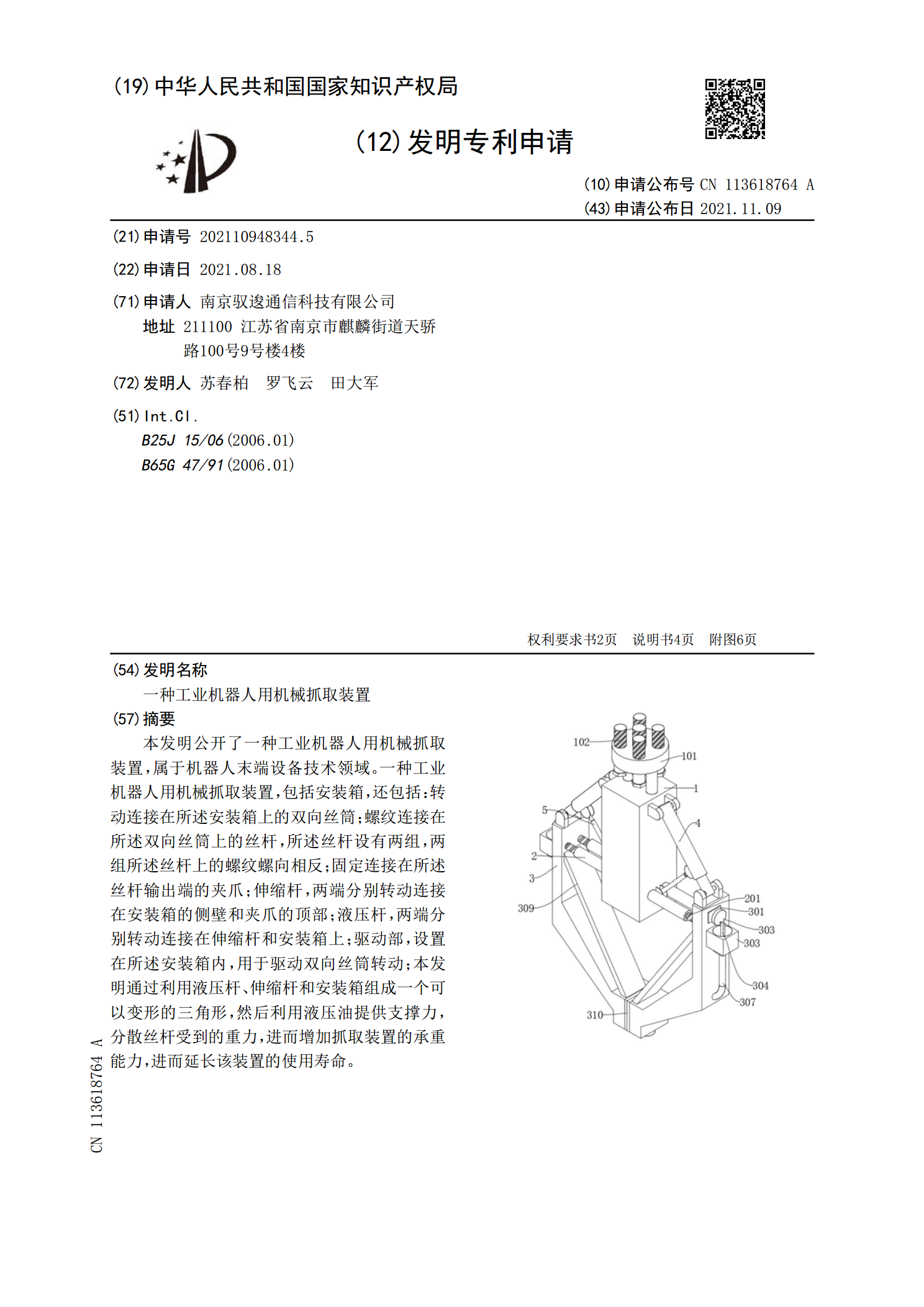
本发明公开了一种工业机器人用机械抓取装置,属于机器人末端设备技术领域。一种工业机器人用机械抓取装置,包括安装箱,还包括:转动连接在所述安装箱上的双向丝筒;螺纹连接在所述双向丝筒上的丝杆,所述丝杆设有两组,两组所述丝杆上的螺纹螺向相反;固定连接在所述丝杆输出端的夹爪;伸缩杆,两端分别转动连接在安装箱的侧壁和夹爪的顶部;液压杆,两端分别转动连接在伸缩杆和安装箱上;驱动部,设置在所述安装箱内,用于驱动双向丝筒转动;本发明通过利用液压杆、伸缩杆和安装箱组成一个可以变形的三角形,然后利用液压油提供支撑力,分散丝杆受
一种用于工业机器人的货物抓取装置及抓取系统.pdf
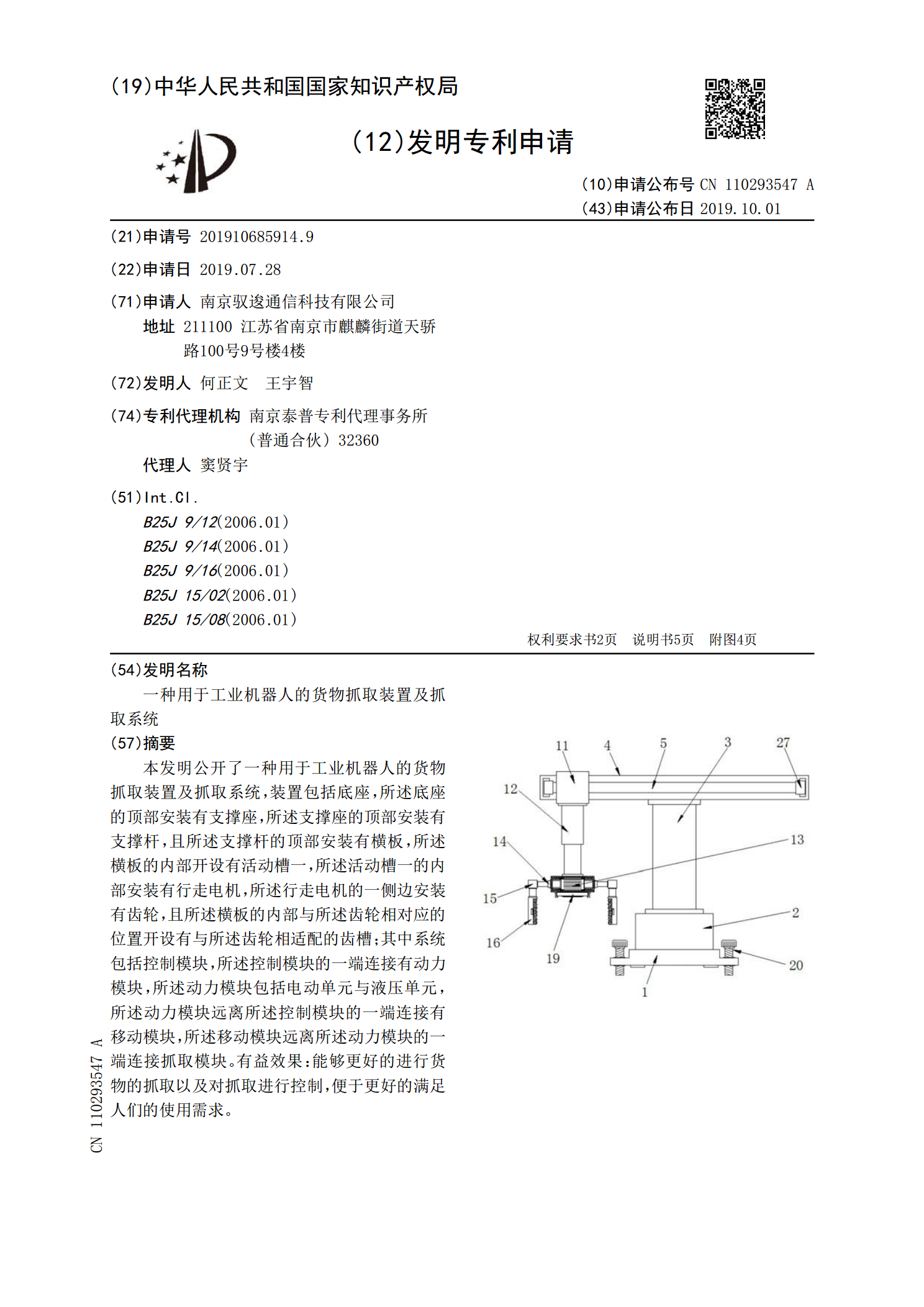
本发明公开了一种用于工业机器人的货物抓取装置及抓取系统,装置包括底座,所述底座的顶部安装有支撑座,所述支撑座的顶部安装有支撑杆,且所述支撑杆的顶部安装有横板,所述横板的内部开设有活动槽一,所述活动槽一的内部安装有行走电机,所述行走电机的一侧边安装有齿轮,且所述横板的内部与所述齿轮相对应的位置开设有与所述齿轮相适配的齿槽;其中系统包括控制模块,所述控制模块的一端连接有动力模块,所述动力模块包括电动单元与液压单元,所述动力模块远离所述控制模块的一端连接有移动模块,所述移动模块远离所述动力模块的一端连接抓取模块