
水下抓取装置.pdf

一条****彩妍

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共75页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
水下抓取装置.pdf
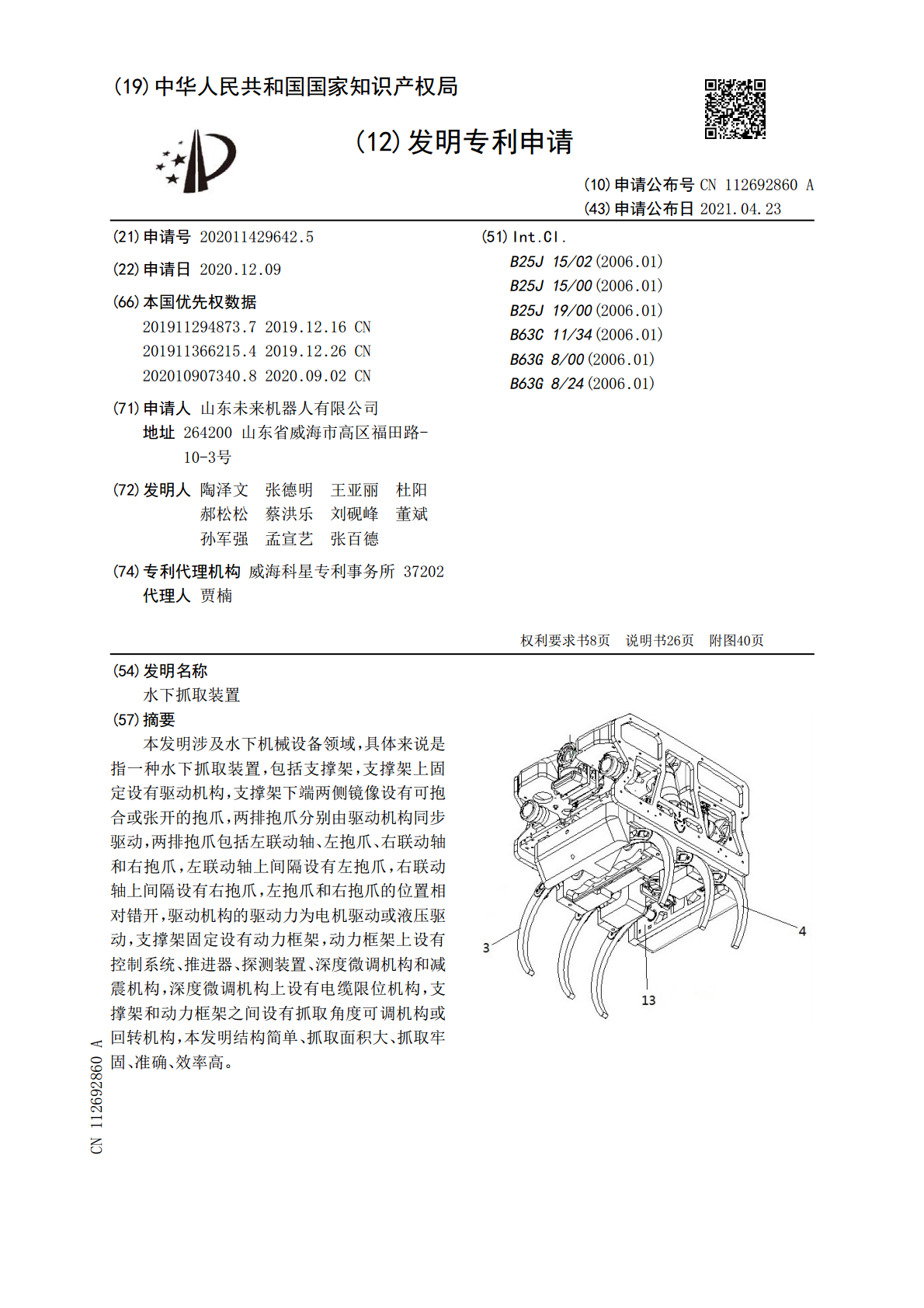
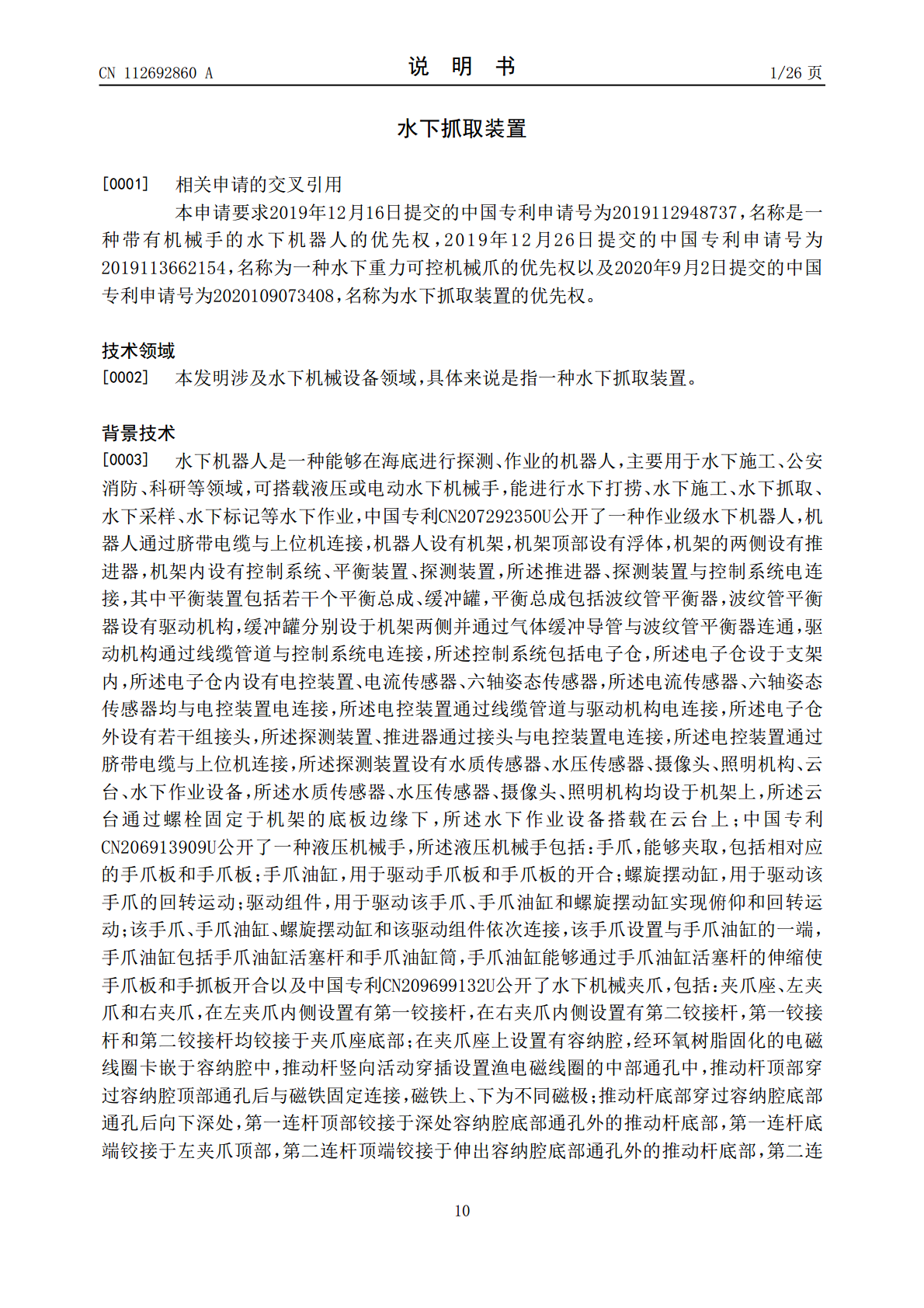
本发明涉及水下机械设备领域,具体来说是指一种水下抓取装置,包括支撑架,支撑架上固定设有驱动机构,支撑架下端两侧镜像设有可抱合或张开的抱爪,两排抱爪分别由驱动机构同步驱动,两排抱爪包括左联动轴、左抱爪、右联动轴和右抱爪,左联动轴上间隔设有左抱爪,右联动轴上间隔设有右抱爪,左抱爪和右抱爪的位置相对错开,驱动机构的驱动力为电机驱动或液压驱动,支撑架固定设有动力框架,动力框架上设有控制系统、推进器、探测装置、深度微调机构和减震机构,深度微调机构上设有电缆限位机构,支撑架和动力框架之间设有抓取角度可调机构或回转机构
一种水下小目标定位抓取装置及方法.pdf
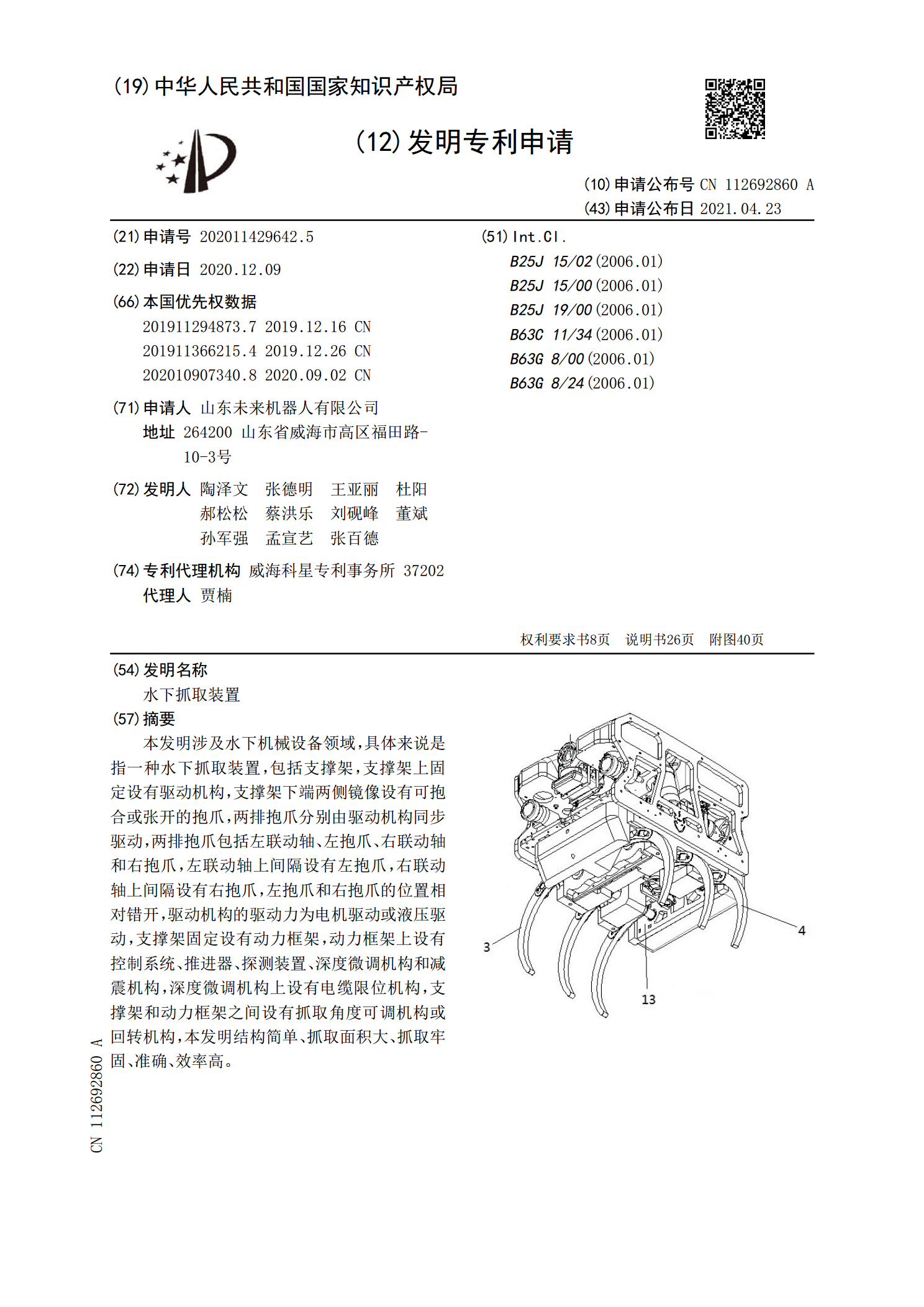
本发明提供一种水下小目标定位抓取装置,承载体、设置于承载体两侧的多个所述推进器和用于装载目标物的网袋,还包括:机械手、第一摄像头、第二摄像头、推进器、处理单元、深度传感器、声纳和驱动机构;处理单元接收第一摄像头、第二摄像头、深度传感器、声纳各自采集的数据信息并进行处理,根据处理结果控制驱动机构驱动机械手对目标物进行抓取。本发明在机器人上方的第一摄像头成功识别到目标物后,机器人根据目标物所在位置调整自身姿态,当目标物进入第一摄像头视野盲区后,可由固定于机械手上的第二摄像头继续跟踪目标物,通过第一摄像头和第二
一种用于水下机器人的机械抓取装置.pdf
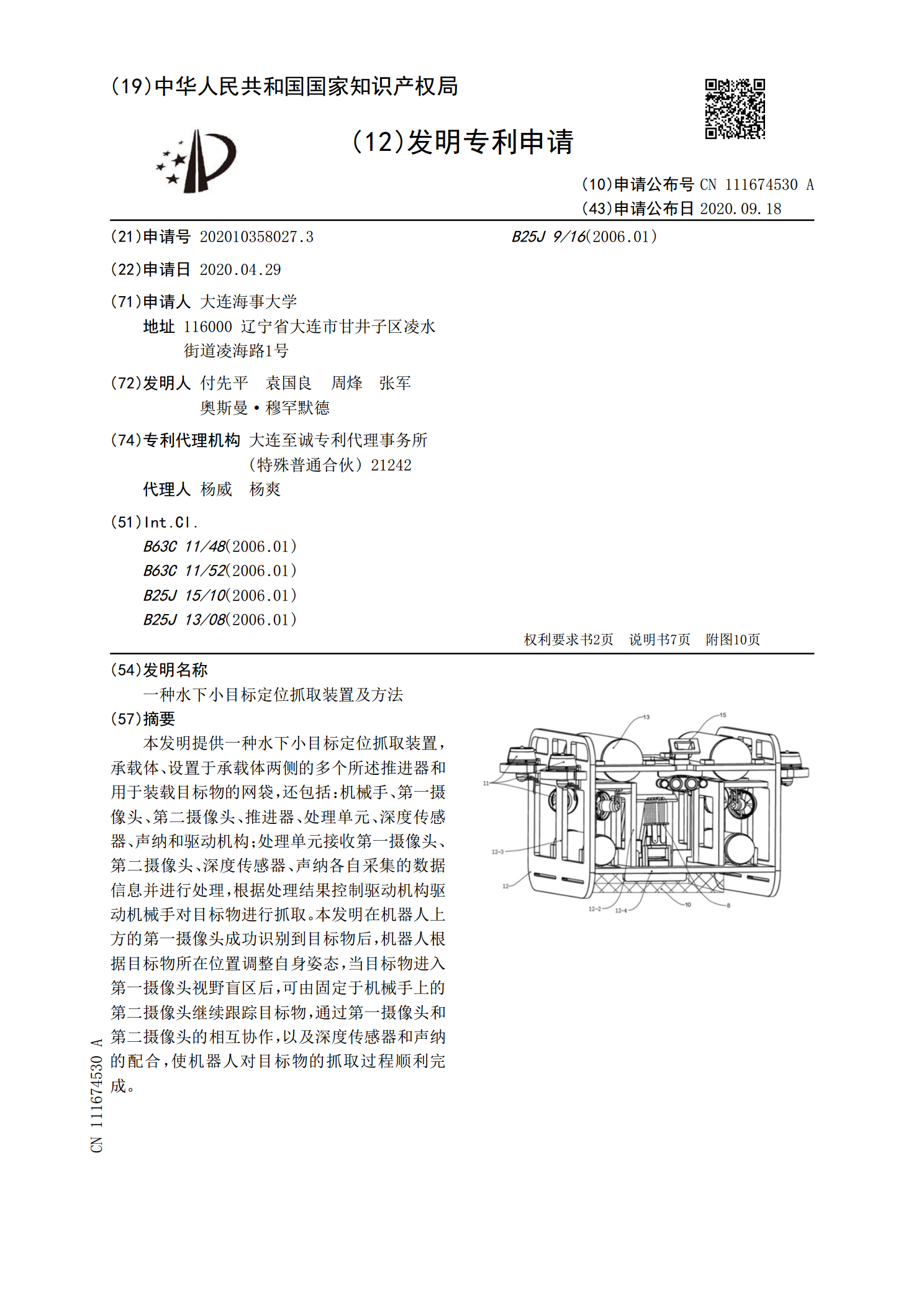
本发明公开了一种用于水下机器人的机械抓取装置,包括配重基座,所述配重基座的顶端左右两侧固定连接有两根支撑杆,所述两根支撑杆的内侧固定连接有连接杆,且两根支撑杆的顶端固定连接有操作平台,所述操作平台的顶端中间位置固定连接有液压伸缩杆,所述操作平台的顶端右侧固定连接有控制箱,所述操作平台的顶端左侧固定连接有斜支撑杆,且斜支撑杆的顶端与液压伸缩杆固定连接,所述液压伸缩杆的顶端固定连接有机械臂。本发明不需要固定在一个位置,不需要要把装置基础插入地面内,即使不插入地面稳定性也较好,可以更换钩爪,实用性强。

抓取装置及抓取方法.pdf
本申请涉及一种抓取装置及抓取方法。抓取装置包括基准夹爪、辅助夹爪和驱动机构,所述基准夹爪沿第一方向设置有第一支撑部和第二支撑部,所述第一支撑部和所述第二支撑部分别用于与产品所述第二方向一端的外壁抵接,所述第二方向与第一方向相互垂直;所述辅助夹爪靠近所述基准夹爪的一侧设置有第三支撑部,所述第三支撑部用于与所述产品所述第二方向另一端的外壁抵接,所述第三支撑部位于所述第一支撑部和所述第二支撑部连接线的中垂线上;所述驱动机构驱动所述基准夹爪和所述辅助夹爪沿第二方向相互靠近或远离。该抓取装置和抓取方法能够缓解产品夹
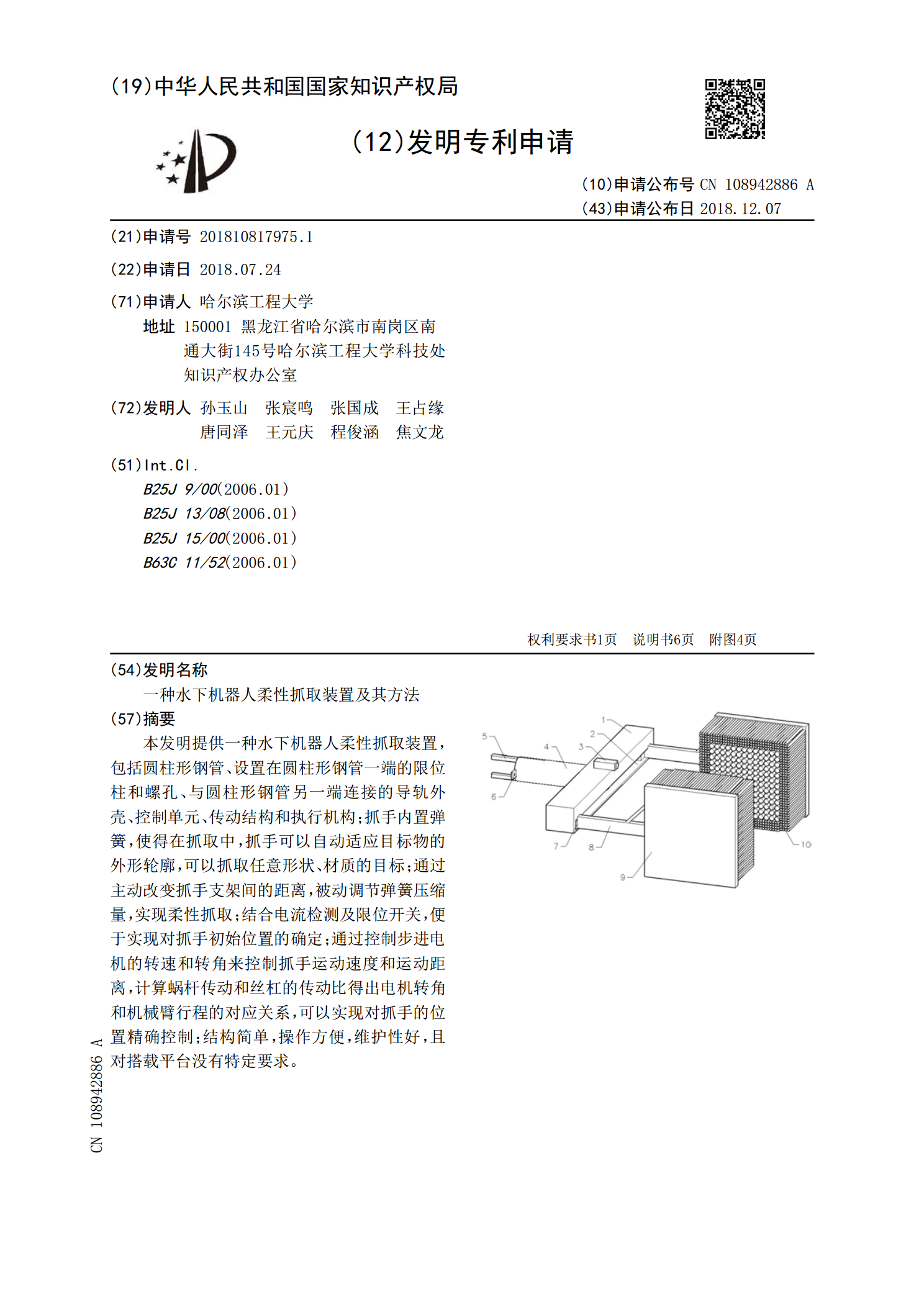
一种水下机器人柔性抓取装置及其方法.pdf
本发明提供一种水下机器人柔性抓取装置,包括圆柱形钢管、设置在圆柱形钢管一端的限位柱和螺孔、与圆柱形钢管另一端连接的导轨外壳、控制单元、传动结构和执行机构;抓手内置弹簧,使得在抓取中,抓手可以自动适应目标物的外形轮廓,可以抓取任意形状、材质的目标;通过主动改变抓手支架间的距离,被动调节弹簧压缩量,实现柔性抓取;结合电流检测及限位开关,便于实现对抓手初始位置的确定;通过控制步进电机的转速和转角来控制抓手运动速度和运动距离,计算蜗杆传动和丝杠的传动比得出电机转角和机械臂行程的对应关系,可以实现对抓手的位置精确控