
一种搬运机器人.pdf

玉怡****文档


1/8

2/8
3/8

4/8

5/8

6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种搬运机器人.pdf
本发明公开了一种搬运机器人,包括装置外框、第一支撑主杆、第二支撑主杆和横向连接杆,所述装置外框的表面安置有外框面板,且外框面板的下端连接安置有移动轮,所述外框面板上预留有滑动槽,所述装置外框的内部安置有升降机,所述升降杆上安装有载物台,所述第一支撑主杆和第二支撑主杆之间通过固定螺栓进行固定,所述横向连接杆的上方连接安置有滑轨,所述竖向连接杆的下端垂直连接有水平连接杆,且水平连接杆的上方设置有货物控制臂板。该搬运机器人,结合现有的搬运车结构进行设计,将升降装置与车体进行连接,同时在上料处安置有自动化控制臂板
一种搬运机器人.pdf
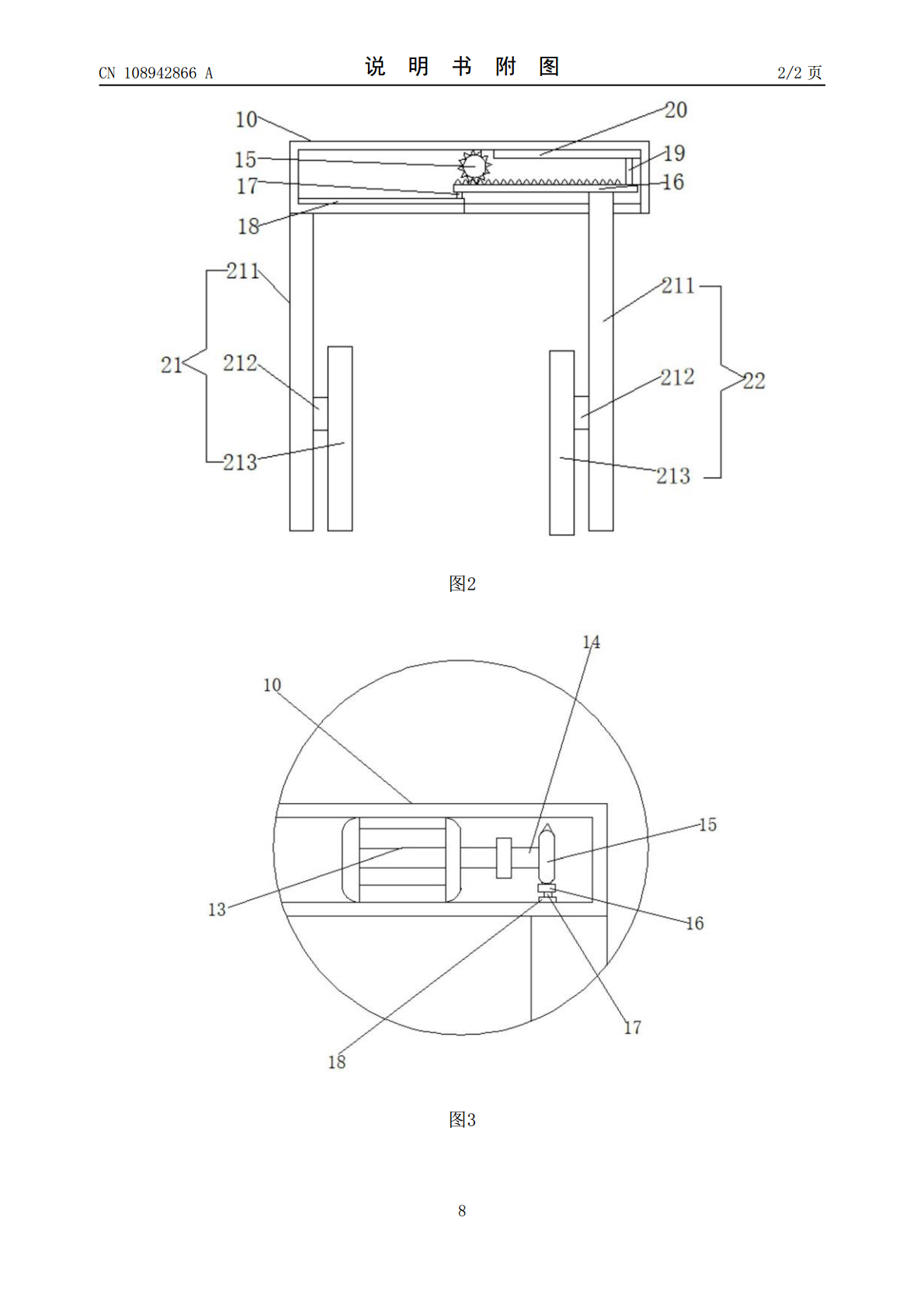
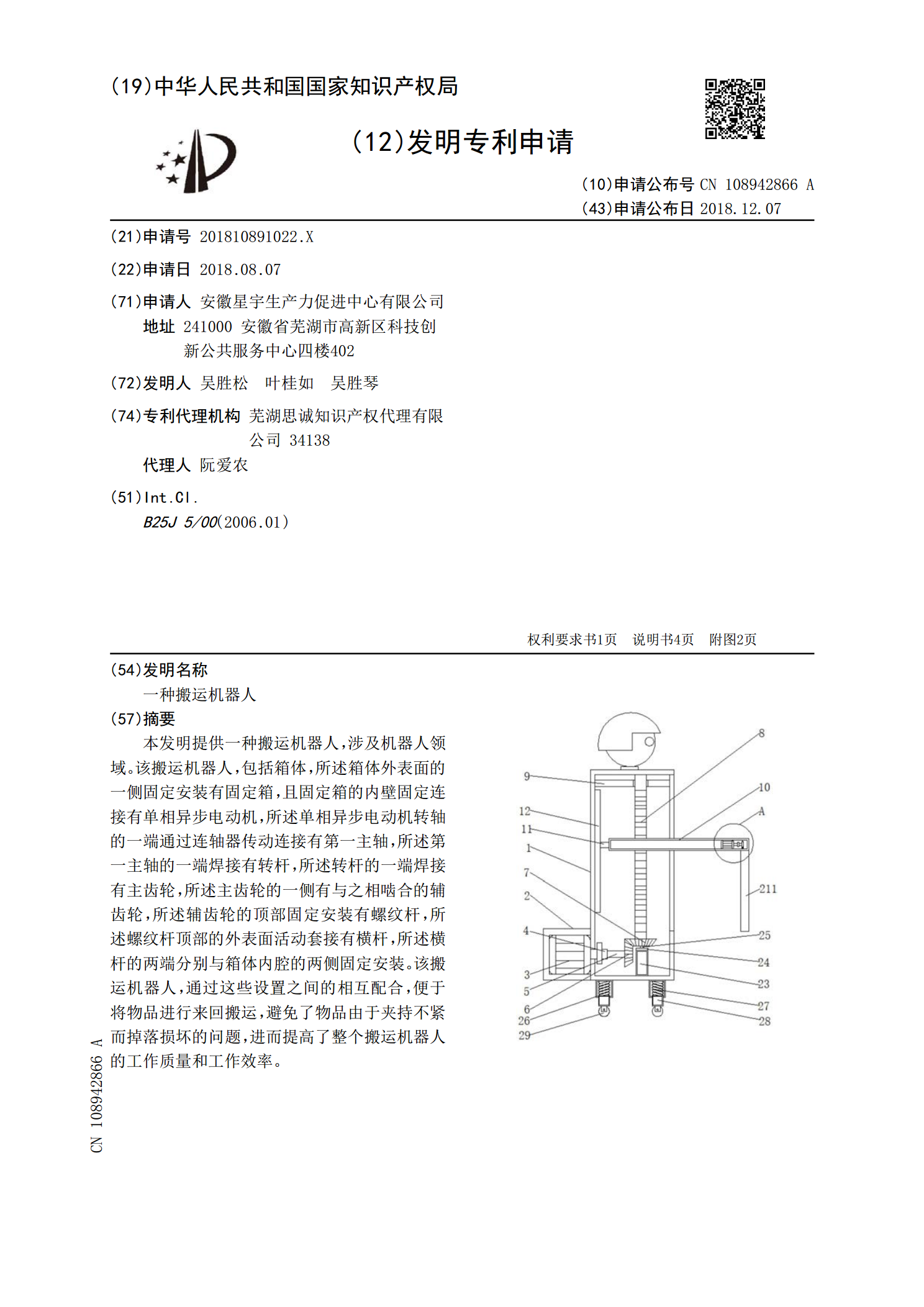
本发明提供一种搬运机器人,涉及机器人领域。该搬运机器人,包括箱体,所述箱体外表面的一侧固定安装有固定箱,且固定箱的内壁固定连接有单相异步电动机,所述单相异步电动机转轴的一端通过连轴器传动连接有第一主轴,所述第一主轴的一端焊接有转杆,所述转杆的一端焊接有主齿轮,所述主齿轮的一侧有与之相啮合的辅齿轮,所述辅齿轮的顶部固定安装有螺纹杆,所述螺纹杆顶部的外表面活动套接有横杆,所述横杆的两端分别与箱体内腔的两侧固定安装。该搬运机器人,通过这些设置之间的相互配合,便于将物品进行来回搬运,避免了物品由于夹持不紧而掉落损

一种搬运机器人.pdf
本发明公开了一种搬运机器人,包括扶手,包括扶手倾斜设置在后板的后端,后板下方设置有后轮,支撑板左端使用固定条固定座后板的下端,支撑板右端使用滑动套套在前板的下端,气缸固定在后板和前板之间,前轮设置在前板下方,前轮内侧设置有第一链轮,第一链轮通过铁链和第二链轮传动连接,第一电机与第二链轮传动连接,后板上设置有后装板,前板上设置有前装板,后装板内侧设置有滑槽,后装板右端设置有限位板,前装板外侧设置有滑块,滑块左端设置有限位块,能够对后装板与前装板前后伸缩调节,以适应不同尺寸类型物品的搬运需求,减少搬运机器人自

一种搬运机器人.pdf
本发明属于搬运技术领域,具体的说是一种搬运机器人,包括装载箱、固定板和三角行星轮,所述固定板的上表面固连有一对支架;两个所述支架之间共同转动连接同一个装载箱;所述固定板的四个角分别设有三角行星轮;本发明有效的解决了现由于技术中,搬运机器人在爬楼梯或上台阶时,因为台阶的高度落差问题导致搬运机器人倾斜,进而导致搬运机器人内装载的搬运货物的倾斜,使得搬运货物出现倾倒、挤压以及碰撞等现象,从而造成搬运货物损坏事故的发生,实现了搬运机器人在爬楼梯或上下台阶时,对搬运机器人内部装载的货物的有效保护,极大了降低了搬运货
一种搬运机器人.pdf
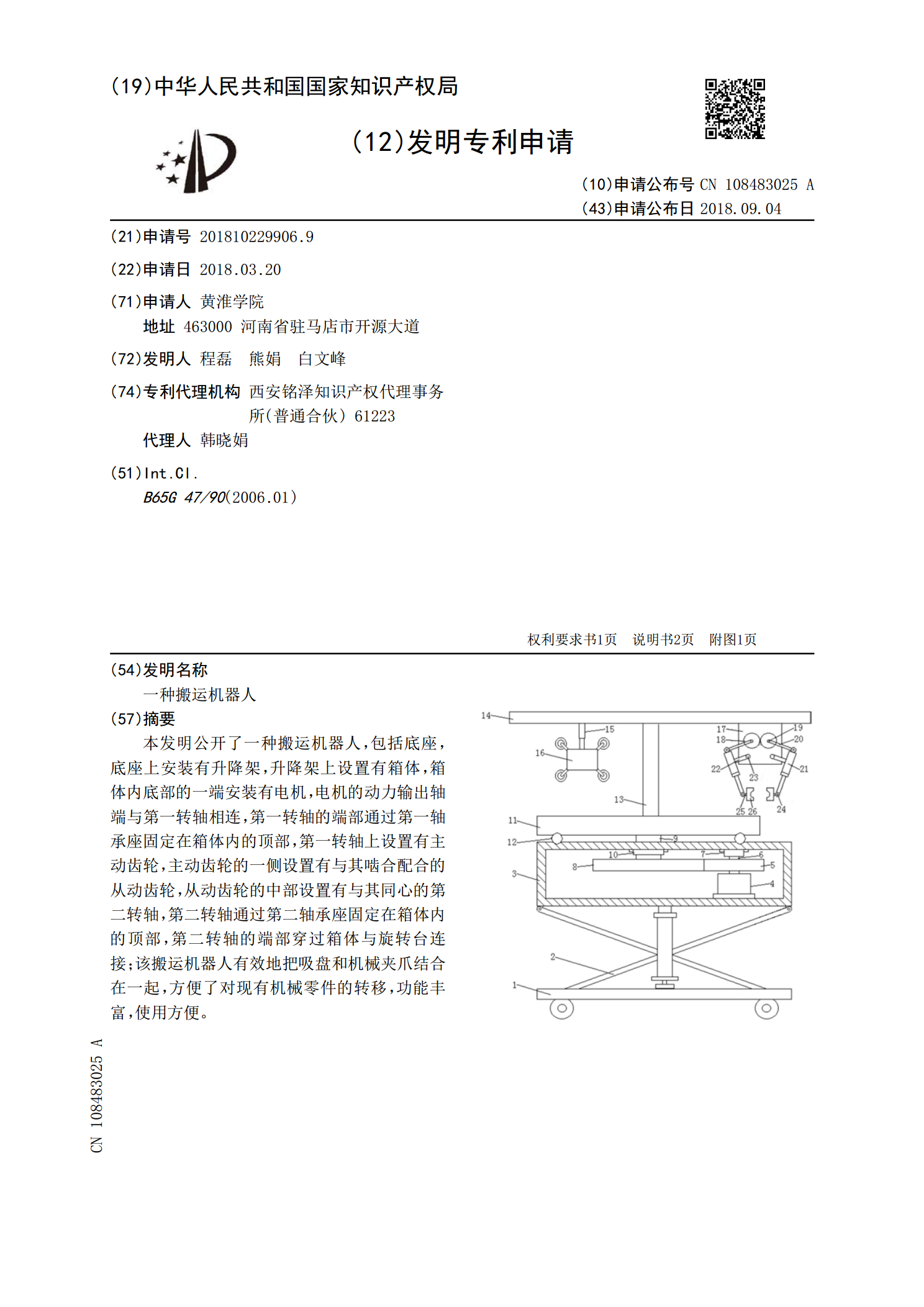
本发明公开了一种搬运机器人,包括底座,底座上安装有升降架,升降架上设置有箱体,箱体内底部的一端安装有电机,电机的动力输出轴端与第一转轴相连,第一转轴的端部通过第一轴承座固定在箱体内的顶部,第一转轴上设置有主动齿轮,主动齿轮的一侧设置有与其啮合配合的从动齿轮,从动齿轮的中部设置有与其同心的第二转轴,第二转轴通过第二轴承座固定在箱体内的顶部,第二转轴的端部穿过箱体与旋转台连接;该搬运机器人有效地把吸盘和机械夹爪结合在一起,方便了对现有机械零件的转移,功能丰富,使用方便。