
一种新型工业用机械臂及其使用方法.pdf

雨巷****珺琦

1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种新型工业用机械臂及其使用方法.pdf
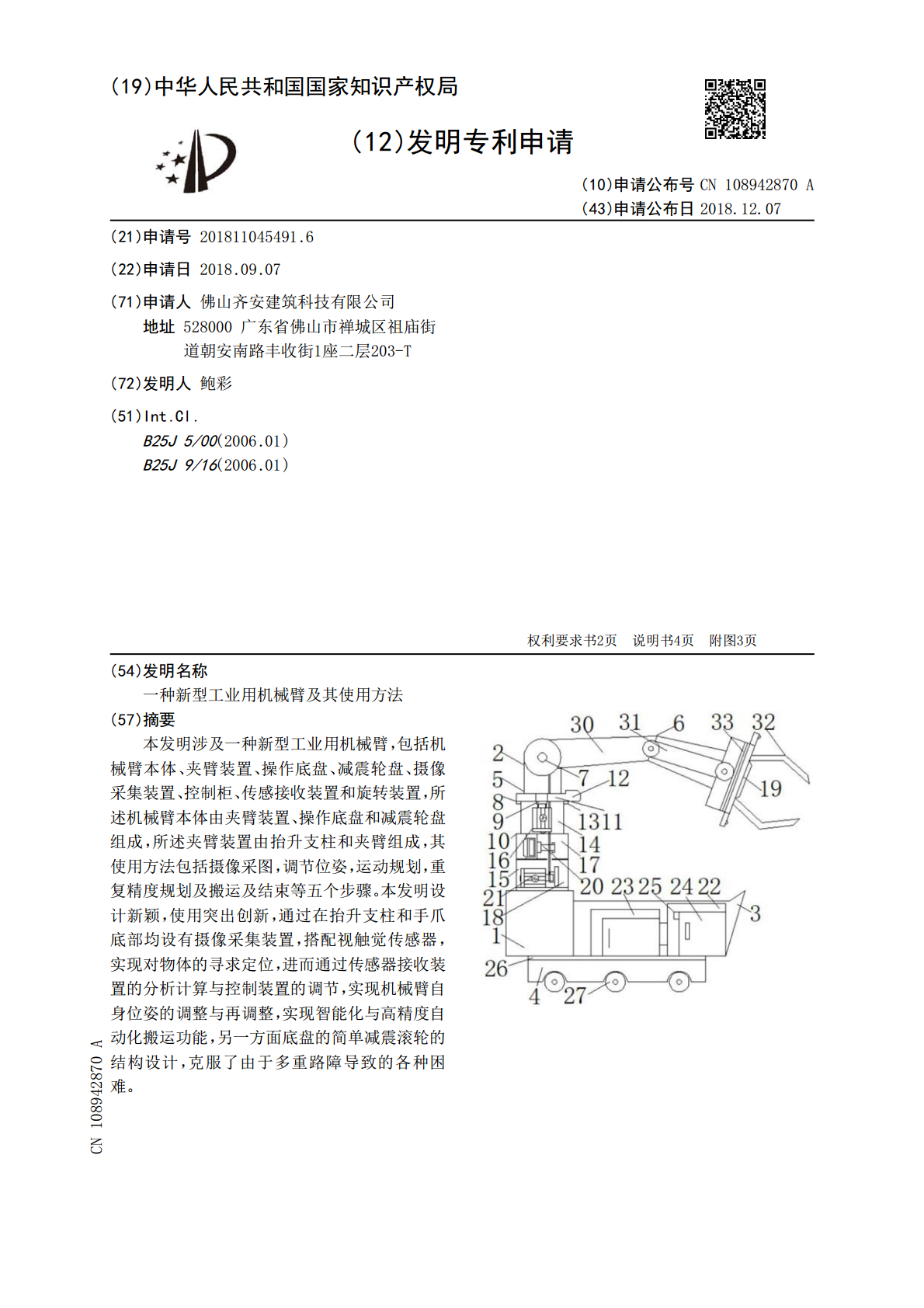
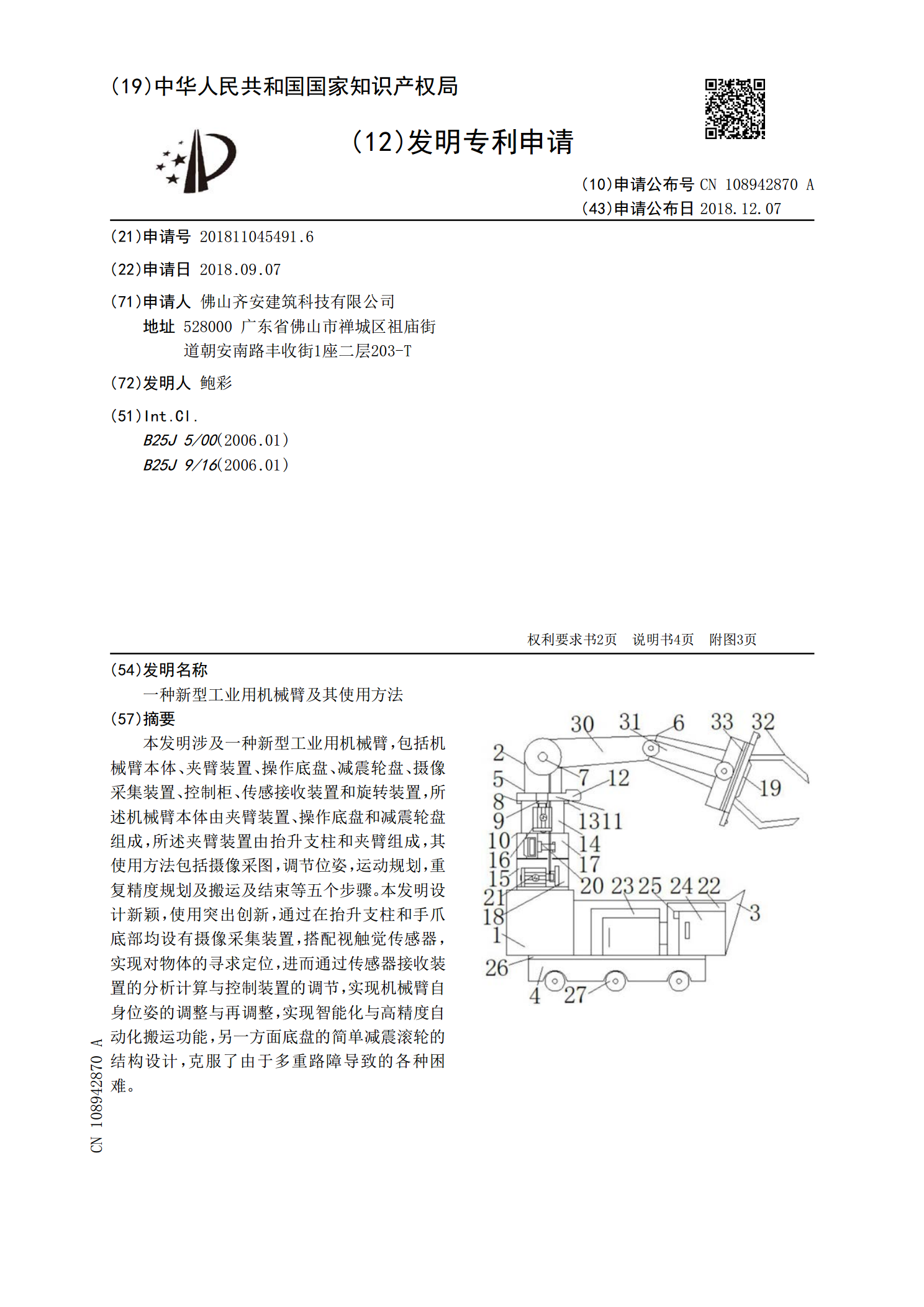
本发明涉及一种新型工业用机械臂,包括机械臂本体、夹臂装置、操作底盘、减震轮盘、摄像采集装置、控制柜、传感接收装置和旋转装置,所述机械臂本体由夹臂装置、操作底盘和减震轮盘组成,所述夹臂装置由抬升支柱和夹臂组成,其使用方法包括摄像采图,调节位姿,运动规划,重复精度规划及搬运及结束等五个步骤。本发明设计新颖,使用突出创新,通过在抬升支柱和手爪底部均设有摄像采集装置,搭配视触觉传感器,实现对物体的寻求定位,进而通过传感器接收装置的分析计算与控制装置的调节,实现机械臂自身位姿的调整与再调整,实现智能化与高精度自动化

一种提升机械臂及其使用方法.pdf
本发明公开了一种提升机械臂及其使用方法,包括主支撑柱、第一横臂组件和第二横臂组件,第一横臂组件和第二横臂组件分别安装在主支撑柱的两侧,主支撑柱的外侧安装有滑套组件,滑套组件包括套体、第一步进电机、第一锥齿轮、第二锥齿轮和摩擦轮,第一横臂组件包括夹手、托起臂、第一气缸和第一伸出臂,第二横臂组件包括负重、平衡臂、第二气缸和第二伸出臂;本发明提出的提升机械臂其使用方法,夹手和负重分别朝向两端,夹手用于夹住货物,夹手的活动范围广,负重可以保证整个装置的重心平稳性,保证整个装置不会发生倾覆,货物不仅可以上下移动,还

一种机械臂升降结构及其使用方法.pdf
本发明涉及机械臂设备技术领域,尤其是涉及一种机械臂升降结构,包括底架以及机械爪,底架的前端安装有机架,机架底部和底架顶面上均安装有固定架,固定架上安装有折叠轮,机架上安装有定滑轮组件,底架顶面安装有卷扬机,卷扬机上卷绕的提升钢丝绳滑动绕过定滑轮组件且传动连接机械爪,将机械爪安装在设备上,使得机械爪的位置能够自由改变,不会受限于厂房空间,且能够将机械爪转移至工件处,使用方便灵活,减少占用空间。

一种微型机械臂及其使用方法.pdf
本发明涉及一种微型机械臂及其使用方法,机械臂包括臂架、与臂架固接的电机、固设在电机轴上的主动带轮和一端套设在主动带轮上的传送带,所述电机轴沿臂架长度方向延伸,臂架上还轴接有沿臂架高度方向延伸的张紧改向轮和沿臂架宽度方向延伸的执行转轴,执行转轴上安装有从动带轮,所述传动带绕过张紧改向轮且另一端套设在从动带轮上。本发明利用传送带实现了电机扭矩的垂直变向传递,缩小了机械臂的宽度尺寸,从而减小了占用空间,适合小型或微型机器人使用。

一种汽车轮胎安装检测用机械臂及其使用方法.pdf
发明属于机械臂相关领域,为一种汽车轮胎安装检测用机械臂及其使用方法,一种汽车轮胎安装检测用机械臂及其使用方法,包括壳体,所述壳体左侧设有机械壁装置,所述机械壁装置用于控制轮胎夹取时的移动状态,所述壳体右侧设有转盘,所述转盘上设有轮胎紧固装置,所述轮胎紧固装置用于固定以及安装目标轮胎。本发明使用于汽车生产车间对汽车进行轮胎轮毂的安装,以及对轮胎进行正反和磨损度的检测,能在夹取轮胎的同时自动分辨轮胎的正反,并通过U型滑轨调整位置,通过传感器将数据传送到电脑进行判断,在分辨轮胎正反向的同时,能够同时检测轮胎磨损