
一种绳索驱动可穿戴式上肢康复训练机器人及其使用方法.pdf

景福****90


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种绳索驱动可穿戴式上肢康复训练机器人及其使用方法.pdf
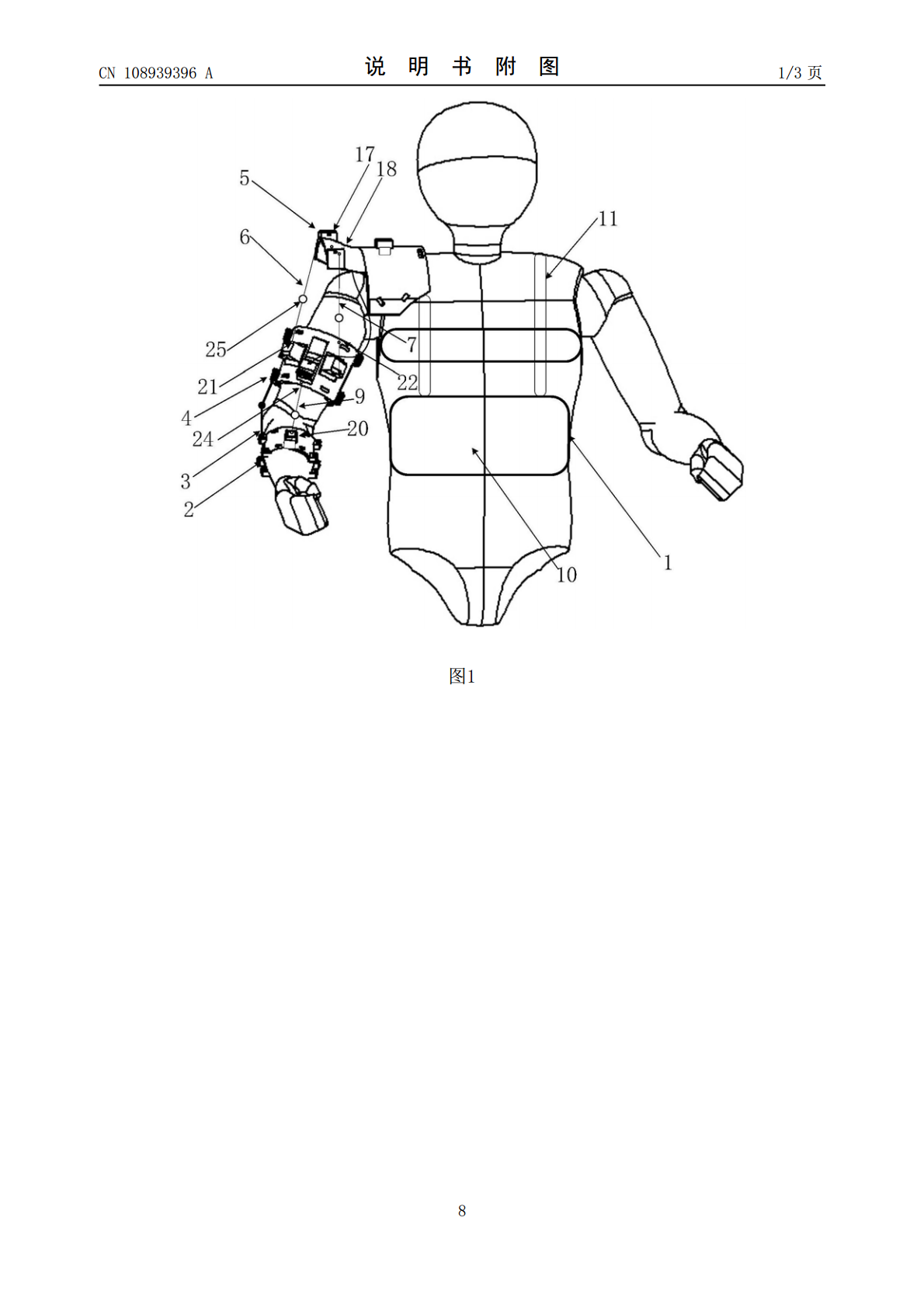
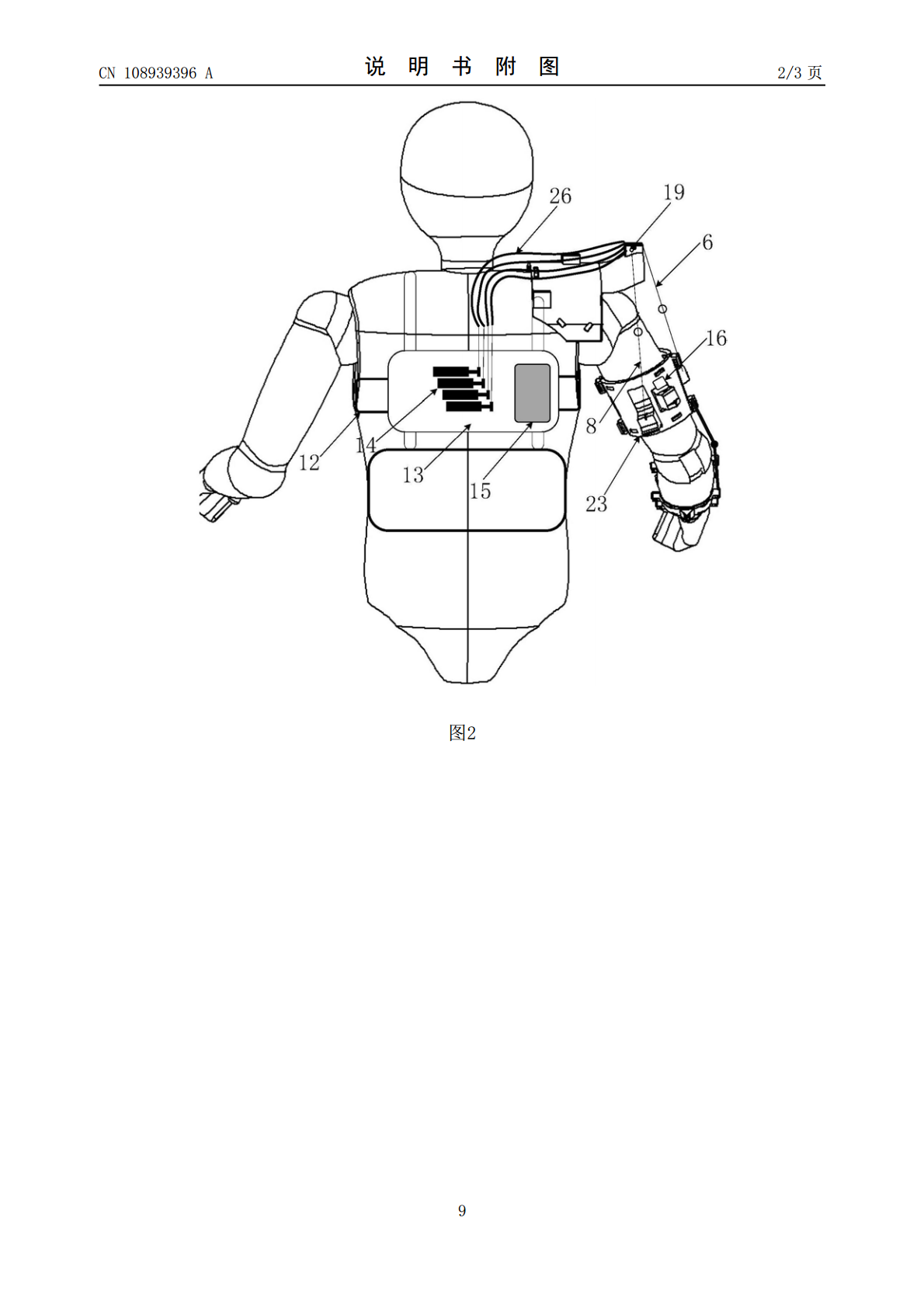
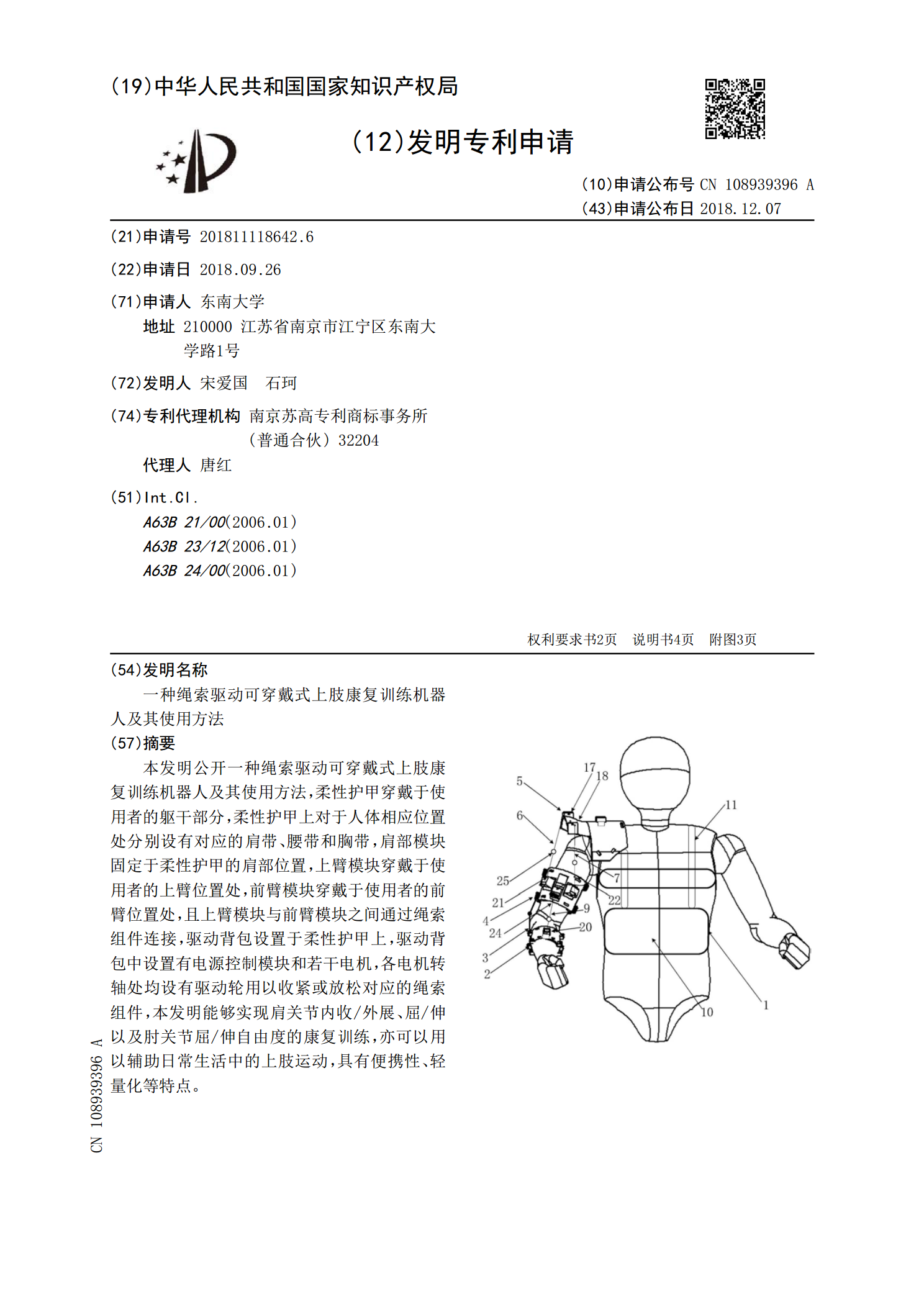
本发明公开一种绳索驱动可穿戴式上肢康复训练机器人及其使用方法,柔性护甲穿戴于使用者的躯干部分,柔性护甲上对于人体相应位置处分别设有对应的肩带、腰带和胸带,肩部模块固定于柔性护甲的肩部位置,上臂模块穿戴于使用者的上臂位置处,前臂模块穿戴于使用者的前臂位置处,且上臂模块与前臂模块之间通过绳索组件连接,驱动背包设置于柔性护甲上,驱动背包中设置有电源控制模块和若干电机,各电机转轴处均设有驱动轮用以收紧或放松对应的绳索组件,本发明能够实现肩关节内收/外展、屈/伸以及肘关节屈/伸自由度的康复训练,亦可以用以辅助日常生
一种基于绳索驱动的上肢康复机器人.pdf
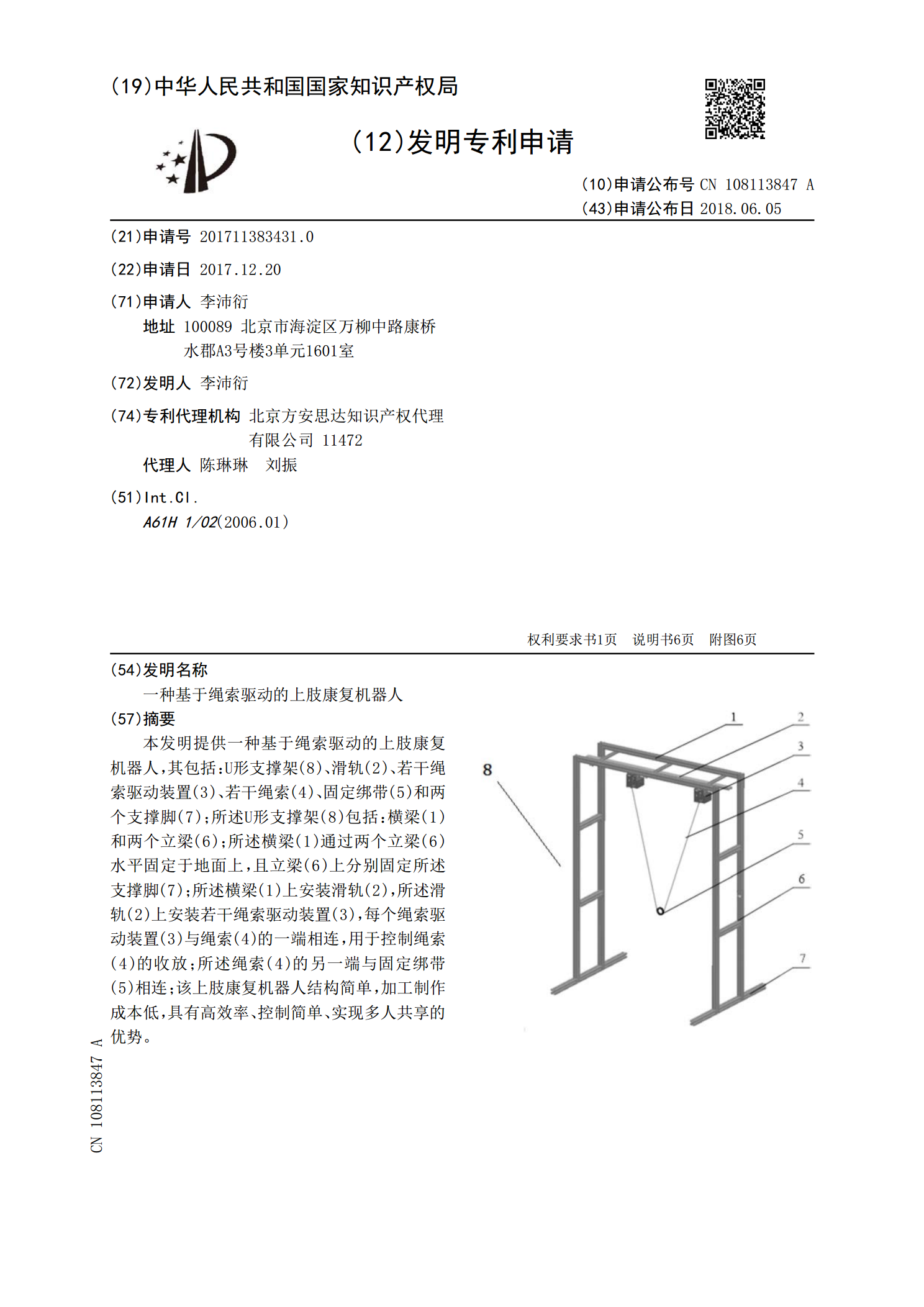
本发明提供一种基于绳索驱动的上肢康复机器人,其包括:U形支撑架(8)、滑轨(2)、若干绳索驱动装置(3)、若干绳索(4)、固定绑带(5)和两个支撑脚(7);所述U形支撑架(8)包括:横梁(1)和两个立梁(6);所述横梁(1)通过两个立梁(6)水平固定于地面上,且立梁(6)上分别固定所述支撑脚(7);所述横梁(1)上安装滑轨(2),所述滑轨(2)上安装若干绳索驱动装置(3),每个绳索驱动装置(3)与绳索(4)的一端相连,用于控制绳索(4)的收放;所述绳索(4)的另一端与固定绑带(5)相连;该上肢康复机器人结
一种神经电刺激的上肢康复训练机器人及其使用方法.pdf
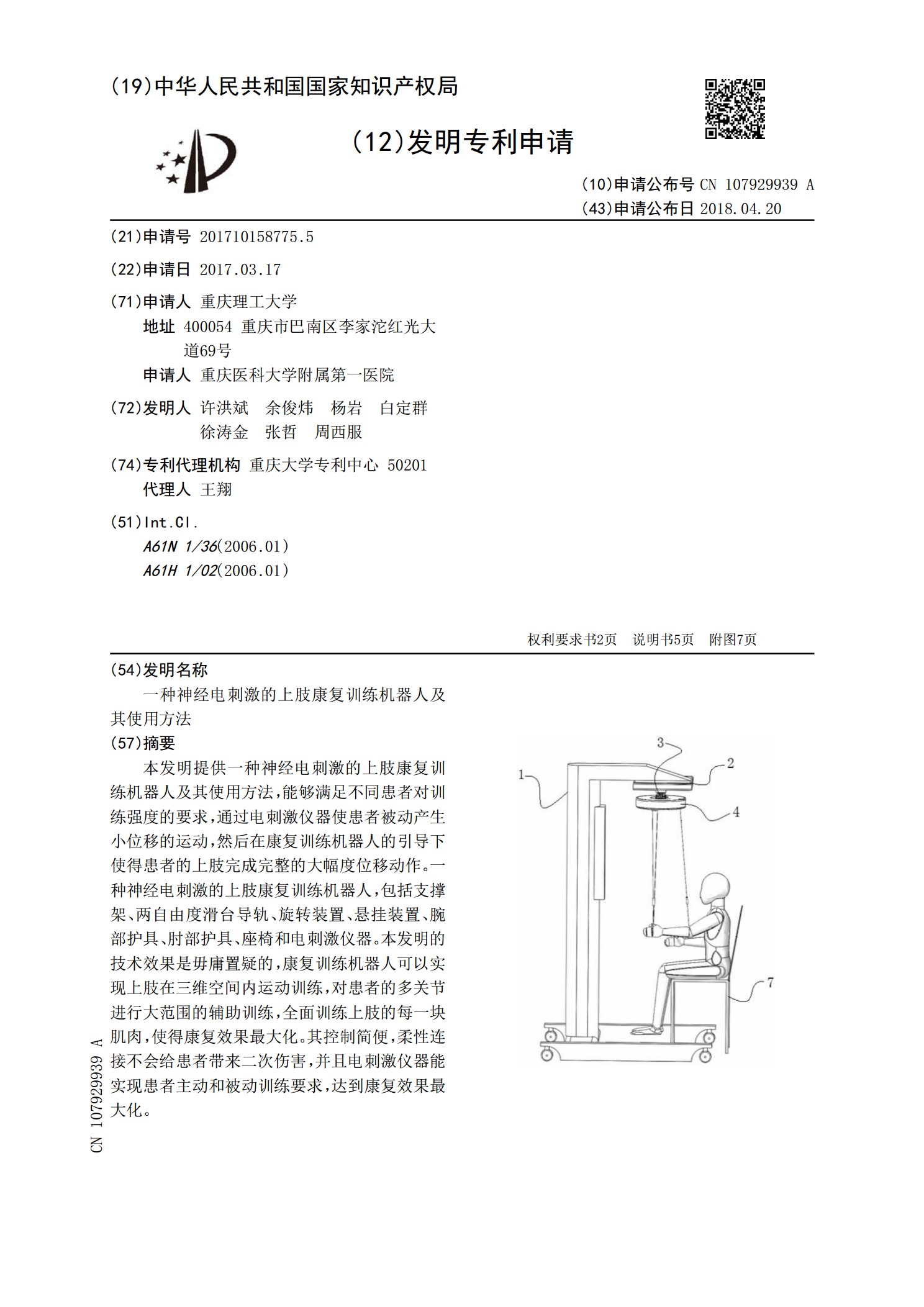
本发明提供一种神经电刺激的上肢康复训练机器人及其使用方法,能够满足不同患者对训练强度的要求,通过电刺激仪器使患者被动产生小位移的运动,然后在康复训练机器人的引导下使得患者的上肢完成完整的大幅度位移动作。一种神经电刺激的上肢康复训练机器人,包括支撑架、两自由度滑台导轨、旋转装置、悬挂装置、腕部护具、肘部护具、座椅和电刺激仪器。本发明的技术效果是毋庸置疑的,康复训练机器人可以实现上肢在三维空间内运动训练,对患者的多关节进行大范围的辅助训练,全面训练上肢的每一块肌肉,使得康复效果最大化。其控制简便,柔性连接不会
一种穿戴式上肢仿生柔性外骨骼机器人及其助力方法.pdf
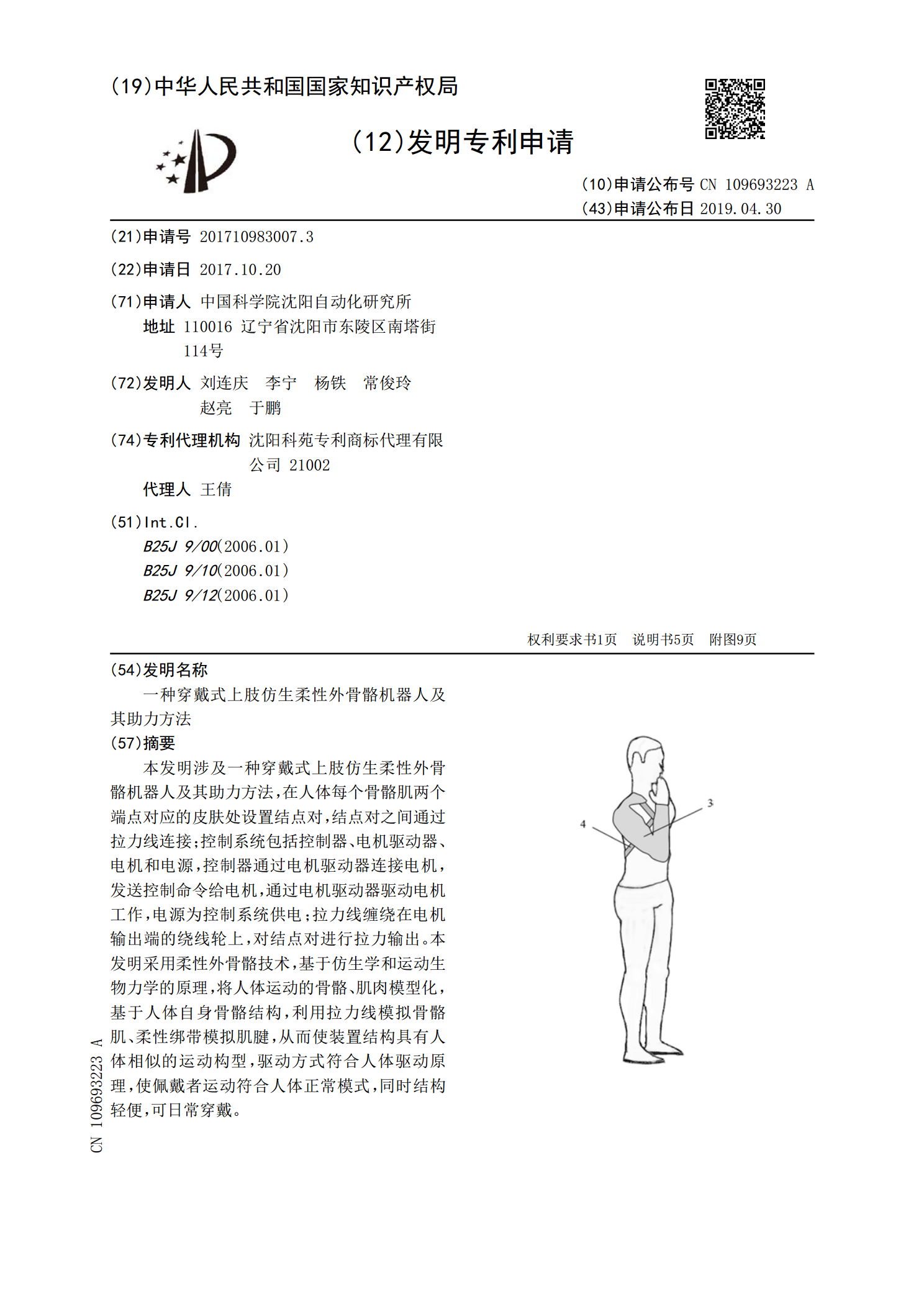
本发明涉及一种穿戴式上肢仿生柔性外骨骼机器人及其助力方法,在人体每个骨骼肌两个端点对应的皮肤处设置结点对,结点对之间通过拉力线连接;控制系统包括控制器、电机驱动器、电机和电源,控制器通过电机驱动器连接电机,发送控制命令给电机,通过电机驱动器驱动电机工作,电源为控制系统供电;拉力线缠绕在电机输出端的绕线轮上,对结点对进行拉力输出。本发明采用柔性外骨骼技术,基于仿生学和运动生物力学的原理,将人体运动的骨骼、肌肉模型化,基于人体自身骨骼结构,利用拉力线模拟骨骼肌、柔性绑带模拟肌腱,从而使装置结构具有人体相似的运
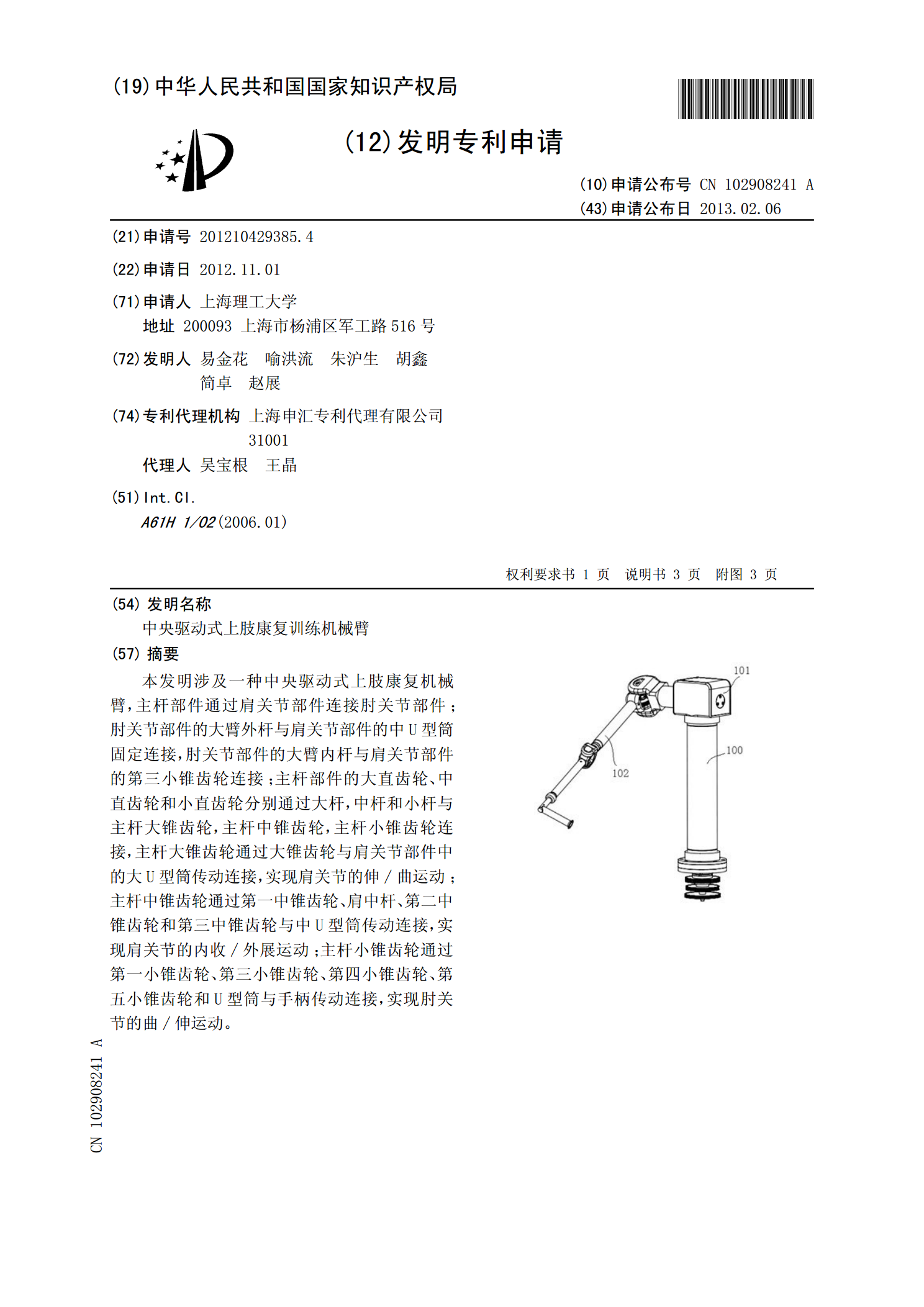
中央驱动式上肢康复训练机械臂.pdf
本发明涉及一种中央驱动式上肢康复机械臂,主杆部件通过肩关节部件连接肘关节部件;肘关节部件的大臂外杆与肩关节部件的中U型筒固定连接,肘关节部件的大臂内杆与肩关节部件的第三小锥齿轮连接;主杆部件的大直齿轮、中直齿轮和小直齿轮分别通过大杆,中杆和小杆与主杆大锥齿轮,主杆中锥齿轮,主杆小锥齿轮连接,主杆大锥齿轮通过大锥齿轮与肩关节部件中的大U型筒传动连接,实现肩关节的伸/曲运动;主杆中锥齿轮通过第一中锥齿轮、肩中杆、第二中锥齿轮和第三中锥齿轮与中U型筒传动连接,实现肩关节的内收/外展运动;主杆小锥齿轮通过第一小锥