
一种穿戴式上肢仿生柔性外骨骼机器人及其助力方法.pdf

一条****涛k

1/10

2/10
3/10

4/10

5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种穿戴式上肢仿生柔性外骨骼机器人及其助力方法.pdf
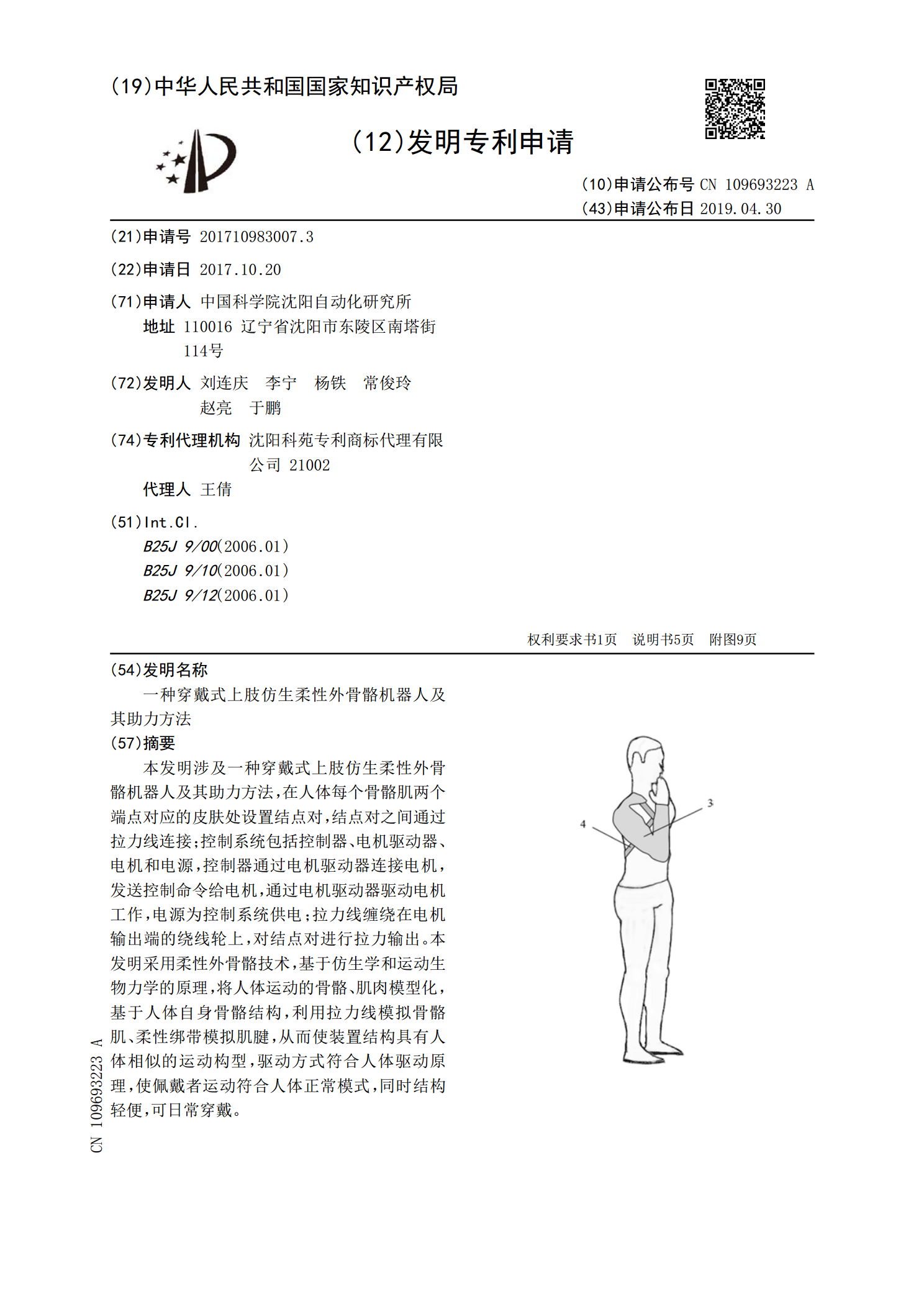
本发明涉及一种穿戴式上肢仿生柔性外骨骼机器人及其助力方法,在人体每个骨骼肌两个端点对应的皮肤处设置结点对,结点对之间通过拉力线连接;控制系统包括控制器、电机驱动器、电机和电源,控制器通过电机驱动器连接电机,发送控制命令给电机,通过电机驱动器驱动电机工作,电源为控制系统供电;拉力线缠绕在电机输出端的绕线轮上,对结点对进行拉力输出。本发明采用柔性外骨骼技术,基于仿生学和运动生物力学的原理,将人体运动的骨骼、肌肉模型化,基于人体自身骨骼结构,利用拉力线模拟骨骼肌、柔性绑带模拟肌腱,从而使装置结构具有人体相似的运
一种用于穿戴的柔性传动上肢外骨骼机器人.pdf
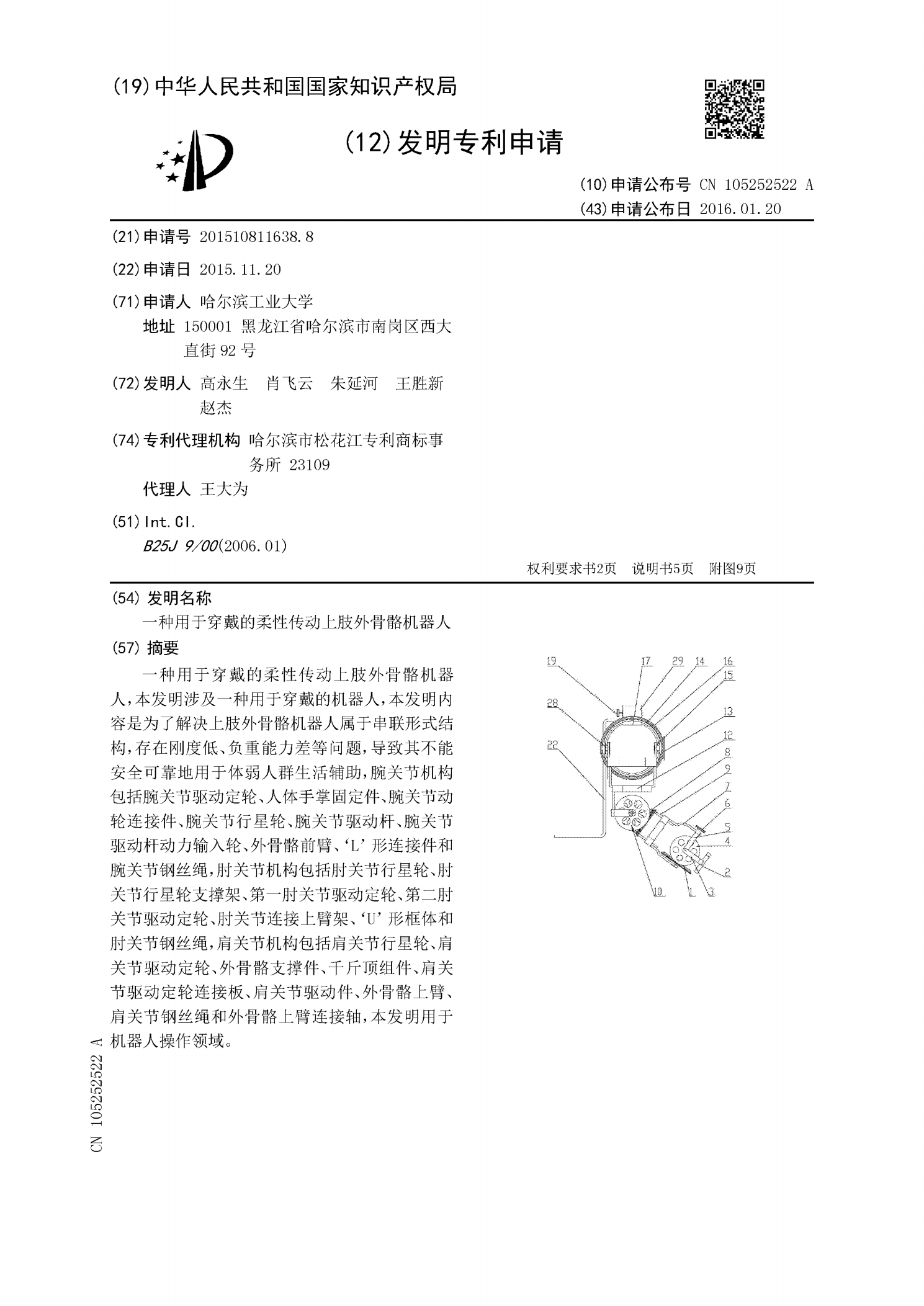
一种用于穿戴的柔性传动上肢外骨骼机器人,本发明涉及一种用于穿戴的机器人,本发明内容是为了解决上肢外骨骼机器人属于串联形式结构,存在刚度低、负重能力差等问题,导致其不能安全可靠地用于体弱人群生活辅助,腕关节机构包括腕关节驱动定轮、人体手掌固定件、腕关节动轮连接件、腕关节行星轮、腕关节驱动杆、腕关节驱动杆动力输入轮、外骨骼前臂、‘L’形连接件和腕关节钢丝绳,肘关节机构包括肘关节行星轮、肘关节行星轮支撑架、第一肘关节驱动定轮、第二肘关节驱动定轮、肘关节连接上臂架、‘U’形框体和肘关节钢丝绳,肩关节机构包括肩关节
穿戴式助力外骨骼机器人.pdf
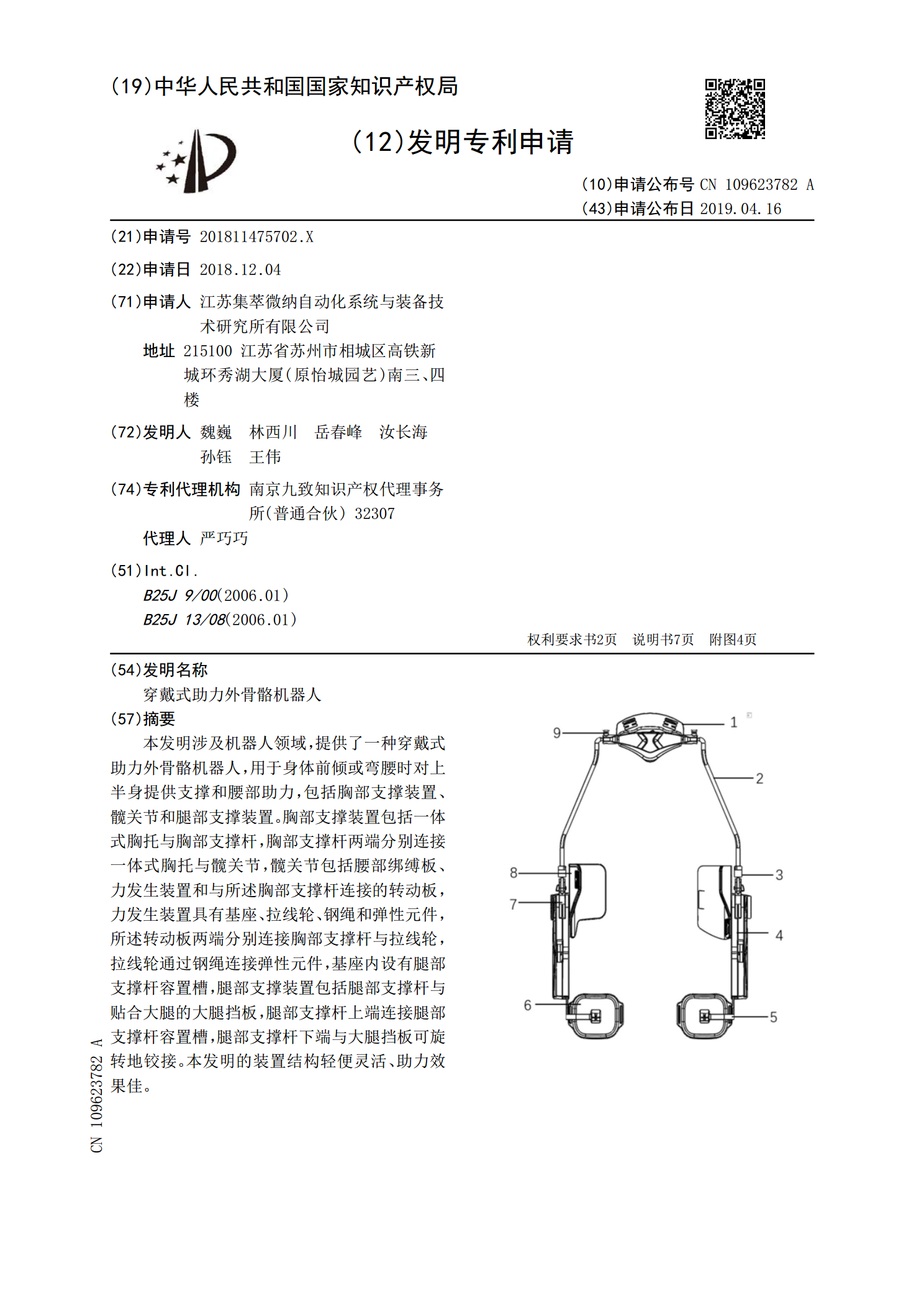
本发明涉及机器人领域,提供了一种穿戴式助力外骨骼机器人,用于身体前倾或弯腰时对上半身提供支撑和腰部助力,包括胸部支撑装置、髋关节和腿部支撑装置。胸部支撑装置包括一体式胸托与胸部支撑杆,胸部支撑杆两端分别连接一体式胸托与髋关节,髋关节包括腰部绑缚板、力发生装置和与所述胸部支撑杆连接的转动板,力发生装置具有基座、拉线轮、钢绳和弹性元件,所述转动板两端分别连接胸部支撑杆与拉线轮,拉线轮通过钢绳连接弹性元件,基座内设有腿部支撑杆容置槽,腿部支撑装置包括腿部支撑杆与贴合大腿的大腿挡板,腿部支撑杆上端连接腿部支撑杆容

一种穿戴式柔性随动助力外骨骼辅助设备.pdf
穿戴式柔性随动助力外骨骼辅助设备,包括背板、背箱、背箱翻转组件、髋关节组件、大腿组件、膝关节组件、小腿组件、踝关节组件、足部贴合组件和座椅支撑杆;背板顶部设置有背箱翻转组件,背箱设置在背板的一侧,背板的另一侧贴合人体;两个髋关节组件左右对称安装于背板的下方,每个髋关节组件上均依次连接有大腿组件、膝关节组件、小腿组件、踝关节组件以及足部贴合组件;足部贴合组件上设置有座椅支撑杆,当小腿组件靠近大腿组件时,座椅支撑杆能够顶在大腿组件上形成隐形座椅。本发明座椅支撑杆开至最大限度位置时,支撑杆上端与前文所述的大腿组
一种助力上肢外骨骼机器人.pdf
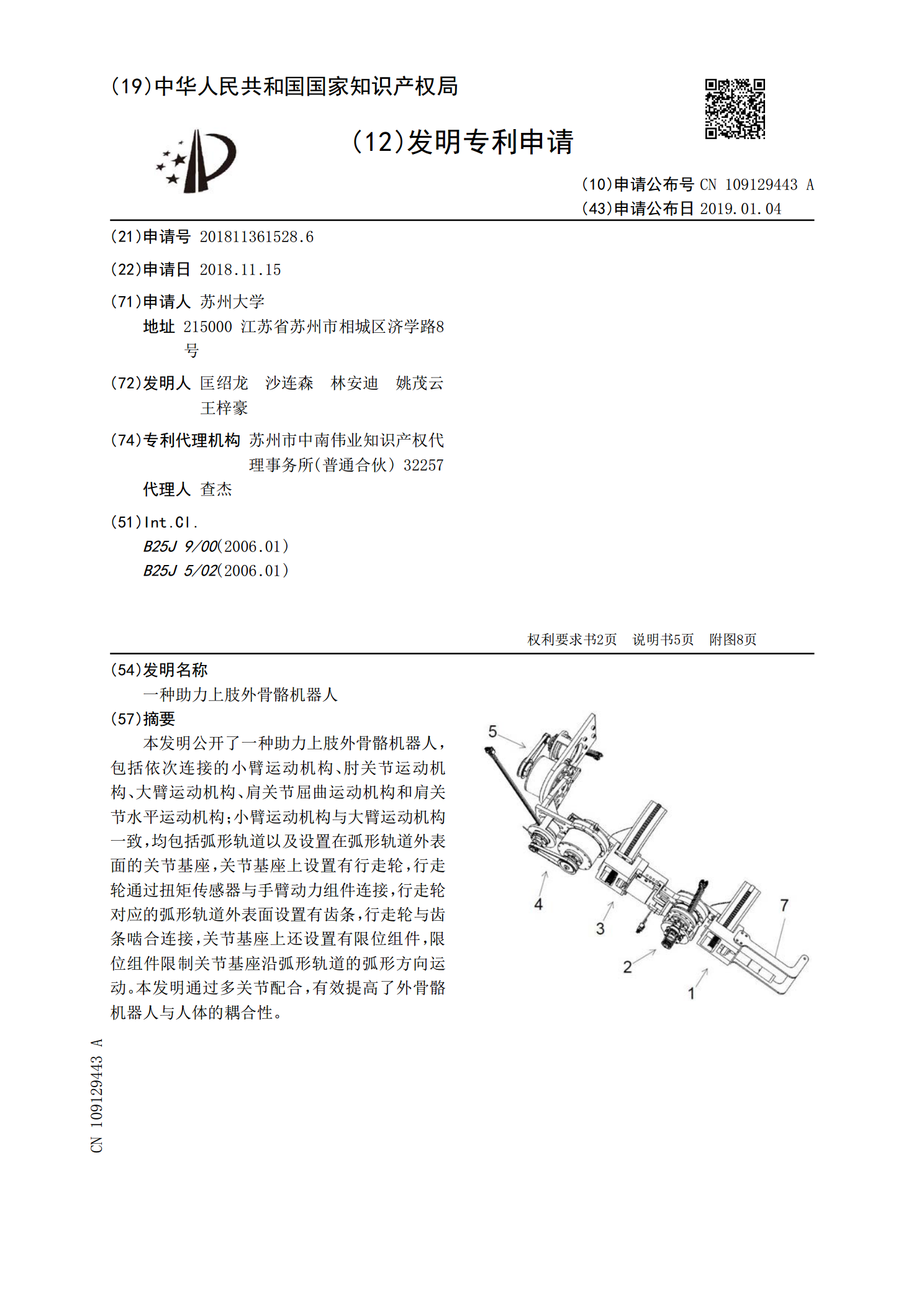
本发明公开了一种助力上肢外骨骼机器人,包括依次连接的小臂运动机构、肘关节运动机构、大臂运动机构、肩关节屈曲运动机构和肩关节水平运动机构;小臂运动机构与大臂运动机构一致,均包括弧形轨道以及设置在弧形轨道外表面的关节基座,关节基座上设置有行走轮,行走轮通过扭矩传感器与手臂动力组件连接,行走轮对应的弧形轨道外表面设置有齿条,行走轮与齿条啮合连接,关节基座上还设置有限位组件,限位组件限制关节基座沿弧形轨道的弧形方向运动。本发明通过多关节配合,有效提高了外骨骼机器人与人体的耦合性。