
一种轮椅座椅自动调平的装置及控制方法.pdf

邻家****曼玉

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种轮椅座椅自动调平的装置及控制方法.pdf
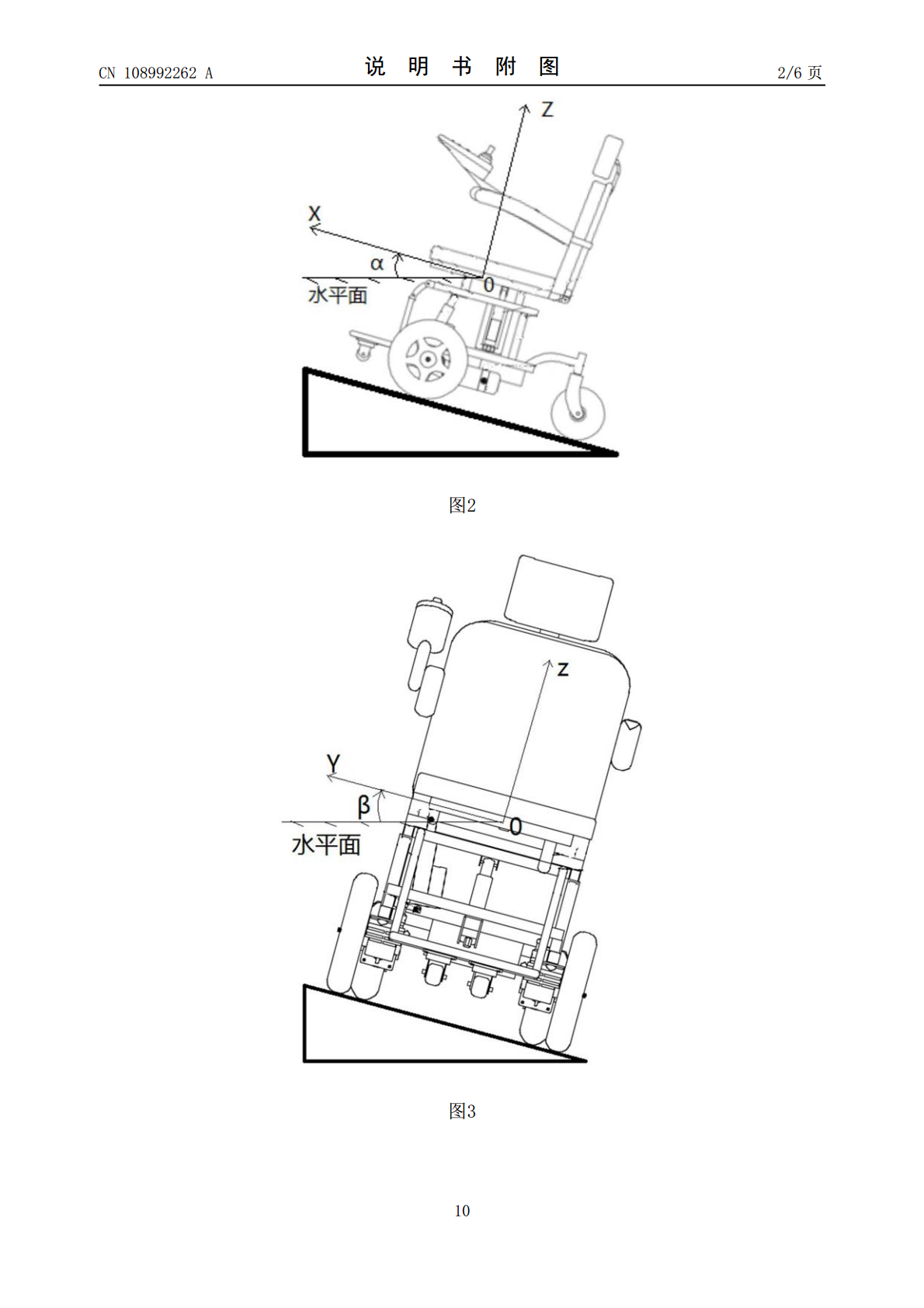
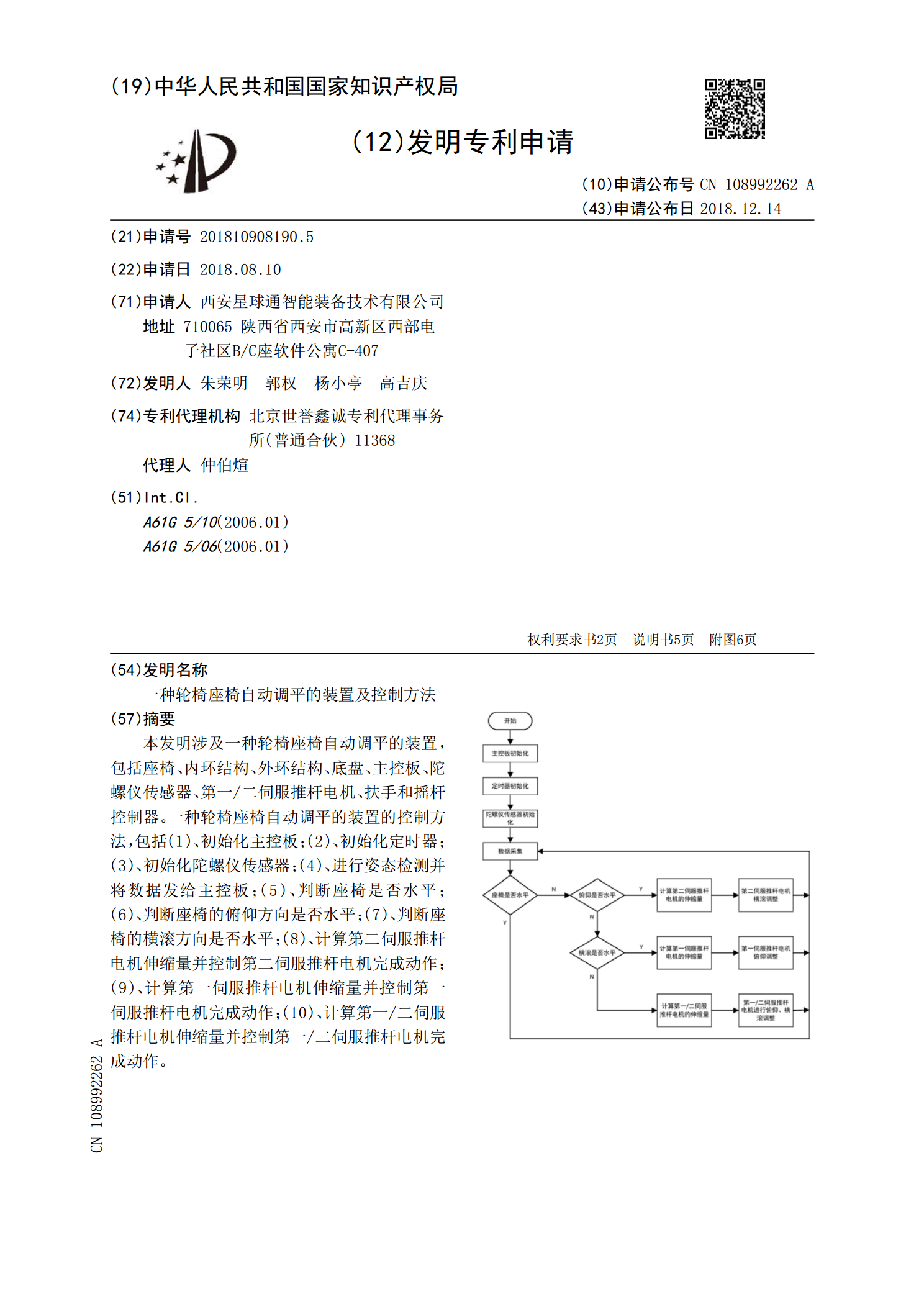
本发明涉及一种轮椅座椅自动调平的装置,包括座椅、内环结构、外环结构、底盘、主控板、陀螺仪传感器、第一/二伺服推杆电机、扶手和摇杆控制器。一种轮椅座椅自动调平的装置的控制方法,包括(1)、初始化主控板;(2)、初始化定时器;(3)、初始化陀螺仪传感器;(4)、进行姿态检测并将数据发给主控板;(5)、判断座椅是否水平;(6)、判断座椅的俯仰方向是否水平;(7)、判断座椅的横滚方向是否水平;(8)、计算第二伺服推杆电机伸缩量并控制第二伺服推杆电机完成动作;(9)、计算第一伺服推杆电机伸缩量并控制第一伺服推杆电机
一种轮椅座椅调平升降机构及其控制方法.pdf
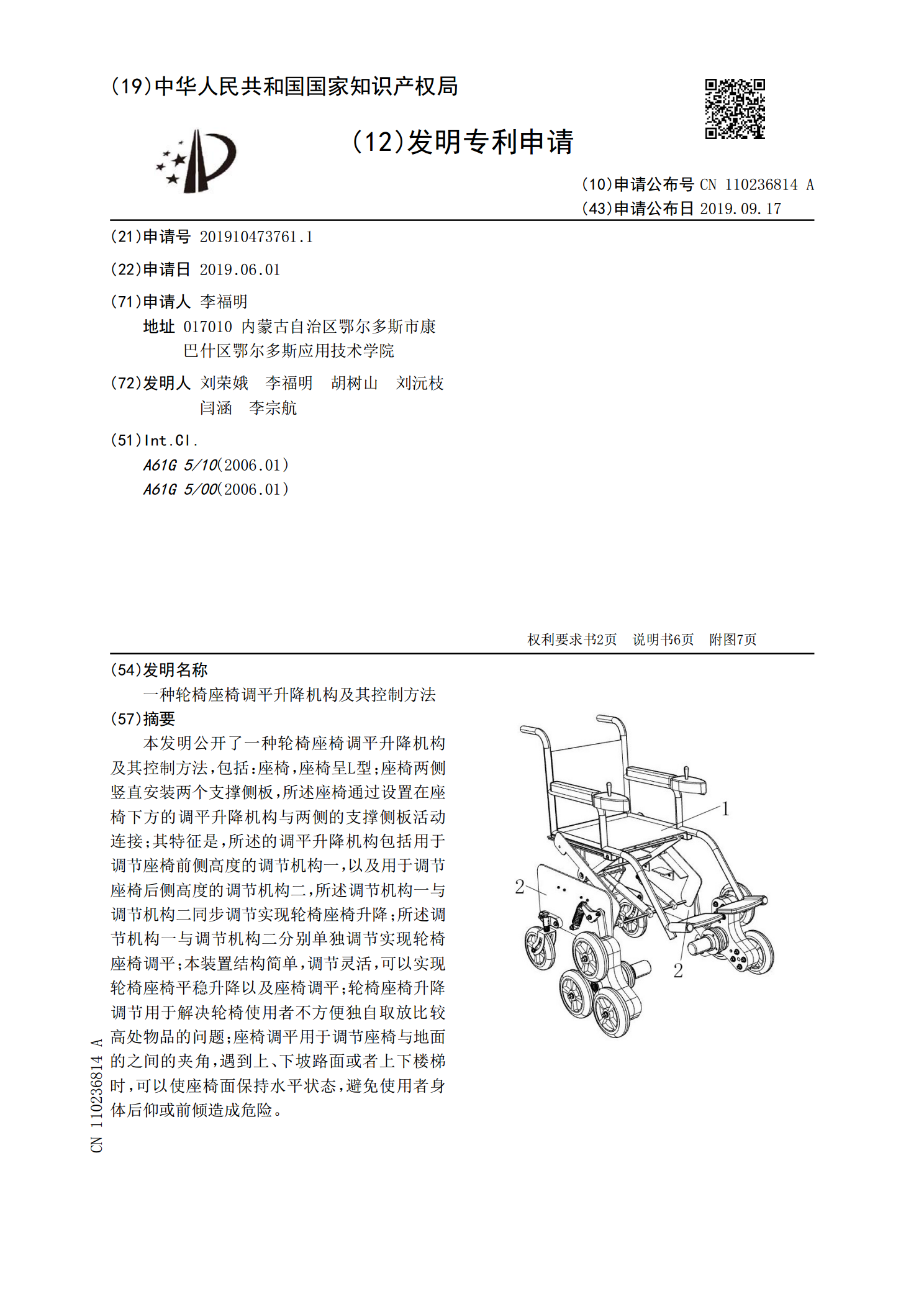
本发明公开了一种轮椅座椅调平升降机构及其控制方法,包括:座椅,座椅呈L型;座椅两侧竖直安装两个支撑侧板,所述座椅通过设置在座椅下方的调平升降机构与两侧的支撑侧板活动连接;其特征是,所述的调平升降机构包括用于调节座椅前侧高度的调节机构一,以及用于调节座椅后侧高度的调节机构二,所述调节机构一与调节机构二同步调节实现轮椅座椅升降;所述调节机构一与调节机构二分别单独调节实现轮椅座椅调平;本装置结构简单,调节灵活,可以实现轮椅座椅平稳升降以及座椅调平;轮椅座椅升降调节用于解决轮椅使用者不方便独自取放比较高处物品的问
一种车架自动调平系统、调平及安全控制方法.pdf
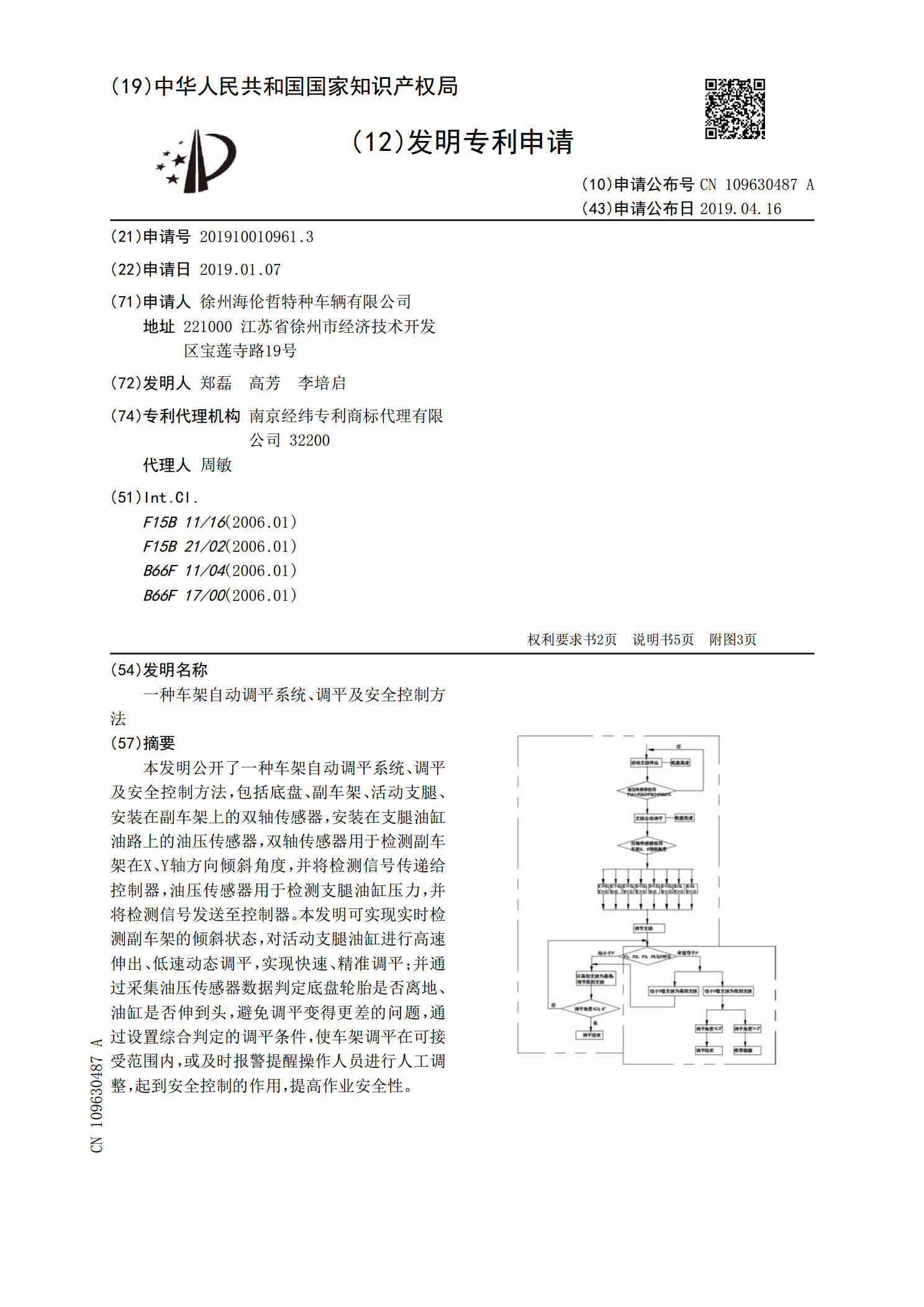
本发明公开了一种车架自动调平系统、调平及安全控制方法,包括底盘、副车架、活动支腿、安装在副车架上的双轴传感器,安装在支腿油缸油路上的油压传感器,双轴传感器用于检测副车架在X、Y轴方向倾斜角度,并将检测信号传递给控制器,油压传感器用于检测支腿油缸压力,并将检测信号发送至控制器。本发明可实现实时检测副车架的倾斜状态,对活动支腿油缸进行高速伸出、低速动态调平,实现快速、精准调平;并通过采集油压传感器数据判定底盘轮胎是否离地、油缸是否伸到头,避免调平变得更差的问题,通过设置综合判定的调平条件,使车架调平在可接受范
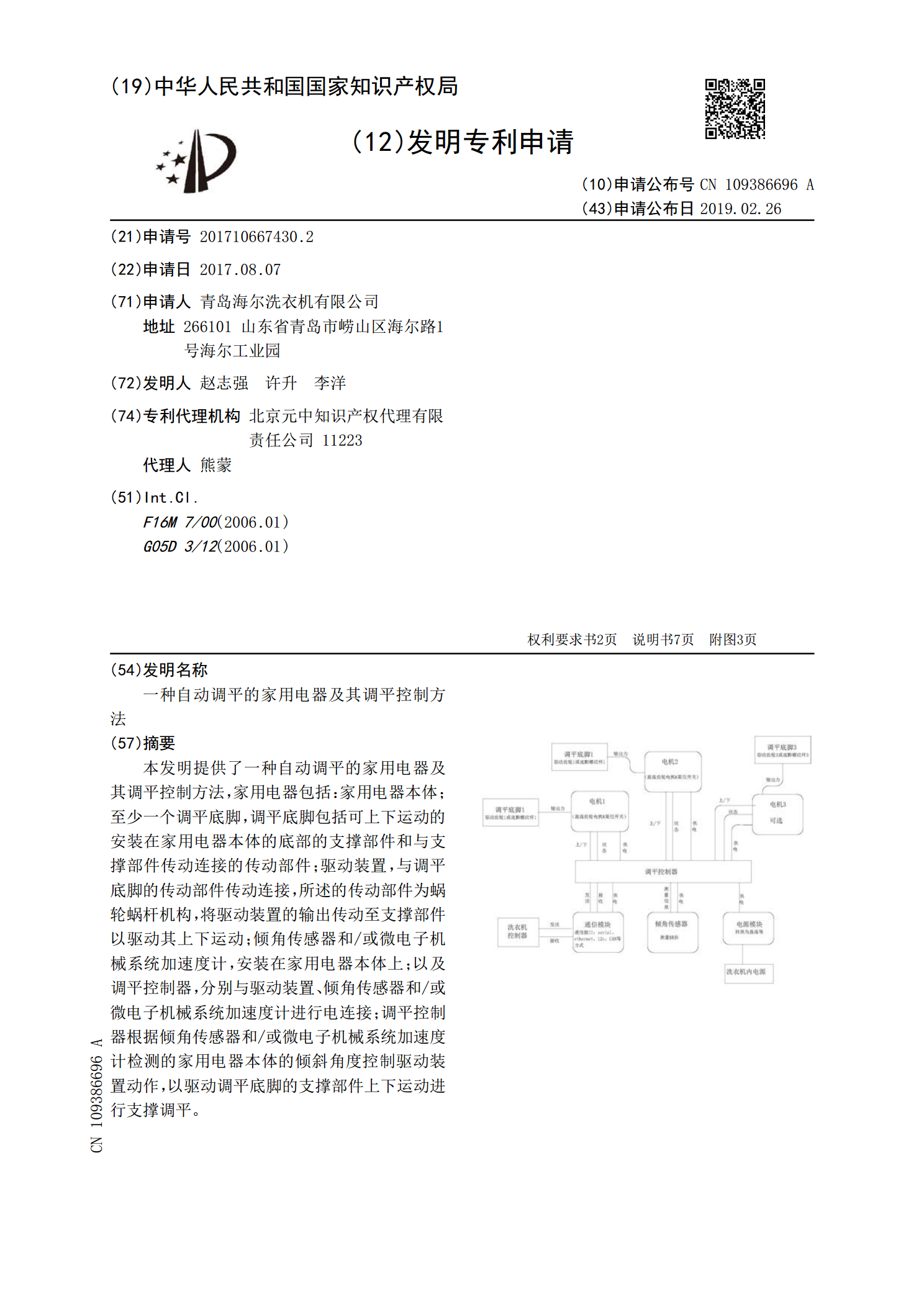
一种自动调平的家用电器及其调平控制方法.pdf
本发明提供了一种自动调平的家用电器及其调平控制方法,家用电器包括:家用电器本体;至少一个调平底脚,调平底脚包括可上下运动的安装在家用电器本体的底部的支撑部件和与支撑部件传动连接的传动部件;驱动装置,与调平底脚的传动部件传动连接,所述的传动部件为蜗轮蜗杆机构,将驱动装置的输出传动至支撑部件以驱动其上下运动;倾角传感器和/或微电子机械系统加速度计,安装在家用电器本体上;以及调平控制器,分别与驱动装置、倾角传感器和/或微电子机械系统加速度计进行电连接;调平控制器根据倾角传感器和/或微电子机械系统加速度计检测的家
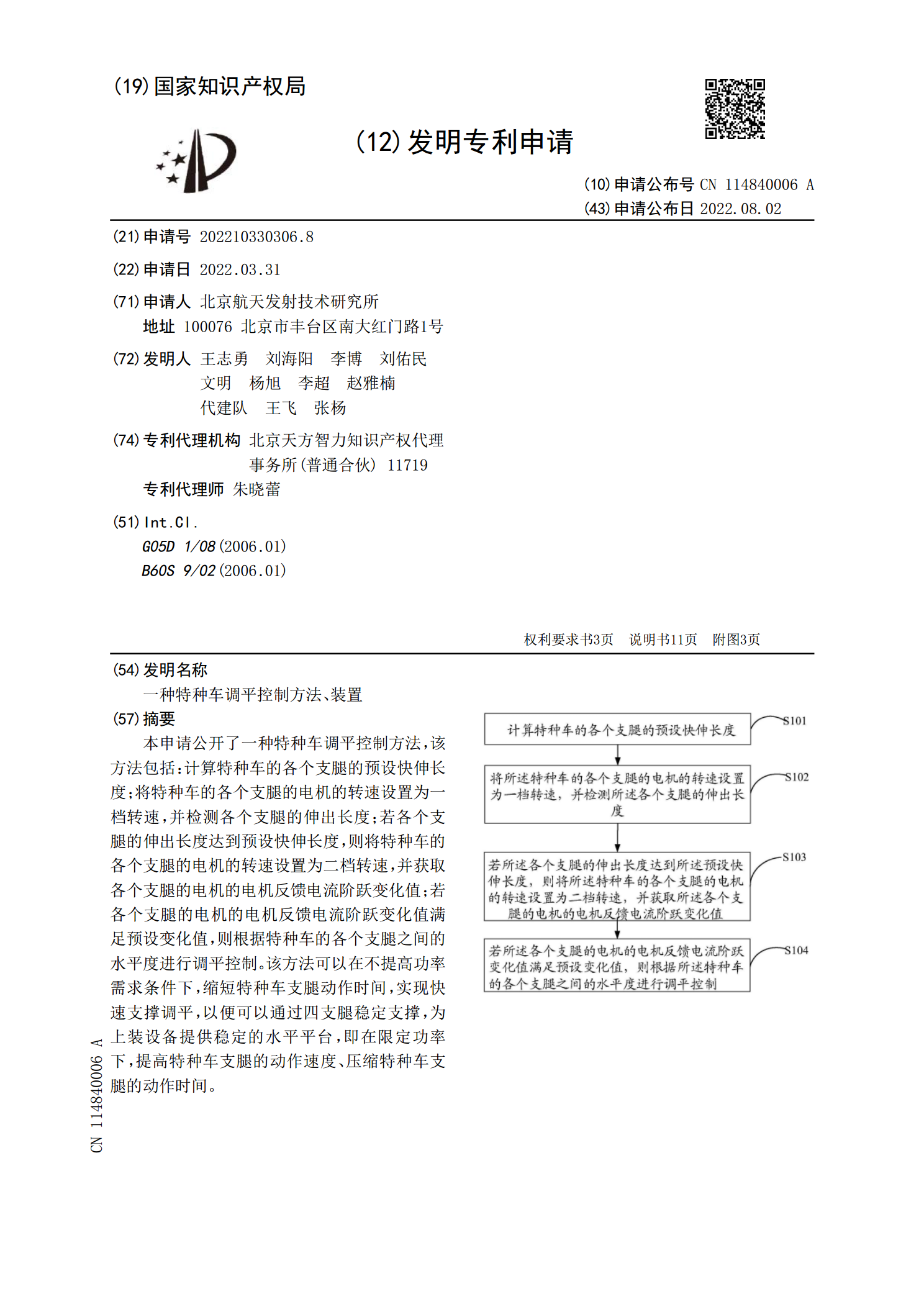
一种特种车调平控制方法、装置.pdf
本申请公开了一种特种车调平控制方法,该方法包括:计算特种车的各个支腿的预设快伸长度;将特种车的各个支腿的电机的转速设置为一档转速,并检测各个支腿的伸出长度;若各个支腿的伸出长度达到预设快伸长度,则将特种车的各个支腿的电机的转速设置为二档转速,并获取各个支腿的电机的电机反馈电流阶跃变化值;若各个支腿的电机的电机反馈电流阶跃变化值满足预设变化值,则根据特种车的各个支腿之间的水平度进行调平控制。该方法可以在不提高功率需求条件下,缩短特种车支腿动作时间,实现快速支撑调平,以便可以通过四支腿稳定支撑,为上装设备提供