
一种特种车调平控制方法、装置.pdf

鸿朗****ka


1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种特种车调平控制方法、装置.pdf
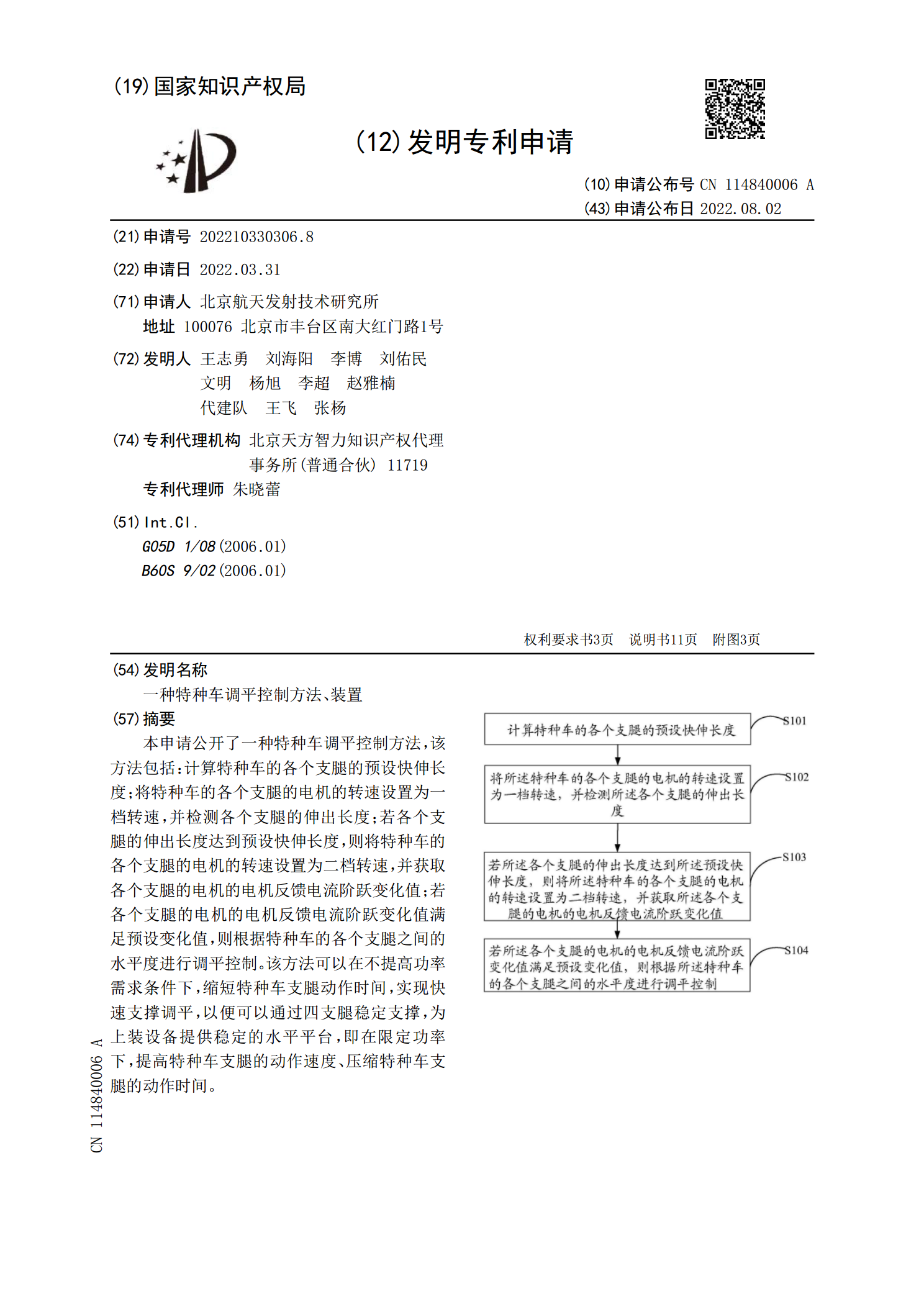
本申请公开了一种特种车调平控制方法,该方法包括:计算特种车的各个支腿的预设快伸长度;将特种车的各个支腿的电机的转速设置为一档转速,并检测各个支腿的伸出长度;若各个支腿的伸出长度达到预设快伸长度,则将特种车的各个支腿的电机的转速设置为二档转速,并获取各个支腿的电机的电机反馈电流阶跃变化值;若各个支腿的电机的电机反馈电流阶跃变化值满足预设变化值,则根据特种车的各个支腿之间的水平度进行调平控制。该方法可以在不提高功率需求条件下,缩短特种车支腿动作时间,实现快速支撑调平,以便可以通过四支腿稳定支撑,为上装设备提供

一种支撑装置的调平控制系统、方法及消防车.pdf
本发明提出了一种支撑装置的调平控制系统、方法及消防车,支撑装置包括固定架、支撑臂及支撑腿,该系统还包括:用于检测固定架倾角的倾角检测装置、用于检测各个支撑腿的下撑状态的支撑检测装置、用于控制各个支撑腿动作的支腿控制阀及控制器,倾角检测装置、支撑检测装置的信号输出端与控制器的信号输入端连接,控制器的信号输出端与支腿控制阀连接,控制器用于根据支撑检测装置的信号确定各个支撑腿是否下撑到位,用于根据倾角检测装置的信号判断四个支撑腿中最高的支撑腿,并用于在支撑装置调平是通过支腿控制阀每次控制除最高的支撑腿外的其中两
一种轮椅座椅自动调平的装置及控制方法.pdf
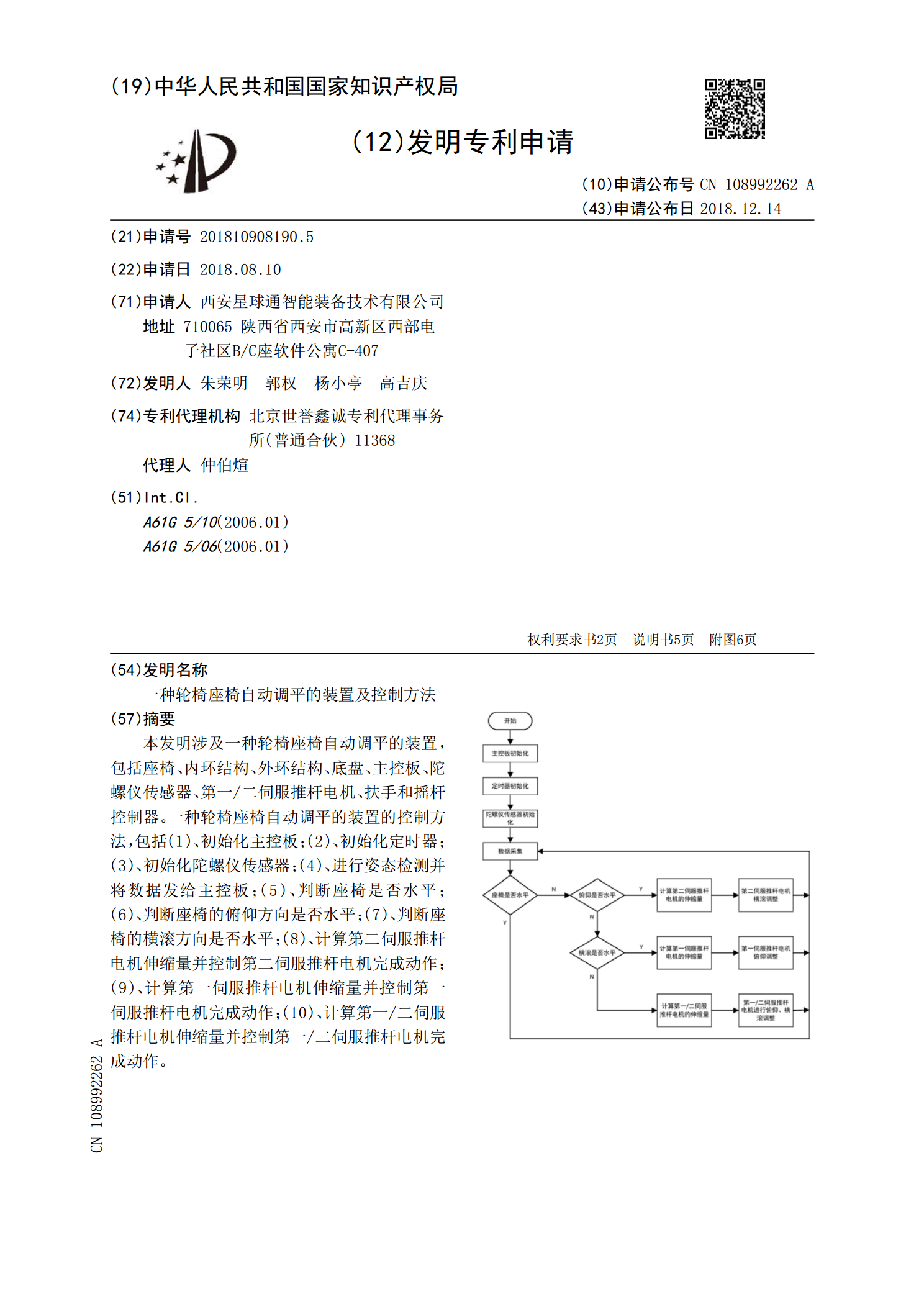
本发明涉及一种轮椅座椅自动调平的装置,包括座椅、内环结构、外环结构、底盘、主控板、陀螺仪传感器、第一/二伺服推杆电机、扶手和摇杆控制器。一种轮椅座椅自动调平的装置的控制方法,包括(1)、初始化主控板;(2)、初始化定时器;(3)、初始化陀螺仪传感器;(4)、进行姿态检测并将数据发给主控板;(5)、判断座椅是否水平;(6)、判断座椅的俯仰方向是否水平;(7)、判断座椅的横滚方向是否水平;(8)、计算第二伺服推杆电机伸缩量并控制第二伺服推杆电机完成动作;(9)、计算第一伺服推杆电机伸缩量并控制第一伺服推杆电机
一种海上发射装置调平结构及其控制方法.pdf
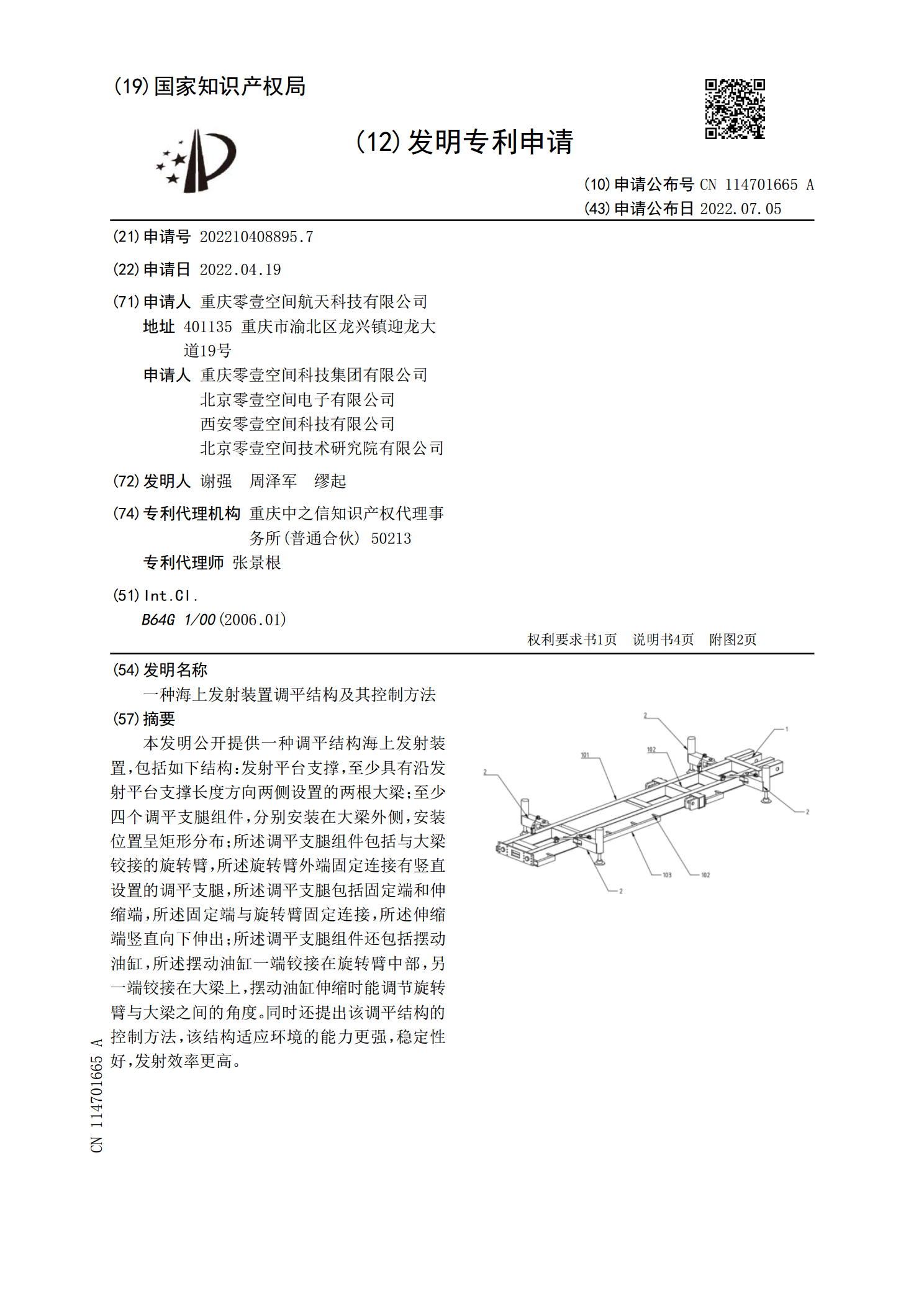
本发明公开提供一种调平结构海上发射装置,包括如下结构:发射平台支撑,至少具有沿发射平台支撑长度方向两侧设置的两根大梁;至少四个调平支腿组件,分别安装在大梁外侧,安装位置呈矩形分布;所述调平支腿组件包括与大梁铰接的旋转臂,所述旋转臂外端固定连接有竖直设置的调平支腿,所述调平支腿包括固定端和伸缩端,所述固定端与旋转臂固定连接,所述伸缩端竖直向下伸出;所述调平支腿组件还包括摆动油缸,所述摆动油缸一端铰接在旋转臂中部,另一端铰接在大梁上,摆动油缸伸缩时能调节旋转臂与大梁之间的角度。同时还提出该调平结构的控制方法,

一种电动缸快速展车调平控制方法和系统.pdf
本发明提供了一种电动缸快速展车调平控制方法和系统,解决现有展车调平控制过程不适应电动缸的技术问题。方法包括:获取展车前车辆后梁的初始水平角度,根据初始水平角度设置电动缸驱动支腿的伸出长度、伸出同步状态和伸出速度的进给数据形成粗调过程;在粗调过程完成时判断当前水平度是否满足调平精度,不满足则根据当前水平度设置进给数据形成精调过程;判断精调过程中的水平度符合调平精度时,锁定支腿完成展车调平。通过水平角度测量反馈建立电动缸驱动的闭环控制过程,形成递进的粗调和精调过程,避免了展车调平过程受其他控制因素影响形成反复