
一种小型机械臂末端夹紧装置.pdf

是你****芹呀

1/7

2/7
3/7
4/7

5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种小型机械臂末端夹紧装置.pdf
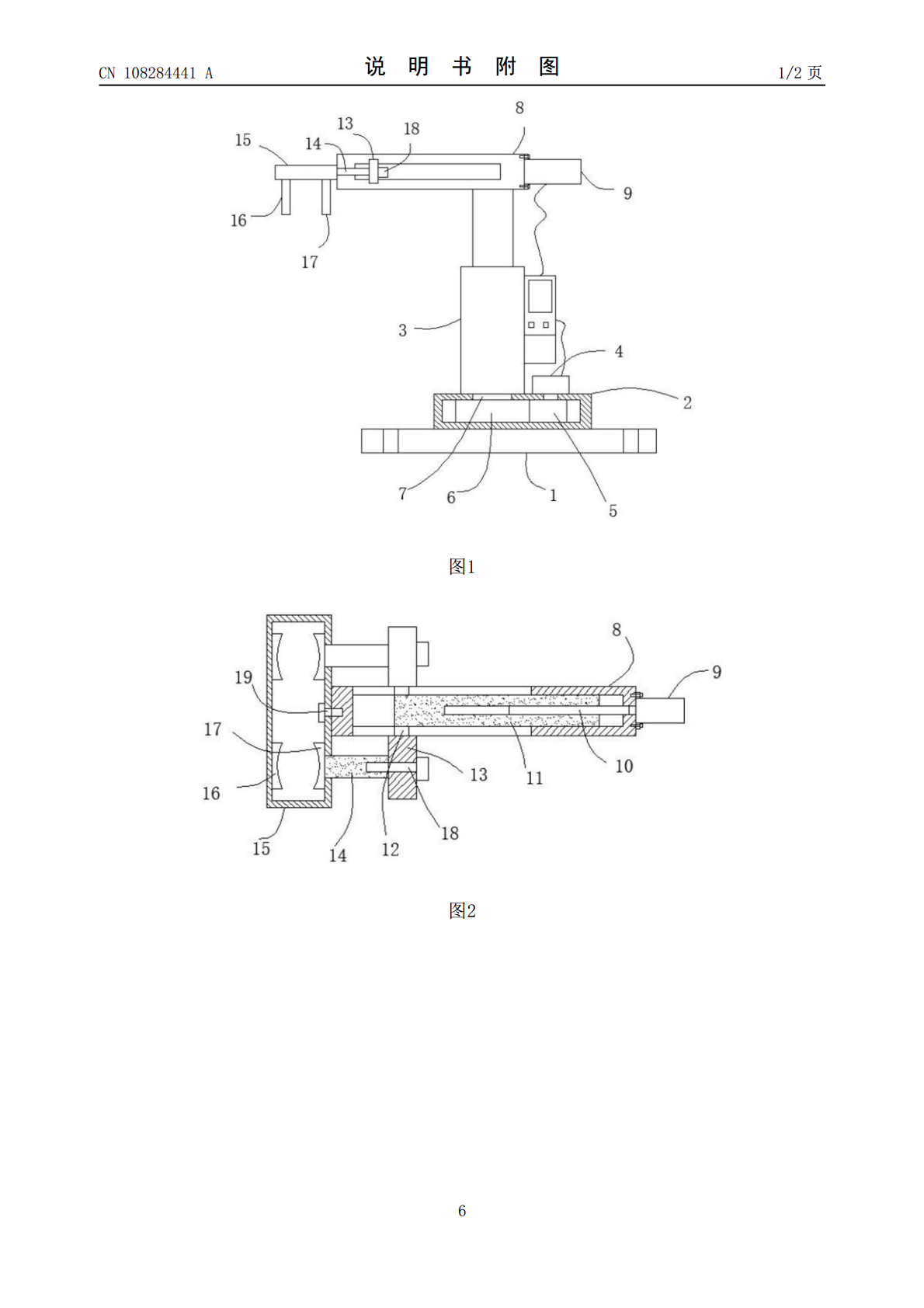
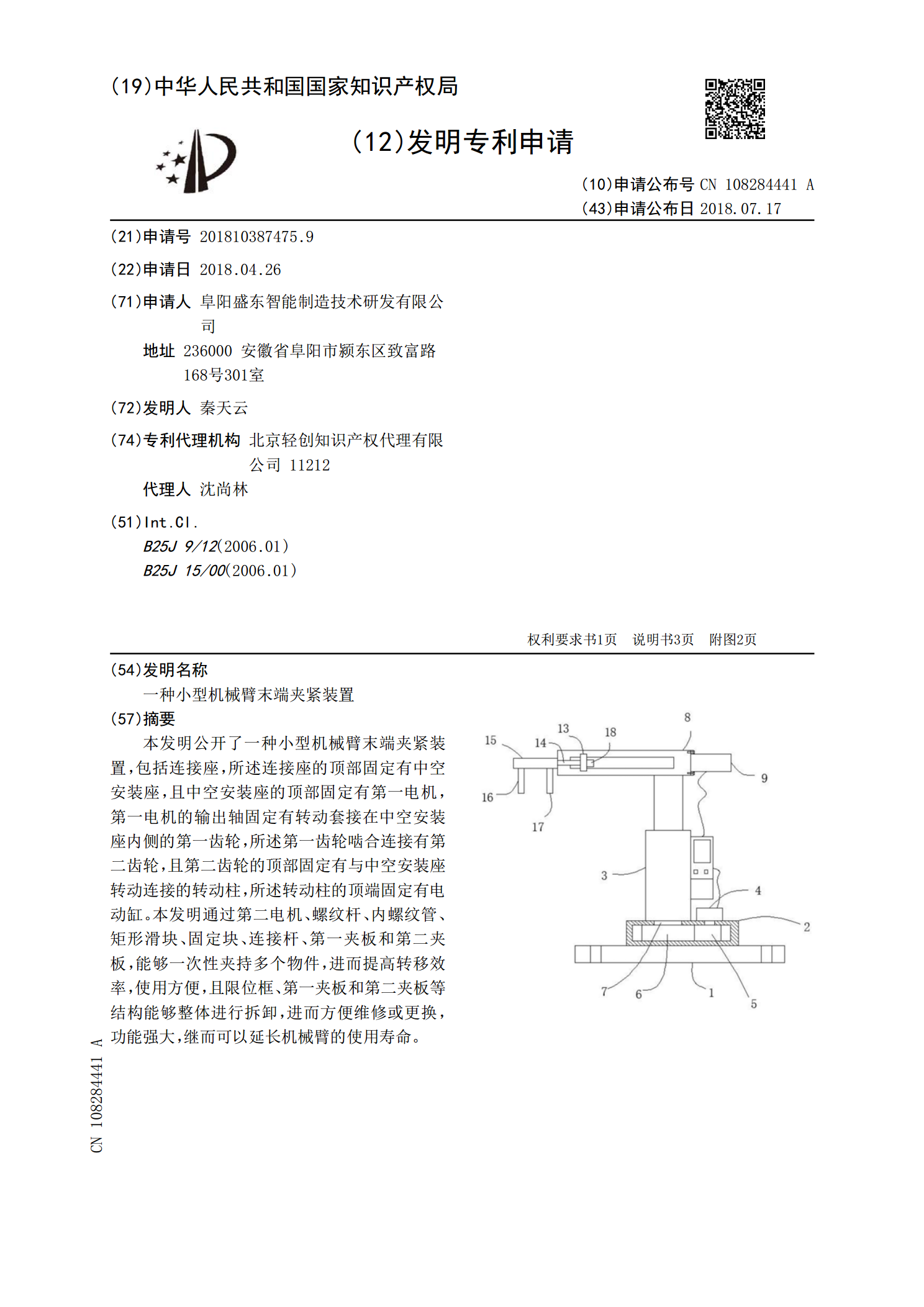
本发明公开了一种小型机械臂末端夹紧装置,包括连接座,所述连接座的顶部固定有中空安装座,且中空安装座的顶部固定有第一电机,第一电机的输出轴固定有转动套接在中空安装座内侧的第一齿轮,所述第一齿轮啮合连接有第二齿轮,且第二齿轮的顶部固定有与中空安装座转动连接的转动柱,所述转动柱的顶端固定有电动缸。本发明通过第二电机、螺纹杆、内螺纹管、矩形滑块、固定块、连接杆、第一夹板和第二夹板,能够一次性夹持多个物件,进而提高转移效率,使用方便,且限位框、第一夹板和第二夹板等结构能够整体进行拆卸,进而方便维修或更换,功能强大,
一种抓取用机械臂末端夹紧装置.pdf
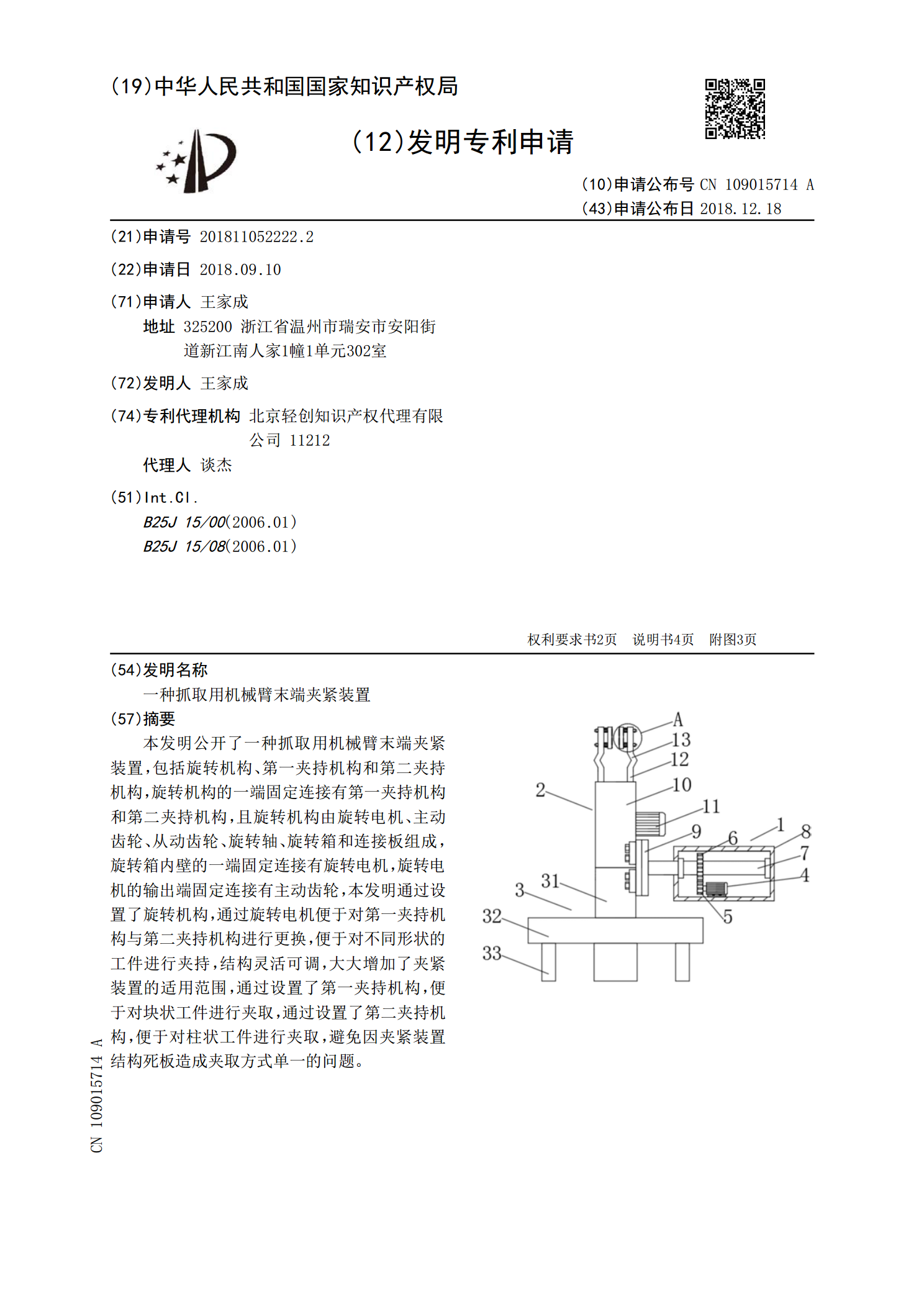
本发明公开了一种抓取用机械臂末端夹紧装置,包括旋转机构、第一夹持机构和第二夹持机构,旋转机构的一端固定连接有第一夹持机构和第二夹持机构,且旋转机构由旋转电机、主动齿轮、从动齿轮、旋转轴、旋转箱和连接板组成,旋转箱内壁的一端固定连接有旋转电机,旋转电机的输出端固定连接有主动齿轮,本发明通过设置了旋转机构,通过旋转电机便于对第一夹持机构与第二夹持机构进行更换,便于对不同形状的工件进行夹持,结构灵活可调,大大增加了夹紧装置的适用范围,通过设置了第一夹持机构,便于对块状工件进行夹取,通过设置了第二夹持机构,便于对

一种机械臂末端姿态调整方法及装置.pdf
本申请公开了一种机械臂末端姿态调整方法及装置,应用于智能机器人,所述智能机器人包括基座和机械臂,所述方法包括:在预先设定的情况下,获取所述机械臂末端在基座坐标系O

一种调整汽车摆臂位置的夹紧装置.pdf
本实用新型公开了一种调整汽车摆臂位置的夹紧装置,包括工作台,所述工作台的前侧设置有数量为两个的汽车摆臂主体,所述汽车摆臂主体包括上臂体和下臂体,所述上臂体的外表面设置有锥套总成,所述下臂体的外表面设置有衬套总成,所述上臂体和下臂体的连接处设置有球销总成,所述工作台的前侧固定安装有数量为两个的夹紧机构,所述夹紧机构包括基座、电动推杆、固定杆、支撑杆、移动套、连接杆、挡板、滑动套和夹持杆。通过工作台设有汽车摆臂主体,可以构成一个完整的夹紧装置,通过上臂体顶端设有锥套总成,当需要工作时,可以完整形成一个完整的加
一种汽车三角臂夹紧装置.pdf
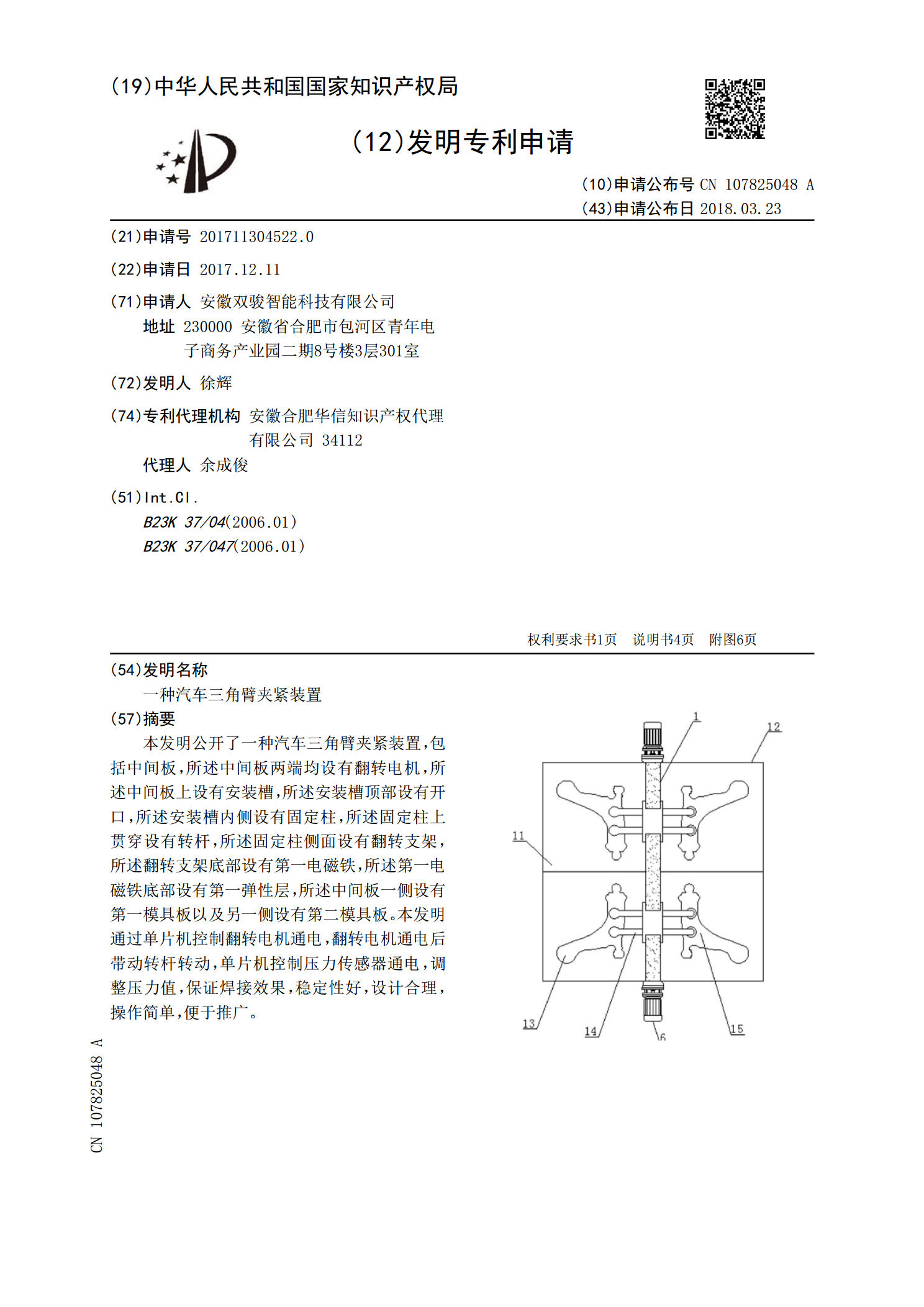
本发明公开了一种汽车三角臂夹紧装置,包括中间板,所述中间板两端均设有翻转电机,所述中间板上设有安装槽,所述安装槽顶部设有开口,所述安装槽内侧设有固定柱,所述固定柱上贯穿设有转杆,所述固定柱侧面设有翻转支架,所述翻转支架底部设有第一电磁铁,所述第一电磁铁底部设有第一弹性层,所述中间板一侧设有第一模具板以及另一侧设有第二模具板。本发明通过单片机控制翻转电机通电,翻转电机通电后带动转杆转动,单片机控制压力传感器通电,调整压力值,保证焊接效果,稳定性好,设计合理,操作简单,便于推广。