
带末端力控机械臂的延伸装置及具有其的机械臂.pdf

mm****酱吖


1/9

2/9

3/9

4/9

5/9
6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
带末端力控机械臂的延伸装置及具有其的机械臂.pdf
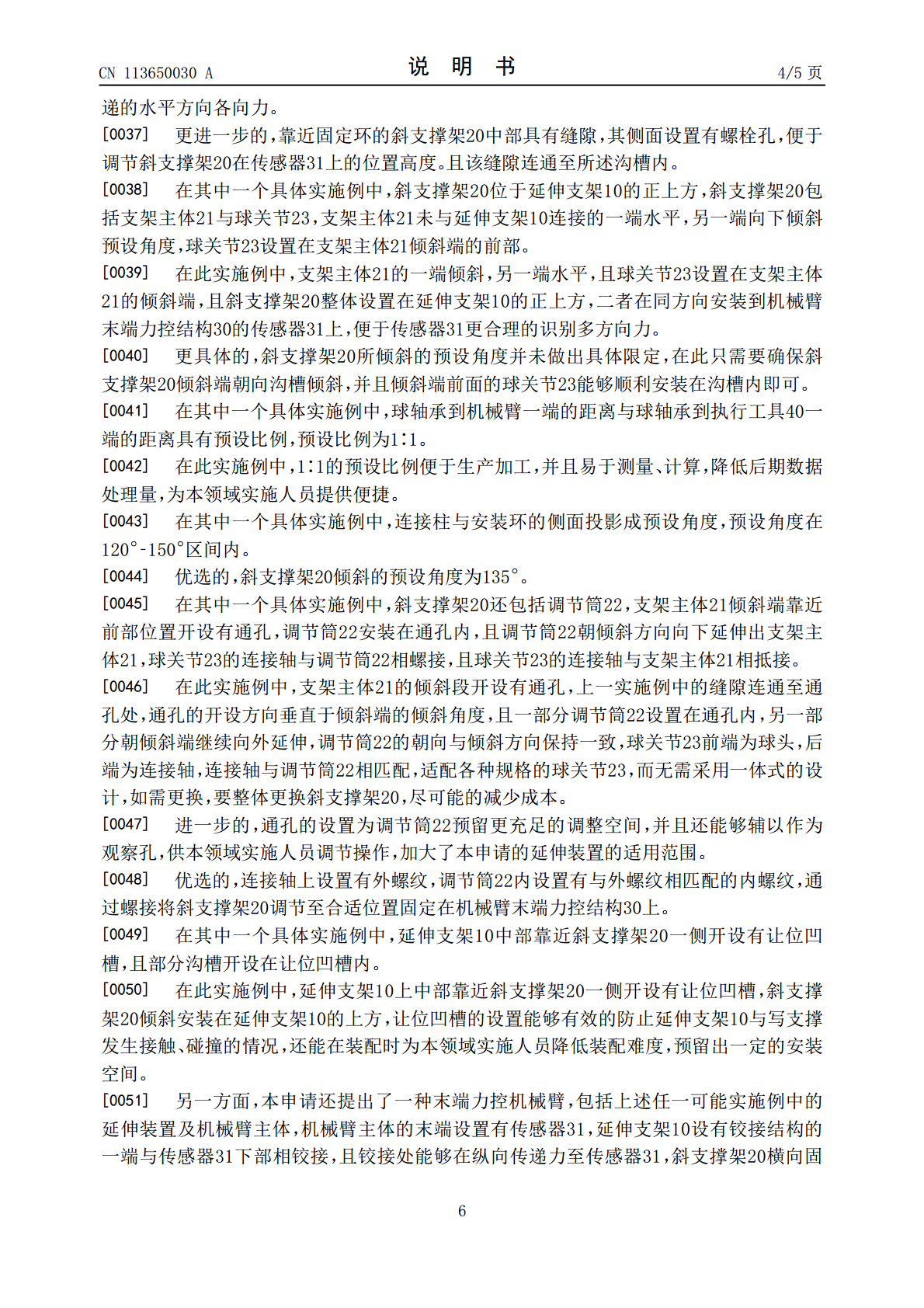
本申请涉及一种延伸装置,包括延伸支架及斜支撑架;延伸支架的一端与执行工具可拆卸连接,另一端与机械臂末端力控结构的末端连接,能够将执行工具竖直方向的力传递到机械臂;斜支撑架的一端与延伸支架的中部转动连接,另一端与机械臂末端力控结构从侧部固定连接,将执行工具水平方向的力传递到机械臂。延伸支架及斜支撑架的设置将执行工具所受扭矩等比例传递到机械臂末端的力控结构,并通过铰接处以及转动连接处能够将执行工具多向力进行拆分,纵向铰接将竖直方向力传递至传感器,斜支撑架横向固定在机械臂末端的力控结构,将水平方向力传递至传感器

具有架式延伸臂的机械手.pdf
本发明涉及一种架式延伸臂的机械手,包括支撑臂、抬腕机构、转腕机构和抓放机构;所述抬腕机构是在撑臂上铰接伸缩杆,伸缩杆的前端通过第一连杆接腕部基座;所述转腕机构是在腕部基座上固定有转腕控制电机,并通过主动齿轮与安装在腕部基座上的连轴齿轮相啮合;所述抓放机构是在连轴齿轮中固定有抓放控制电机,抓放控制电机与丝杠对接,在丝杠上接有螺母,在连轴齿轮上固定有连接盘,在连接盘上铰接有手指机构,第二连杆铰接在手指机构与螺母之间。本发明可在较大的空间范围内实现比较复杂的抓取动作,动作平稳、准确。
机械臂末端夹具.pdf
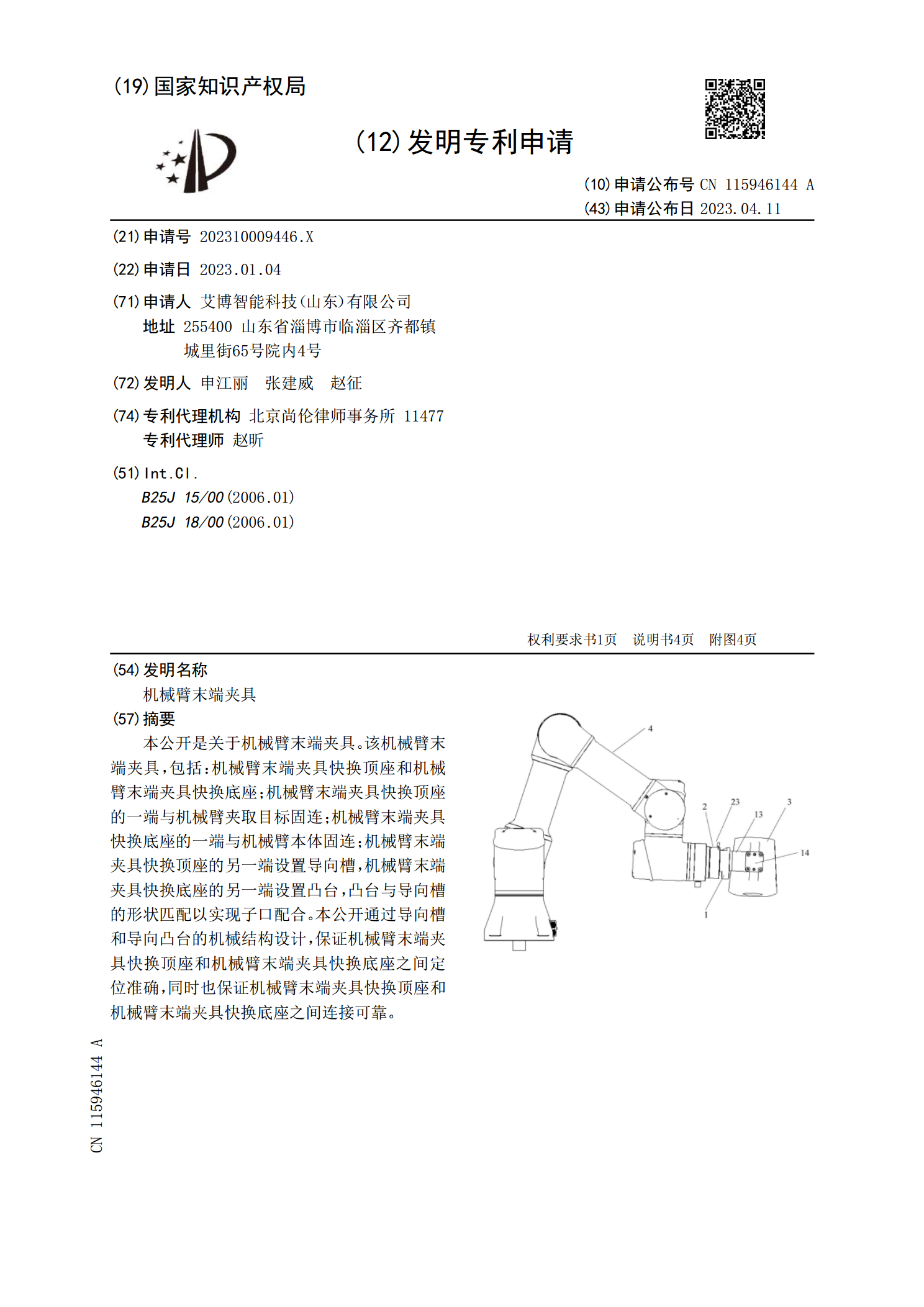
本公开是关于机械臂末端夹具。该机械臂末端夹具,包括:机械臂末端夹具快换顶座和机械臂末端夹具快换底座;机械臂末端夹具快换顶座的一端与机械臂夹取目标固连;机械臂末端夹具快换底座的一端与机械臂本体固连;机械臂末端夹具快换顶座的另一端设置导向槽,机械臂末端夹具快换底座的另一端设置凸台,凸台与导向槽的形状匹配以实现子口配合。本公开通过导向槽和导向凸台的机械结构设计,保证机械臂末端夹具快换顶座和机械臂末端夹具快换底座之间定位准确,同时也保证机械臂末端夹具快换顶座和机械臂末端夹具快换底座之间连接可靠。

末端关节臂、机械臂以及医疗台车.pdf
本发明涉及一种末端关节臂、机械臂以及医疗台车,末端关节臂包括第一关节臂区段和多个安装结构,第一关节臂区段具有第一中心轴线,多个安装结构,多个安装结构至少设置在第一关节臂区段上,第一关节臂区段上设置的多个安装结构围绕第一中心轴线周向分布,安装结构被配置为用于可拆卸安装操作器械,使多个安装结构上的多个操作器械沿着第一中心轴线的轴向保持相互平行,且沿着第一中心轴线的径向相互汇集。上述技术方案中,安装结构可以根据需要任意安装或拆卸操作器械,满足实际的手术需求,未安装有操作器械的安装结构可以作为预留的安装位置,节省
一种可转换的机械臂末端夹具及机械臂.pdf
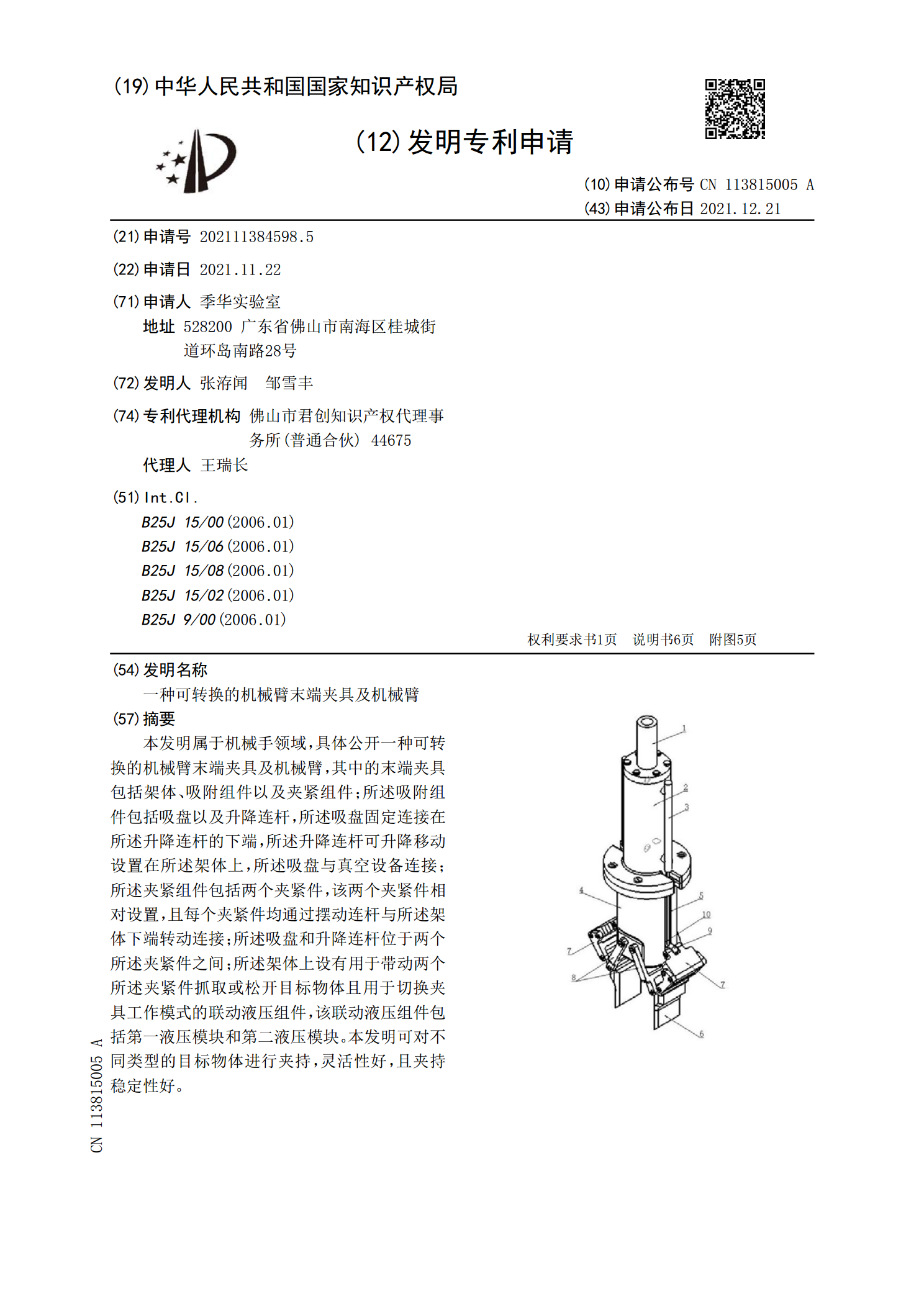
本发明属于机械手领域,具体公开一种可转换的机械臂末端夹具及机械臂,其中的末端夹具包括架体、吸附组件以及夹紧组件;所述吸附组件包括吸盘以及升降连杆,所述吸盘固定连接在所述升降连杆的下端,所述升降连杆可升降移动设置在所述架体上,所述吸盘与真空设备连接;所述夹紧组件包括两个夹紧件,该两个夹紧件相对设置,且每个夹紧件均通过摆动连杆与所述架体下端转动连接;所述吸盘和升降连杆位于两个所述夹紧件之间;所述架体上设有用于带动两个所述夹紧件抓取或松开目标物体且用于切换夹具工作模式的联动液压组件,该联动液压组件包括第一液压模