
辅助侧方位停车的装置.pdf

安双****文章

1/7
2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
辅助侧方位停车的装置.pdf
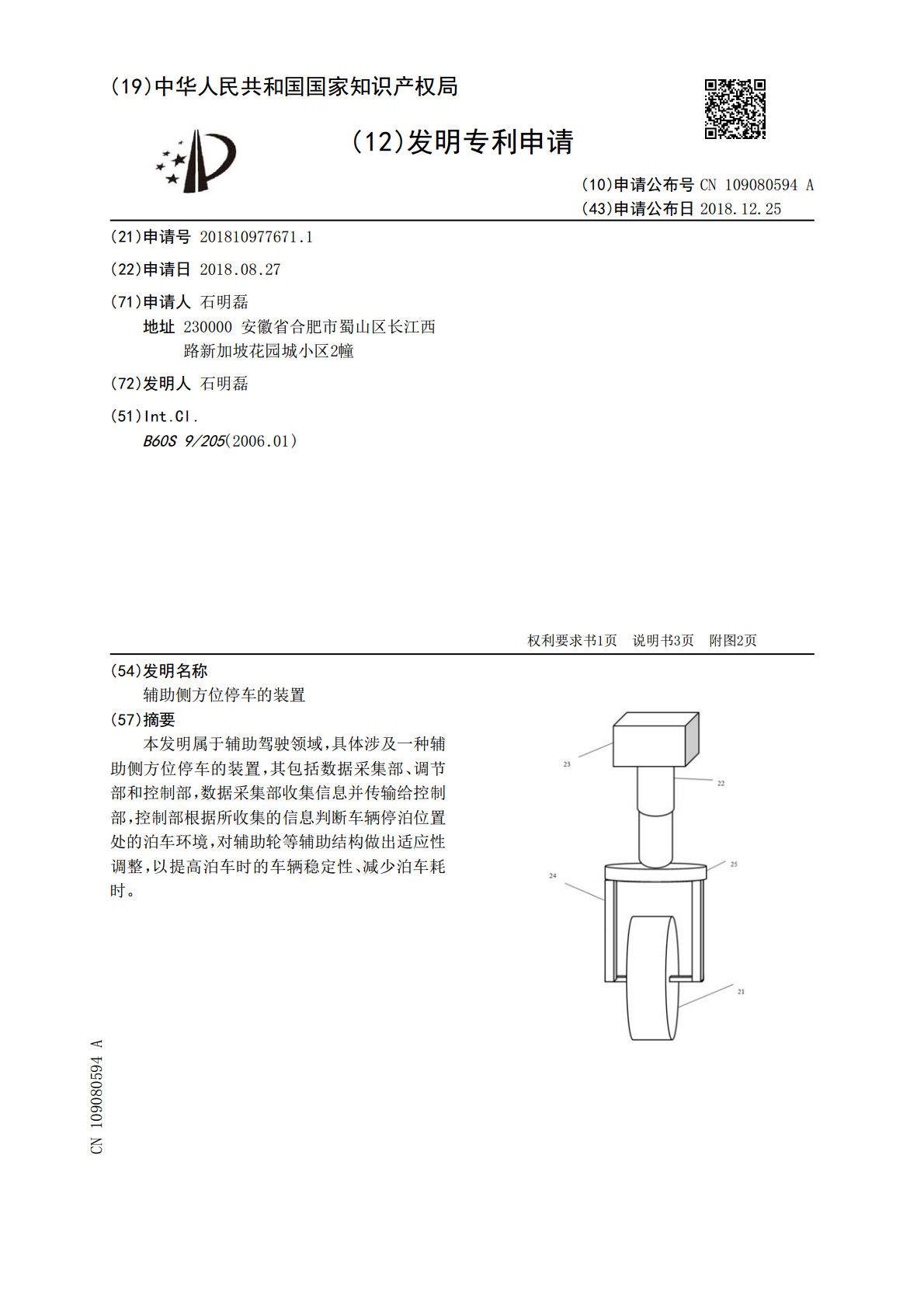
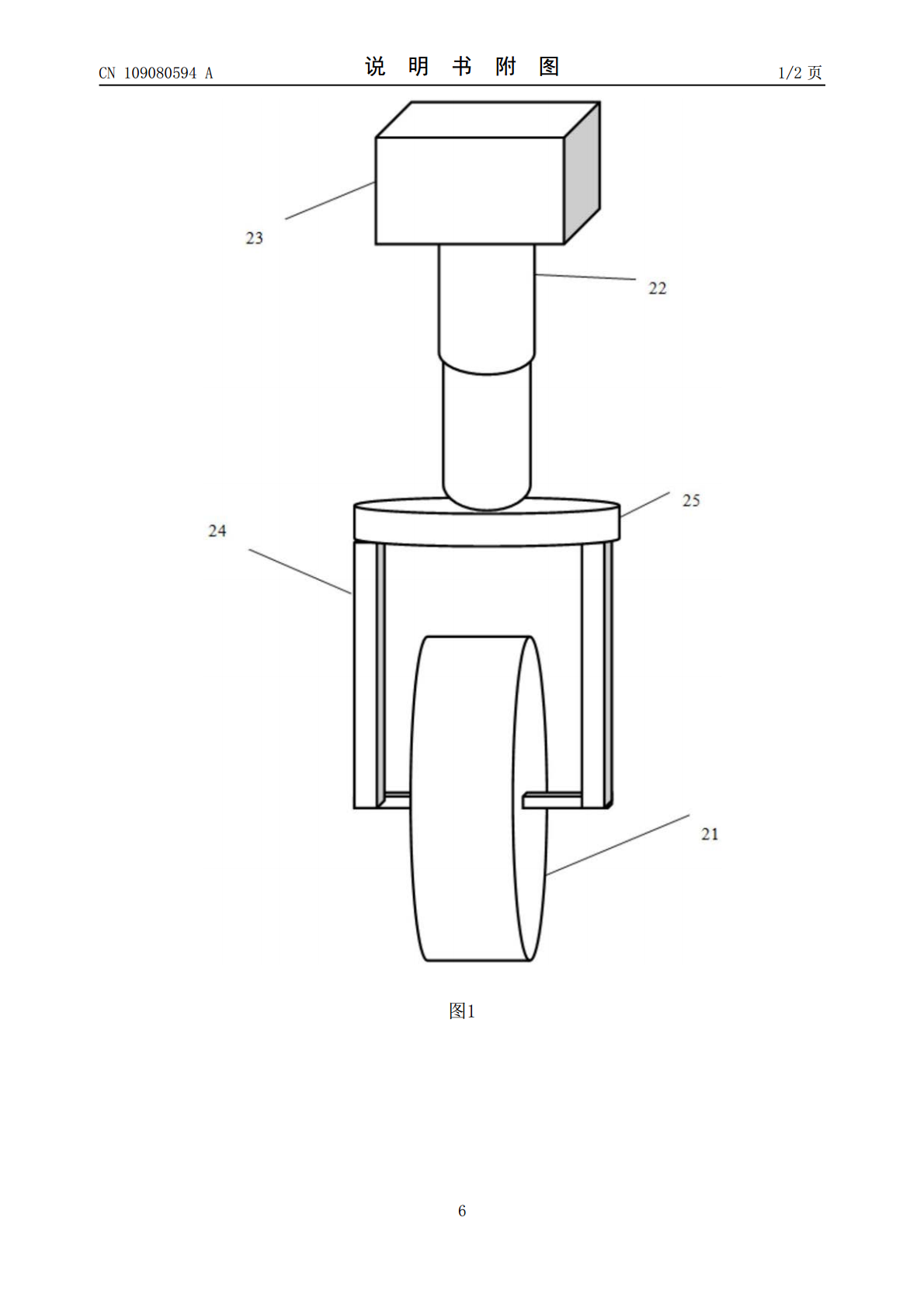
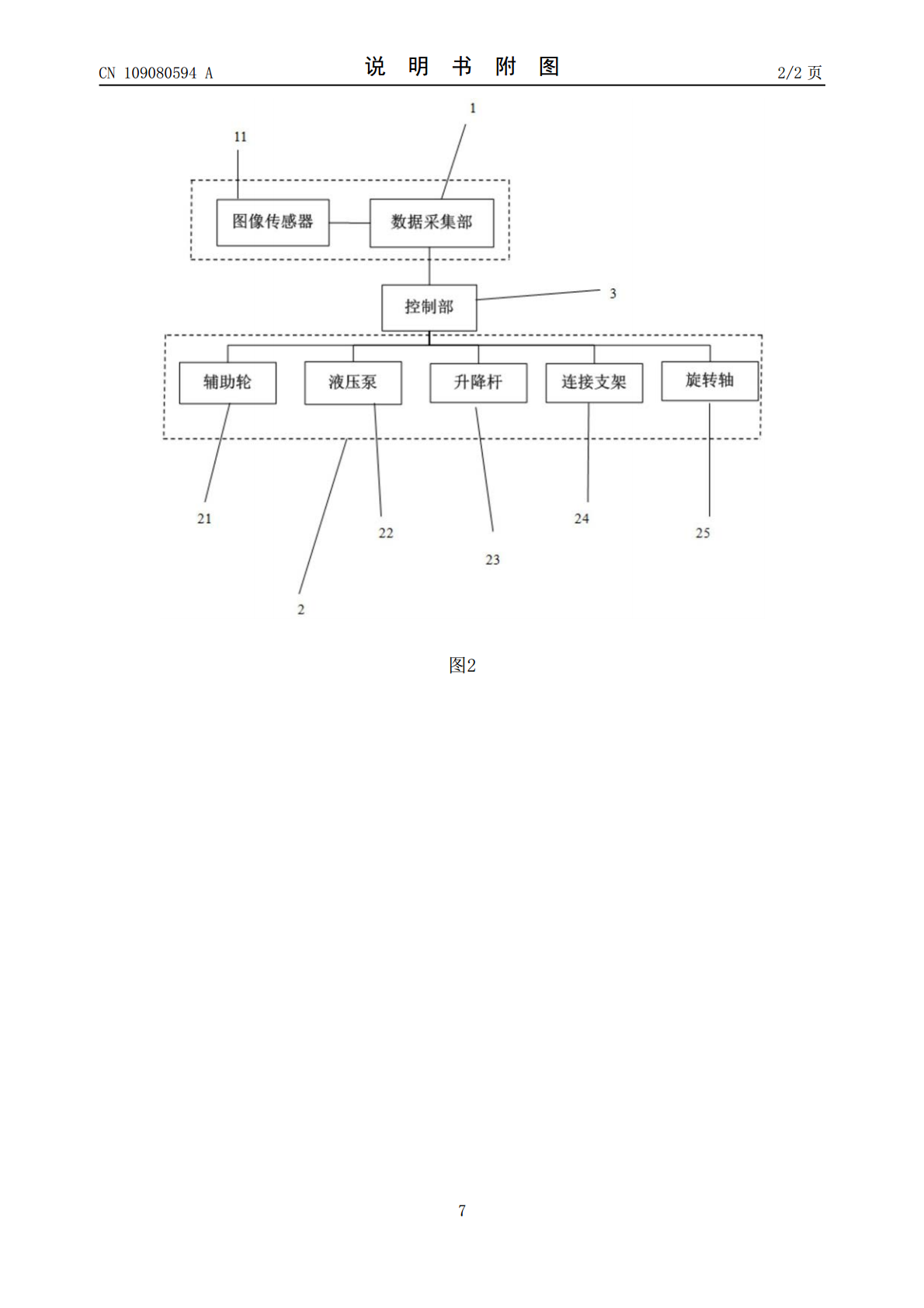
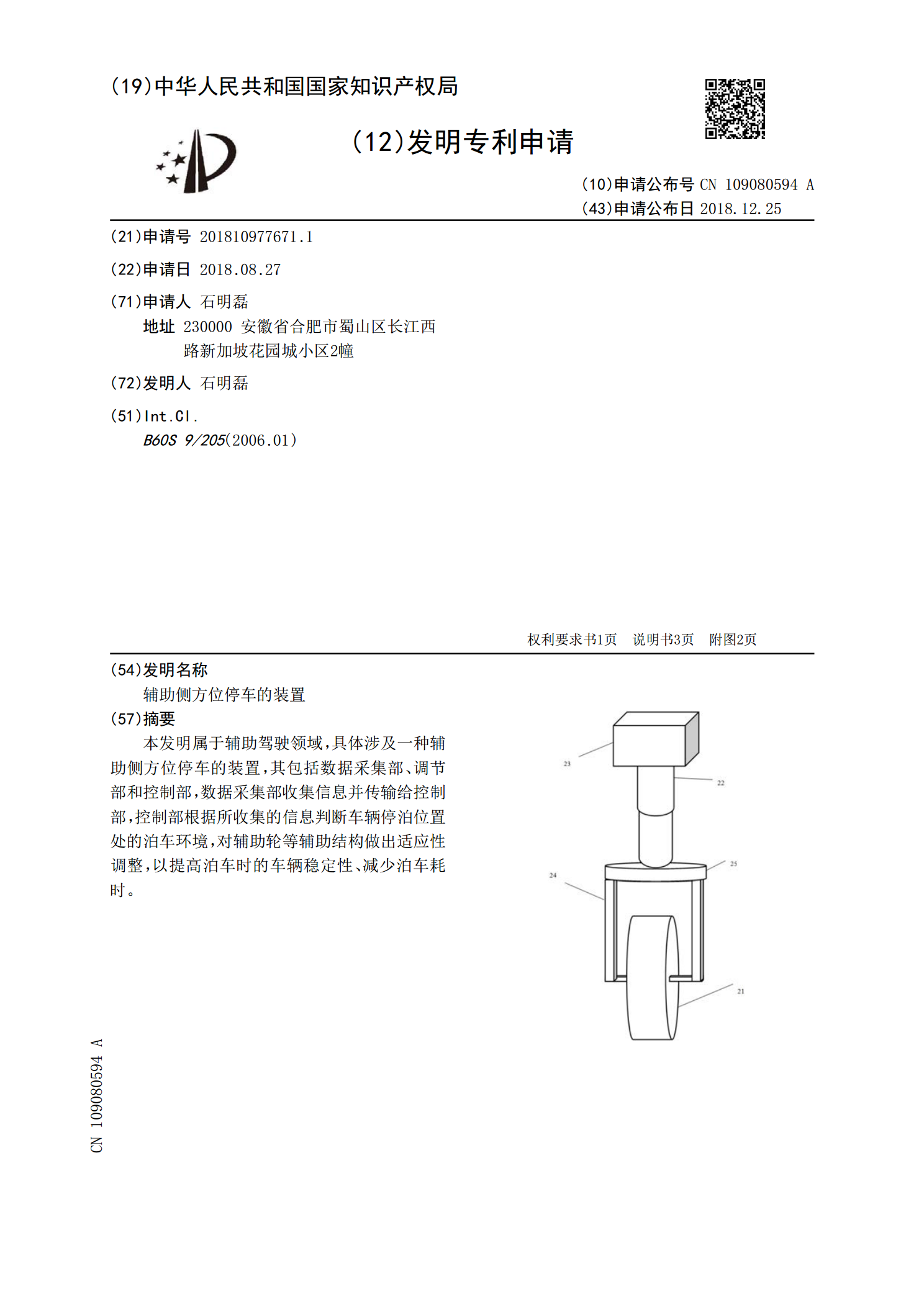
本发明属于辅助驾驶领域,具体涉及一种辅助侧方位停车的装置,其包括数据采集部、调节部和控制部,数据采集部收集信息并传输给控制部,控制部根据所收集的信息判断车辆停泊位置处的泊车环境,对辅助轮等辅助结构做出适应性调整,以提高泊车时的车辆稳定性、减少泊车耗时。

侧方位辅助停车装置及其停车方法.pdf
本发明涉及一种侧方位辅助停车装置及其停车方法,属于汽车领域。包括垂直于道路侧边的若干地槽,每个地槽内均设置链条,链条两端分别设置外链轮和内链轮,外链轮安装在地槽上,内链轮同轴固定在转轴上,转轴安装在地槽内,转轴端部同轴固定从动链轮,从动链轮与主动链轮传动连接,主动链轮同轴固定在电机转轴上,电机与控制系统连接。避免了视野盲区对停车的影响,停车准确到位,无需对车辆改动,无需驾驶员额外操作,停车简单方便,适合推广。
一种汽车全方位辅助停车装置.pdf
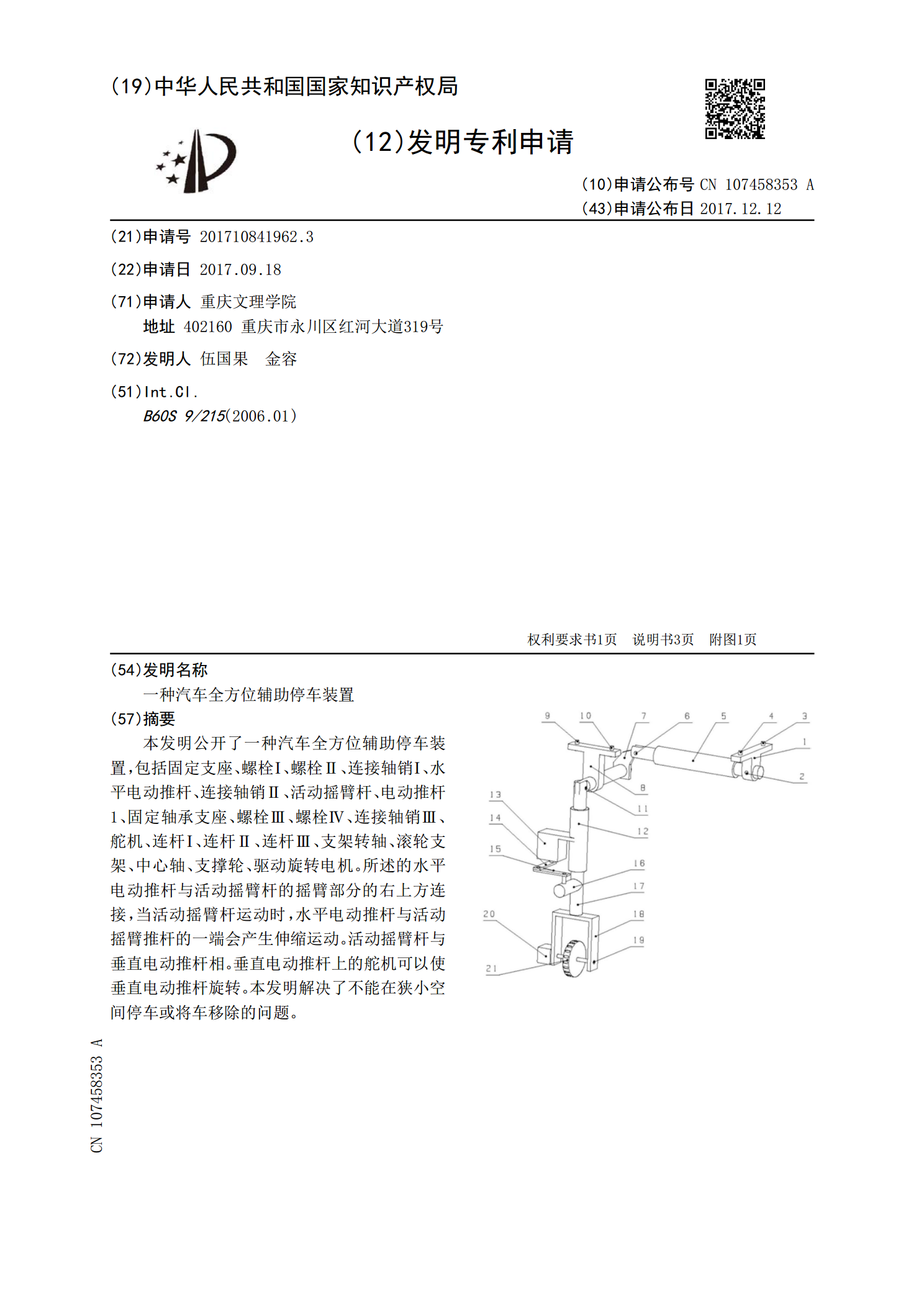
本发明公开了一种汽车全方位辅助停车装置,包括固定支座、螺栓Ⅰ、螺栓Ⅱ、连接轴销Ⅰ、水平电动推杆、连接轴销Ⅱ、活动摇臂杆、电动推杆1、固定轴承支座、螺栓Ⅲ、螺栓Ⅳ、连接轴销Ⅲ、舵机、连杆Ⅰ、连杆Ⅱ、连杆Ⅲ、支架转轴、滚轮支架、中心轴、支撑轮、驱动旋转电机。所述的水平电动推杆与活动摇臂杆的摇臂部分的右上方连接,当活动摇臂杆运动时,水平电动推杆与活动摇臂推杆的一端会产生伸缩运动。活动摇臂杆与垂直电动推杆相。垂直电动推杆上的舵机可以使垂直电动推杆旋转。本发明解决了不能在狭小空间停车或将车移除的问题。

停车辅助方法及停车辅助装置.pdf
在使用了停车辅助装置的停车辅助方法中,在以手动模式进行本车辆的停车的情况下,检测本车辆的停车执行状态,基于停车执行状态判定是否需要再次向目标停车位的停车,在判定为需要再次向目标停车位的停车的情况下,向用户界面输出将本车辆的停车模式从手动模式切换为自动模式的引导信息。
停车辅助装置及停车辅助方法.pdf
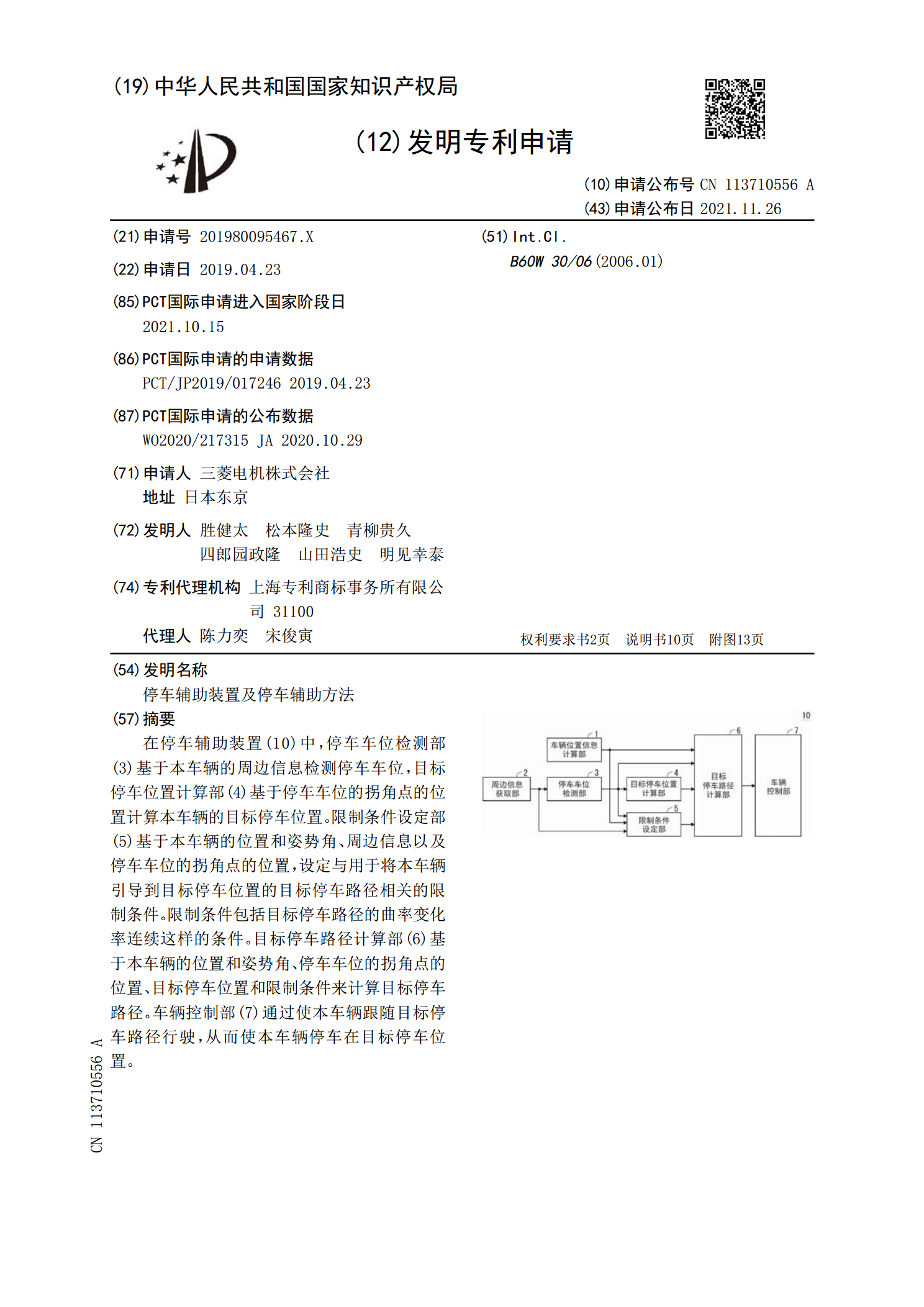
在停车辅助装置(10)中,停车车位检测部(3)基于本车辆的周边信息检测停车车位,目标停车位置计算部(4)基于停车车位的拐角点的位置计算本车辆的目标停车位置。限制条件设定部(5)基于本车辆的位置和姿势角、周边信息以及停车车位的拐角点的位置,设定与用于将本车辆引导到目标停车位置的目标停车路径相关的限制条件。限制条件包括目标停车路径的曲率变化率连续这样的条件。目标停车路径计算部(6)基于本车辆的位置和姿势角、停车车位的拐角点的位置、目标停车位置和限制条件来计算目标停车路径。车辆控制部(7)通过使本车辆跟随目标停