
停车辅助装置及停车辅助方法.pdf

猫巷****忠娟


1/10
2/10

3/10

4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

停车辅助方法及停车辅助装置.pdf
在使用了停车辅助装置的停车辅助方法中,停车辅助装置的控制器在本车辆通过驾驶员的手动驾驶而行驶的情况下,判定本车辆是否能够通过仅以后退移动而使本车辆停车的第一停车控制从当前位置停车到目标停车位,在判定为本车辆能够通过第一停车控制而停车到目标停车位的情况下,能够接受驾驶员对执行第一停车控制的选择。

停车辅助方法及停车辅助装置.pdf
在使用了停车辅助装置的停车辅助方法中,在以手动模式进行本车辆的停车的情况下,检测本车辆的停车执行状态,基于停车执行状态判定是否需要再次向目标停车位的停车,在判定为需要再次向目标停车位的停车的情况下,向用户界面输出将本车辆的停车模式从手动模式切换为自动模式的引导信息。
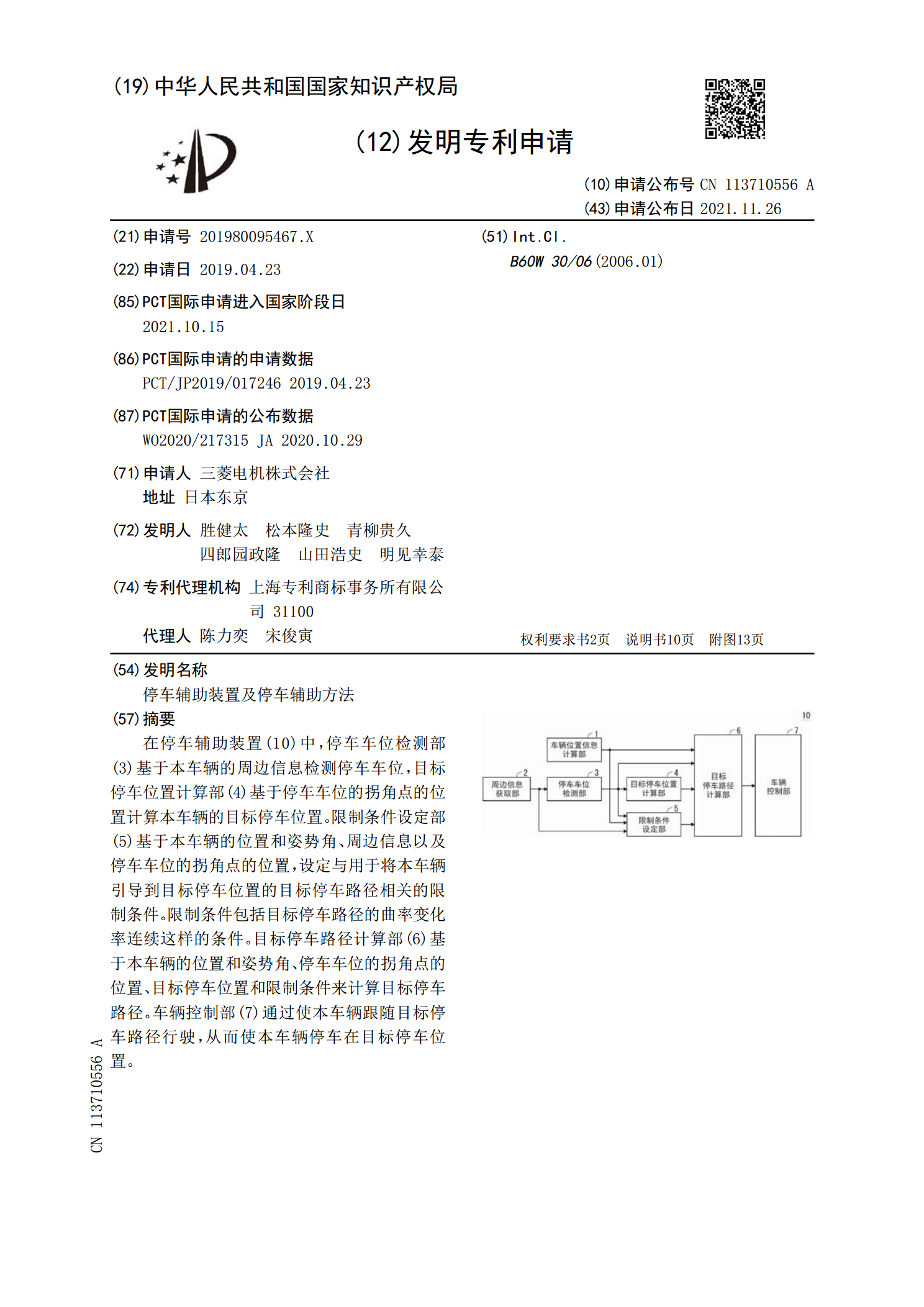
停车辅助装置及停车辅助方法.pdf
在停车辅助装置(10)中,停车车位检测部(3)基于本车辆的周边信息检测停车车位,目标停车位置计算部(4)基于停车车位的拐角点的位置计算本车辆的目标停车位置。限制条件设定部(5)基于本车辆的位置和姿势角、周边信息以及停车车位的拐角点的位置,设定与用于将本车辆引导到目标停车位置的目标停车路径相关的限制条件。限制条件包括目标停车路径的曲率变化率连续这样的条件。目标停车路径计算部(6)基于本车辆的位置和姿势角、停车车位的拐角点的位置、目标停车位置和限制条件来计算目标停车路径。车辆控制部(7)通过使本车辆跟随目标停

停车辅助装置、停车辅助方法以及停车辅助程序.pdf
本发明的一个方式的停车辅助装置具备负荷判定部(47A:S12、S14)、移动目的地设定部(47D:S19)、以及移动控制部(47E:S23~S26)。负荷判定部构成为,若接受使出库车辆出库的出库请求,则提取阻碍车辆,对于该阻碍车辆,判定表示在停车中用于出库车辆的移动所引起的负荷的大小的移动负荷。移动目的地设定部构成为,随着阻碍车辆的移动负荷变大,将作为不容易阻碍其他的出库车辆的移动的场所而预先设定的非阻碍位置设定为移动目的地。移动控制部构成为,使阻碍车辆移动到移动目的地,使出库车辆沿着引导路径移动。

停车辅助装置以及停车辅助方法.pdf
本发明涉及停车辅助装置以及停车辅助方法。在停车辅助用码(7)所表示的停车信息中包含障碍物信息和目标位置信息,该障碍物信息是与存在于停车场的障碍物有关的信息,该目标位置信息是与停车目标位置有关的信息。而且,在路径生成部(52)中如下那样创建停车路径:避开障碍物信息所表示的障碍物,并且将目标位置信息所表示的停车目标位置作为停车预定位置且从当前位置到停车预定位置。