
多驱万向车.pdf

骊蓉****23

1/8
2/8

3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

多驱万向车.pdf
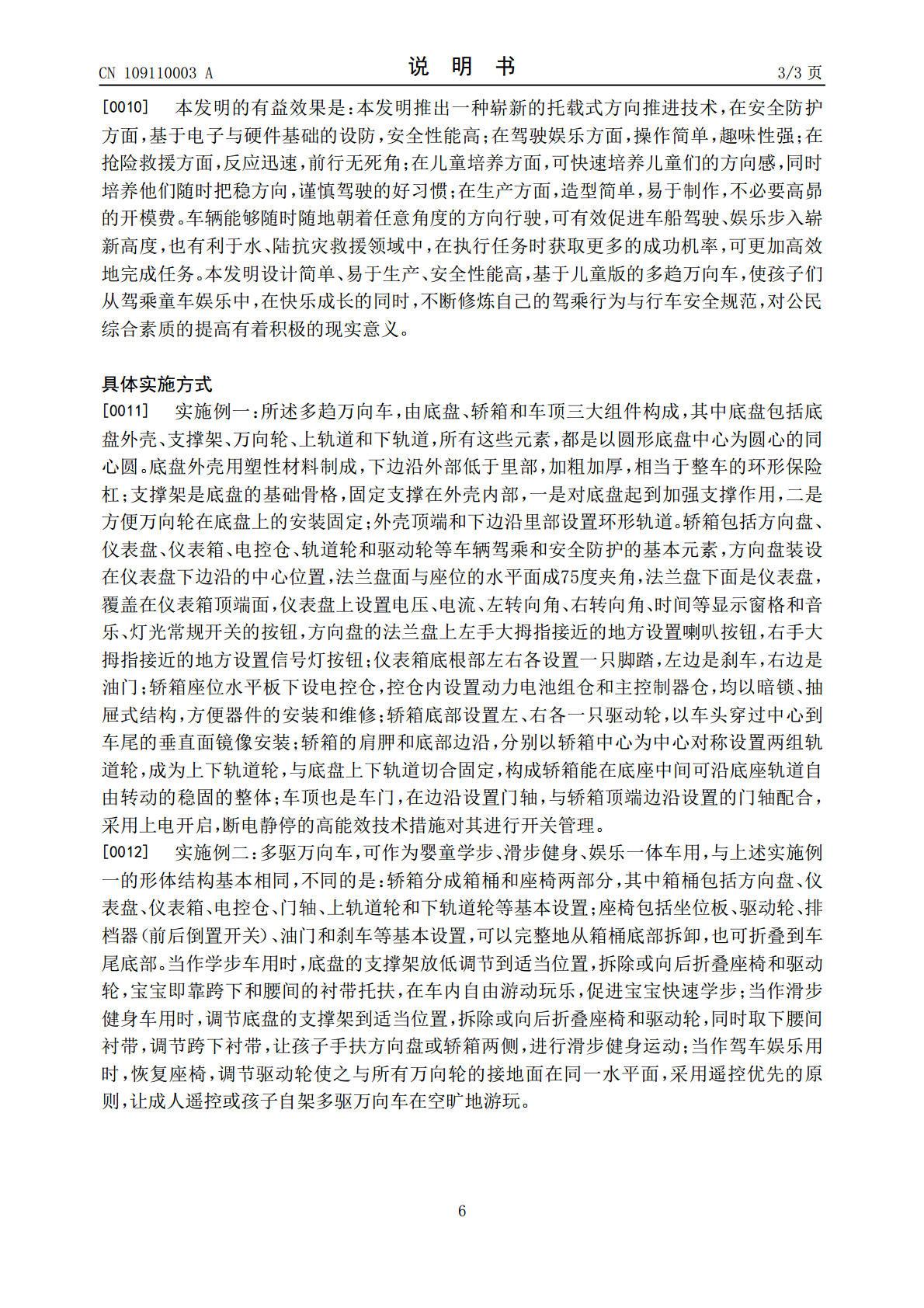
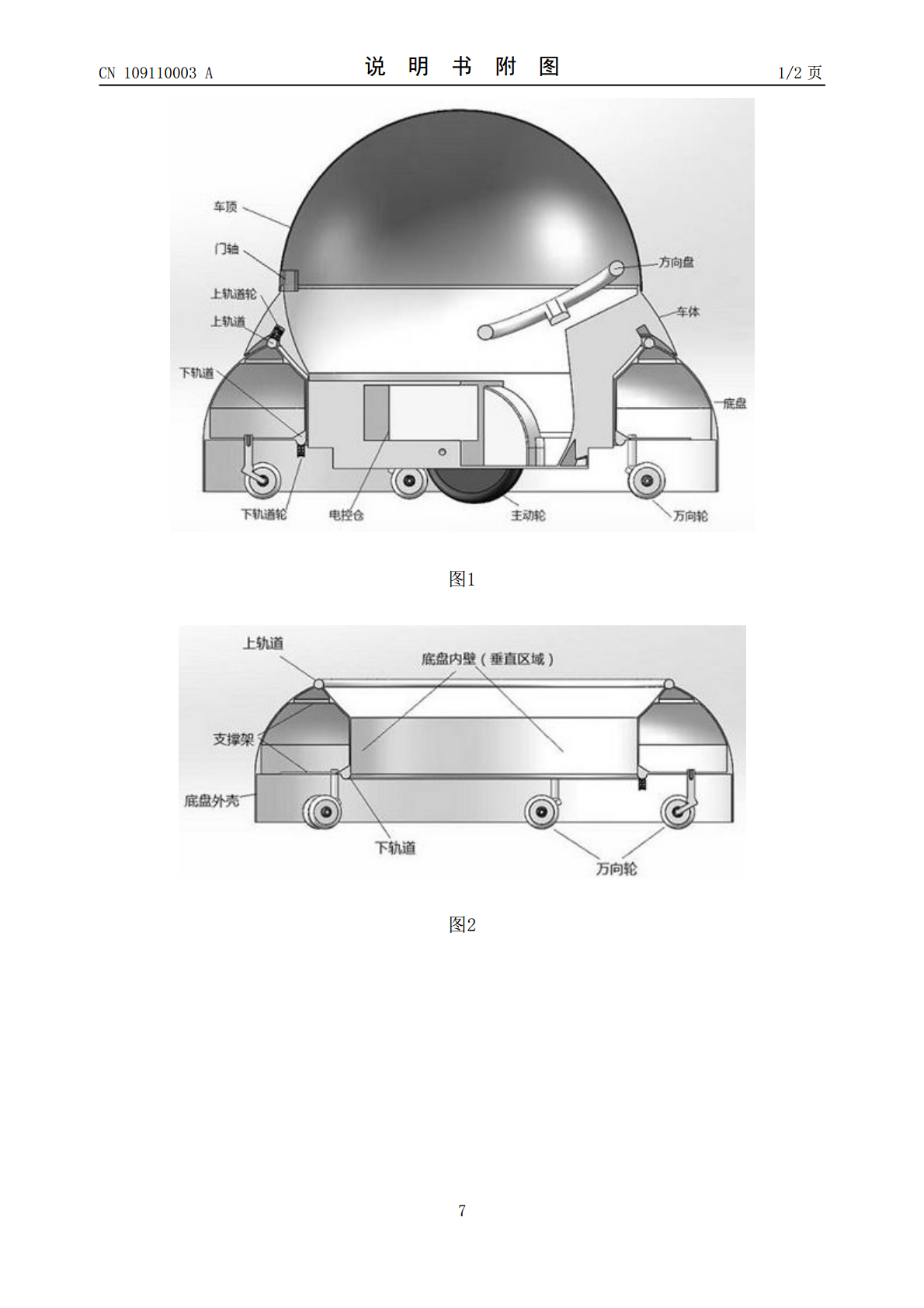
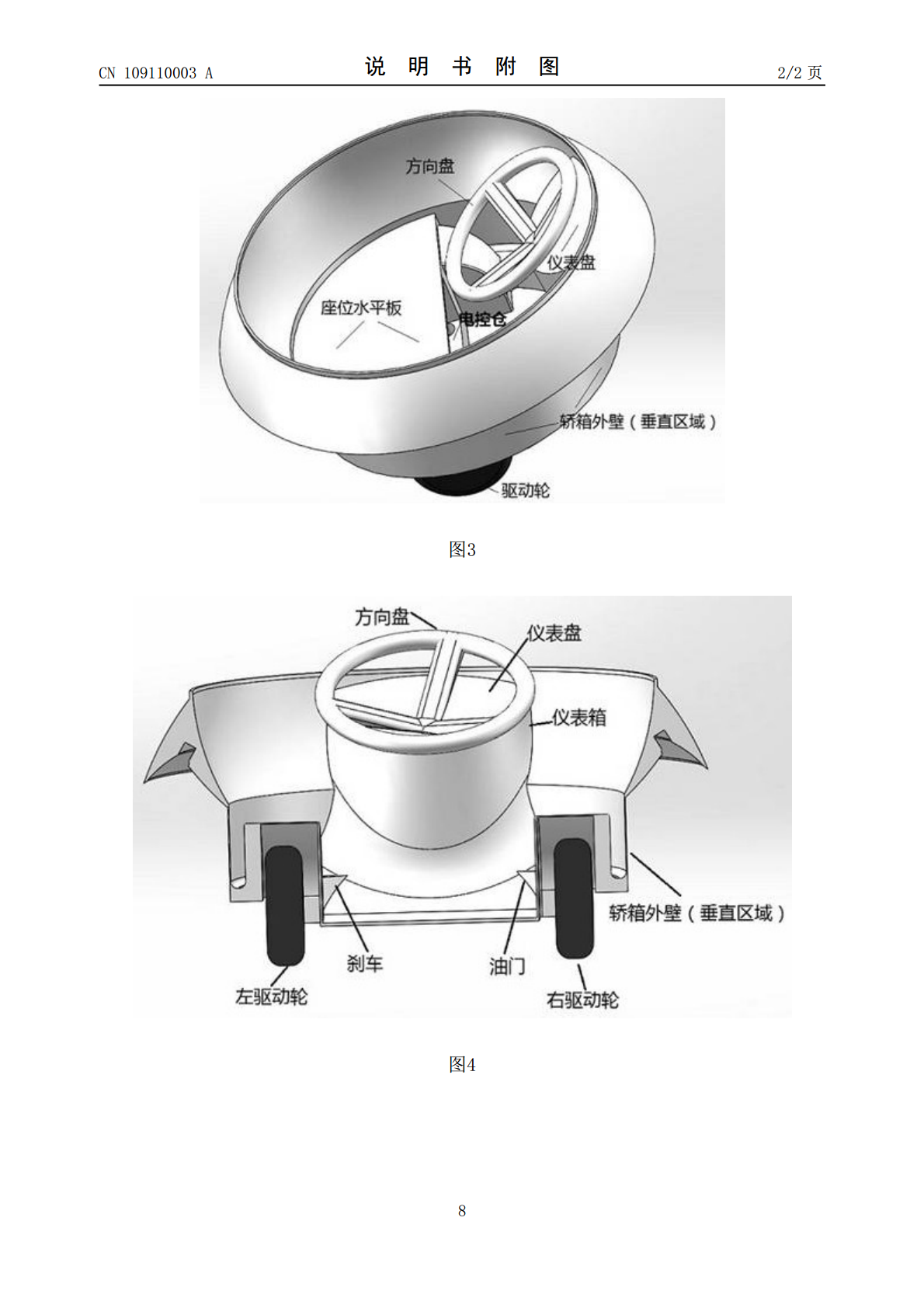
为了解决万向车在高速行驶时的方向稳定性,本发明提供一种多驱万向车,构成包括两只以上成组的驱动轮和轿箱组成的驱动系统、方向盘及其电子控制器件组成的转向控制系统、底盘和万向轮组成的车辆平衡和安全防护系统、脚踏和排档器其附设控制组件组成制动与加速系统等四大系统,整车结构分为底盘、轿箱、车顶三部分,车顶也是车门,通过与轿箱配合的门轴开合,底盘托载轿箱,随时随地被轿箱按既定方向推行,同时保障驱动轮无障碍行进推动、并由驾驶员随意轻松驾驶,随时随地就地朝任意方向行驶,且方向稳定,安全性能高,不易受路况干扰,适合包括儿童
电动中驱式万向搬运车.pdf
本发明涉及一种电动中驱式万向搬运车,包括车架及设置在车架内部的电控箱、蓄电池,车架的底部前后对称设置有驱动导向装置,驱动导向装置具有对称设置在车架底部的导向轮,导向轮之间居中设置有驱动轮,驱动轮与导向轮均由转向传动机构驱动同步转动,驱动轮通过行走驱动机构驱动;本发明中的搬运车具有行走灵活、方便的优点,可以在厂房内部狭小的空间内完成转弯、掉头等动作,场地适应能力强,满足多种运输需求;由于本搬运车移动灵活,在运输前,可以更接近需要搬运的重型设备,缩短搬运距离,提升搬运效率;车架高度较低,可减少对重物的搬运高度
一种多驱重型运输车.pdf
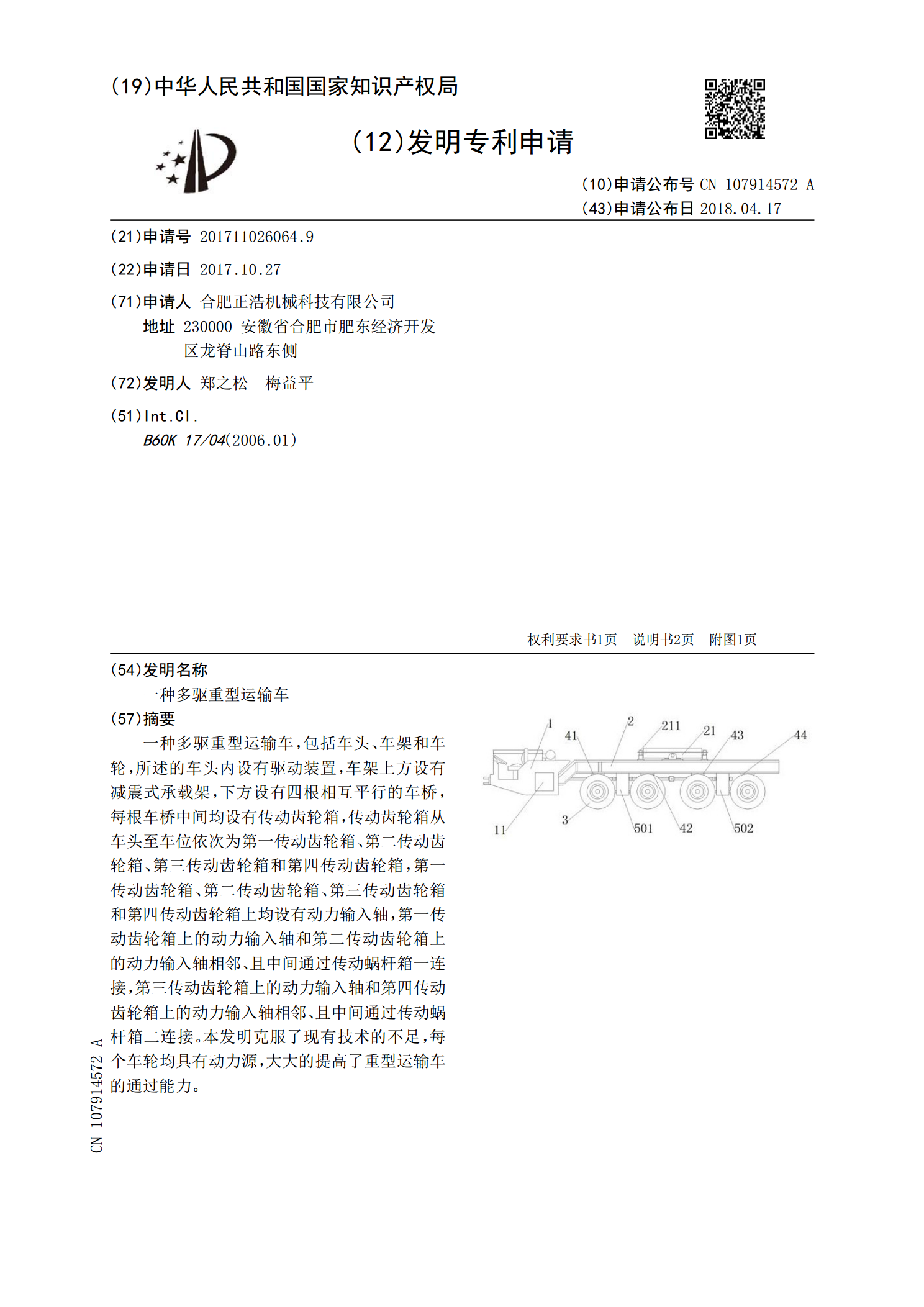
一种多驱重型运输车,包括车头、车架和车轮,所述的车头内设有驱动装置,车架上方设有减震式承载架,下方设有四根相互平行的车桥,每根车桥中间均设有传动齿轮箱,传动齿轮箱从车头至车位依次为第一传动齿轮箱、第二传动齿轮箱、第三传动齿轮箱和第四传动齿轮箱,第一传动齿轮箱、第二传动齿轮箱、第三传动齿轮箱和第四传动齿轮箱上均设有动力输入轴,第一传动齿轮箱上的动力输入轴和第二传动齿轮箱上的动力输入轴相邻、且中间通过传动蜗杆箱一连接,第三传动齿轮箱上的动力输入轴和第四传动齿轮箱上的动力输入轴相邻、且中间通过传动蜗杆箱二连接。
万向车.pdf
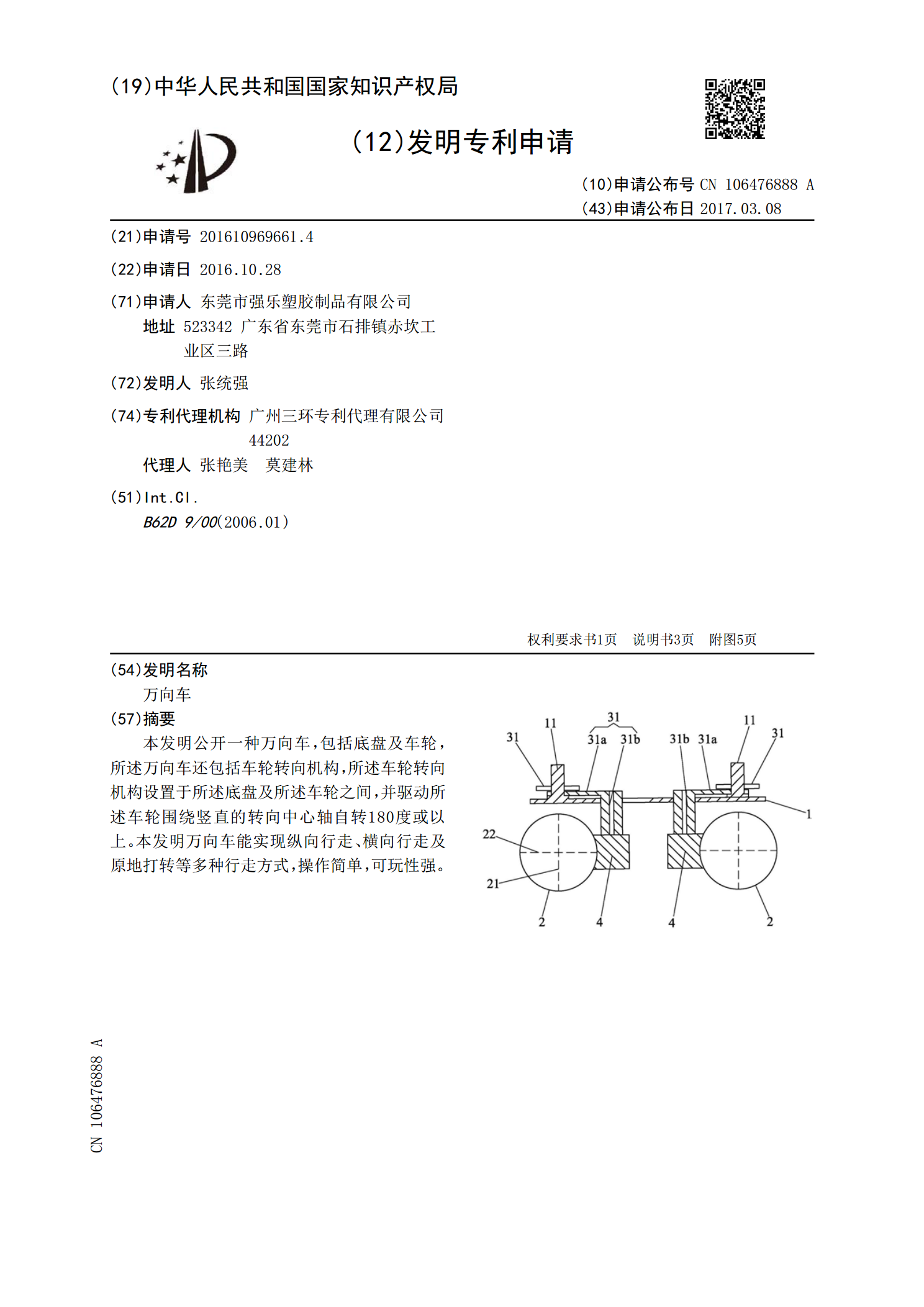
本发明公开一种万向车,包括底盘及车轮,所述万向车还包括车轮转向机构,所述车轮转向机构设置于所述底盘及所述车轮之间,并驱动所述车轮围绕竖直的转向中心轴自转180度或以上。本发明万向车能实现纵向行走、横向行走及原地打转等多种行走方式,操作简单,可玩性强。
万向车.pdf
本发明提供一种万向车,包括驱动轮、从动轮、底盘、轿箱、方向盘、减震、保险杠、车门等一般车辆都具备的设施部件外,还具备格外的方向引导轮和齿圈等全新理念的方向引导配置,驾驶员转动方盘,方向引导轮在圆形底盘的齿圈上滚动,带动整个轿箱在底盘上转动,驱动轮也随同轿箱一起改变方向,这样,车辆可随时随地旋转任意角度的方向行驶,可就地回转头行驶,且车的行驶方向始终是驾驶员的正前方,即方向盘所在的方向。在驾驶娱乐方面,操作简单,趣味性强,安全性高;在抢险救援方面,反应迅速,运行无死角;在儿童培养方面,可快速培养儿童们的方向