
一种石墨舟移载AGV小车.pdf

猫巷****正德

1/9
2/9
3/9
4/9
5/9
6/9

7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种石墨舟移载AGV小车.pdf
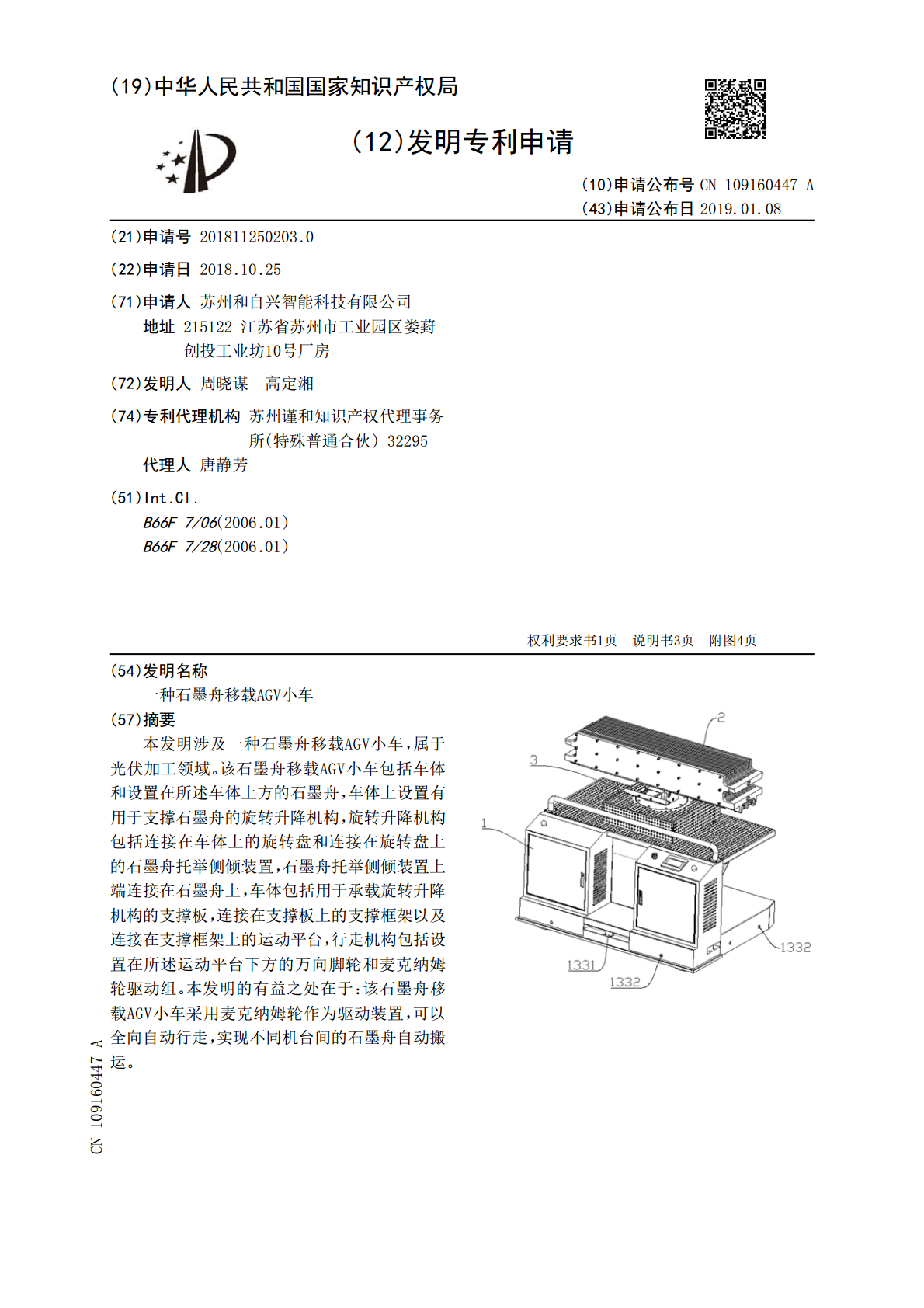
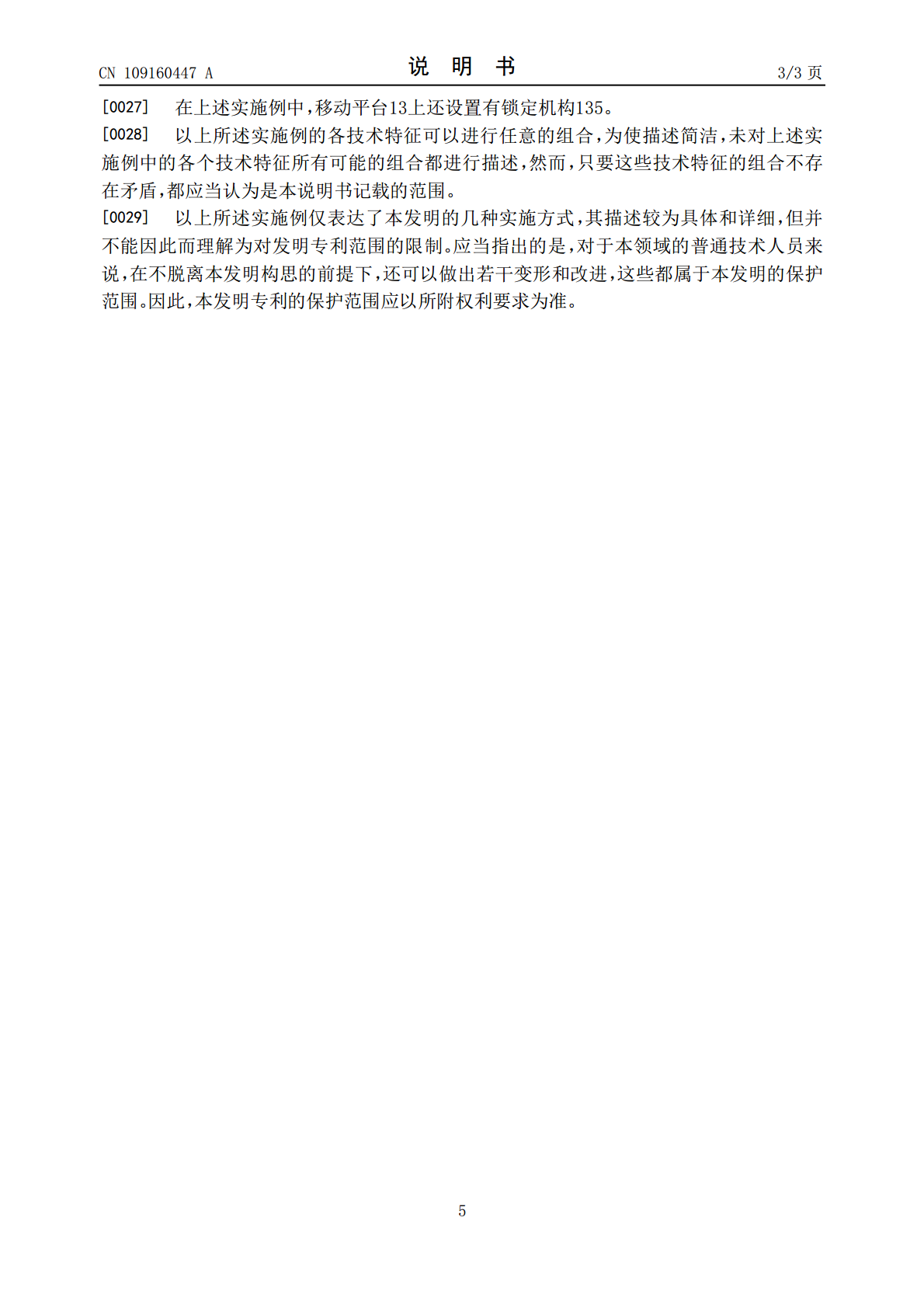
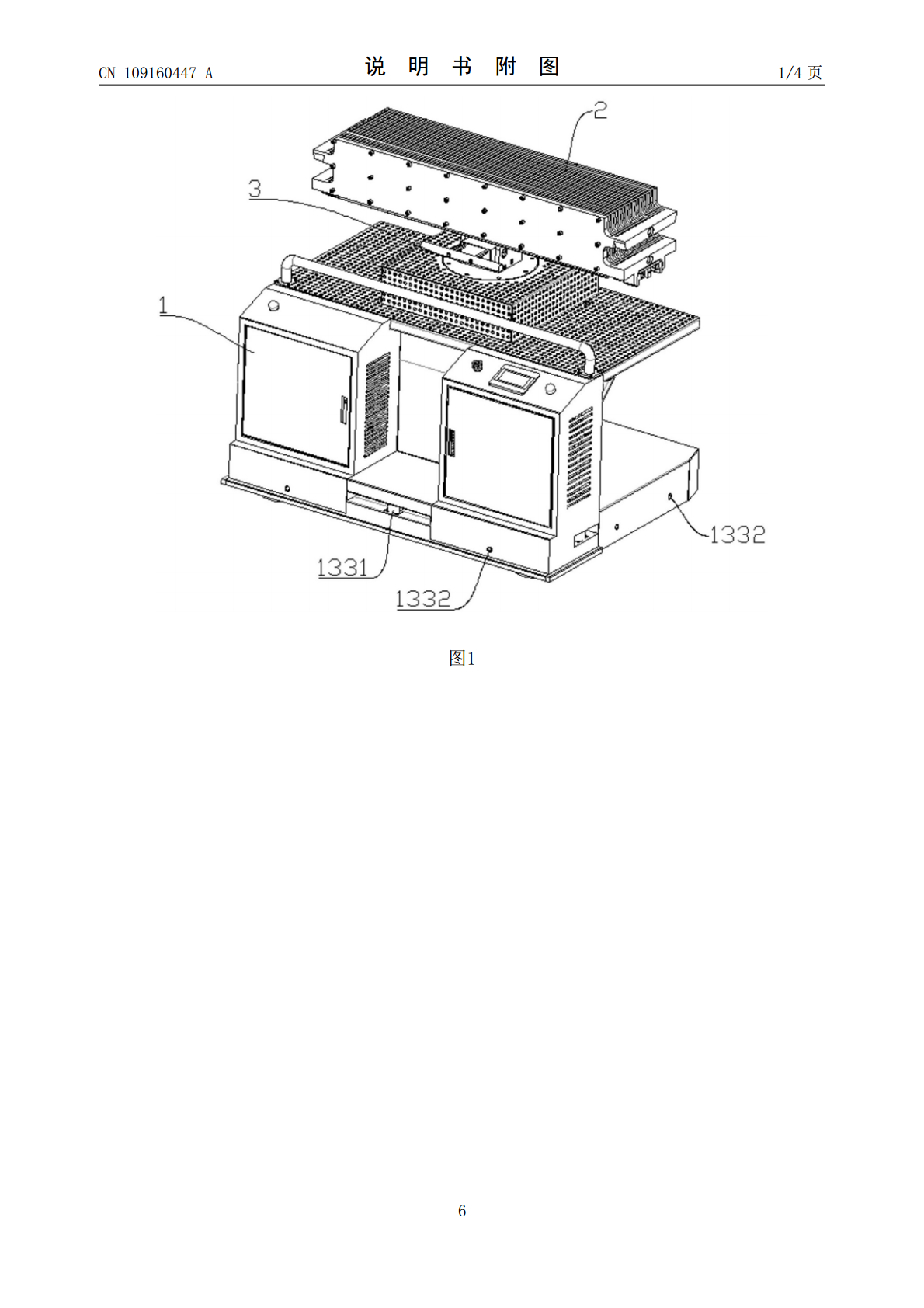
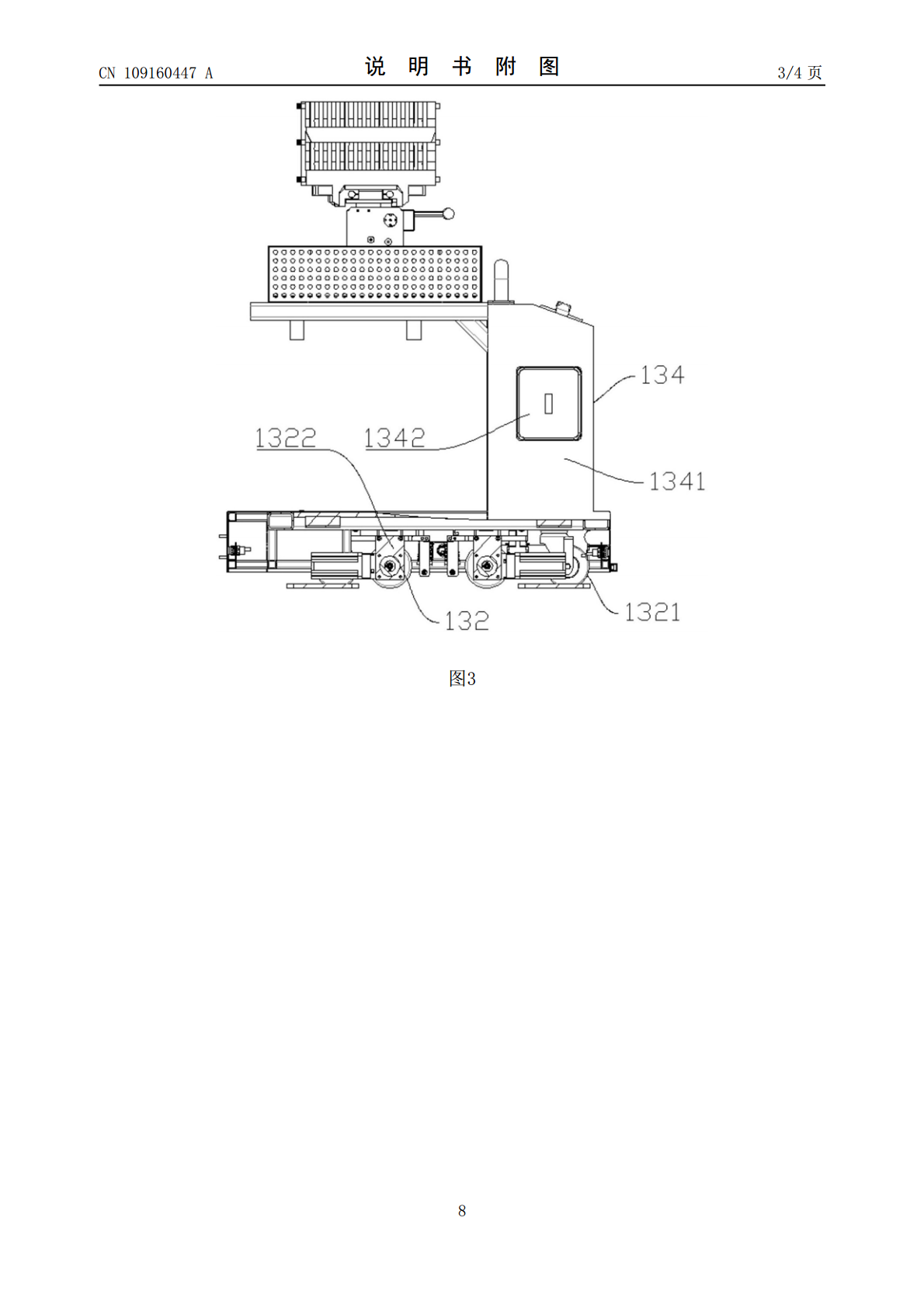
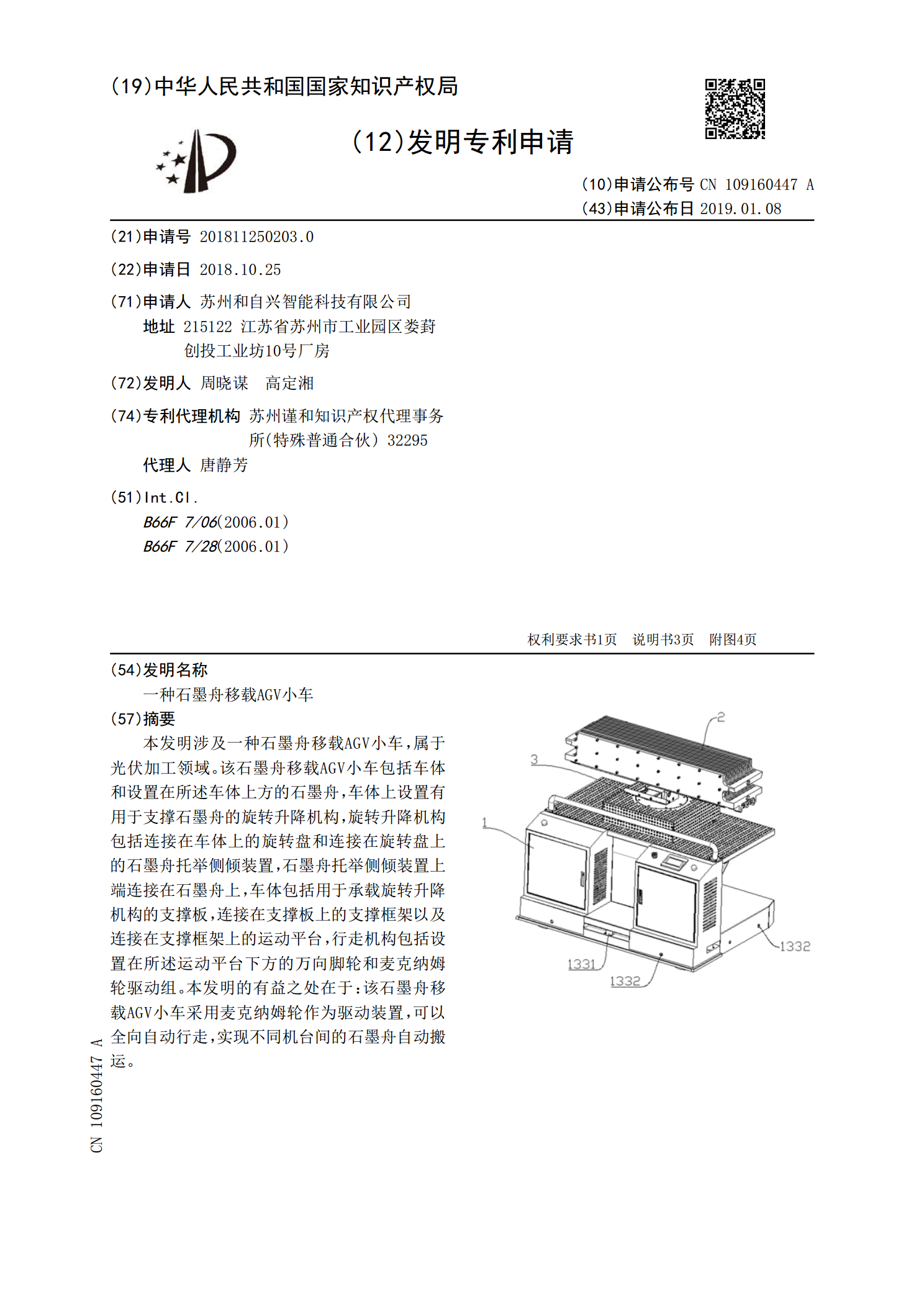
本发明涉及一种石墨舟移载AGV小车,属于光伏加工领域。该石墨舟移载AGV小车包括车体和设置在所述车体上方的石墨舟,车体上设置有用于支撑石墨舟的旋转升降机构,旋转升降机构包括连接在车体上的旋转盘和连接在旋转盘上的石墨舟托举侧倾装置,石墨舟托举侧倾装置上端连接在石墨舟上,车体包括用于承载旋转升降机构的支撑板,连接在支撑板上的支撑框架以及连接在支撑框架上的运动平台,行走机构包括设置在所述运动平台下方的万向脚轮和麦克纳姆轮驱动组。本发明的有益之处在于:该石墨舟移载AGV小车采用麦克纳姆轮作为驱动装置,可以全向自动
一种柔性双向移载小车装置.pdf
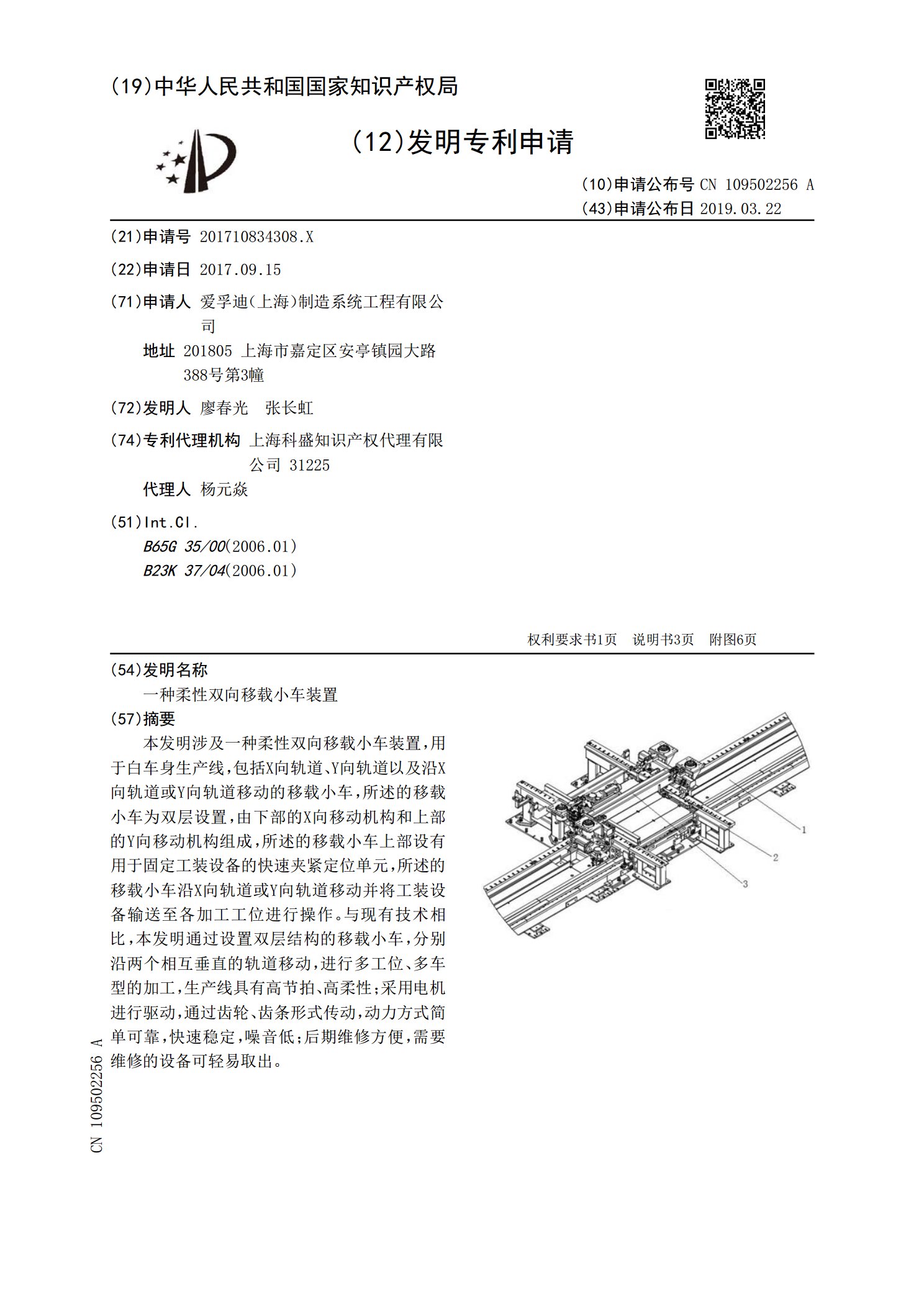
本发明涉及一种柔性双向移载小车装置,用于白车身生产线,包括X向轨道、Y向轨道以及沿X向轨道或Y向轨道移动的移载小车,所述的移载小车为双层设置,由下部的X向移动机构和上部的Y向移动机构组成,所述的移载小车上部设有用于固定工装设备的快速夹紧定位单元,所述的移载小车沿X向轨道或Y向轨道移动并将工装设备输送至各加工工位进行操作。与现有技术相比,本发明通过设置双层结构的移载小车,分别沿两个相互垂直的轨道移动,进行多工位、多车型的加工,生产线具有高节拍、高柔性;采用电机进行驱动,通过齿轮、齿条形式传动,动力方式简单可
一种自动移载悬臂轴式AGV系统.pdf
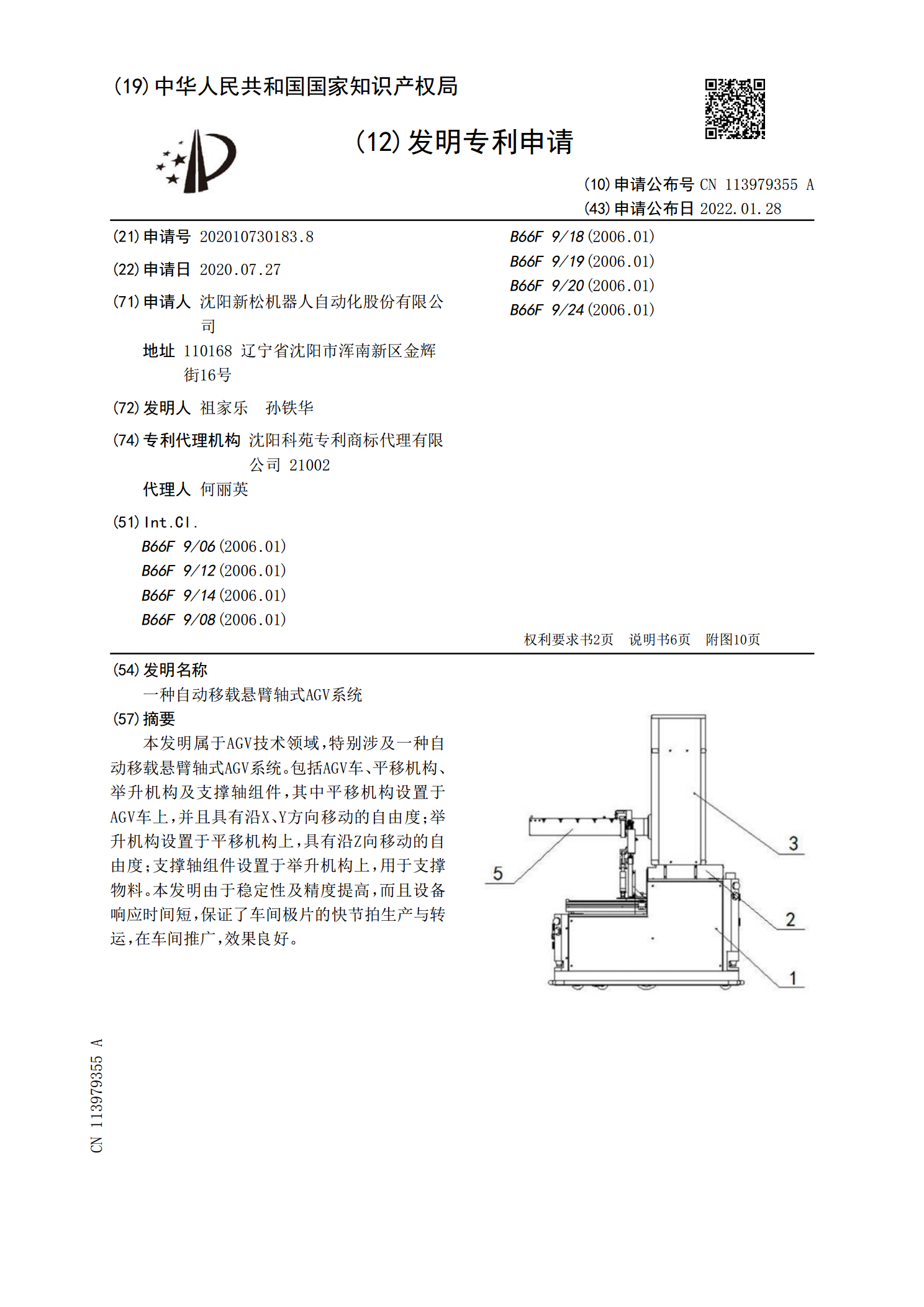
本发明属于AGV技术领域,特别涉及一种自动移载悬臂轴式AGV系统。包括AGV车、平移机构、举升机构及支撑轴组件,其中平移机构设置于AGV车上,并且具有沿X、Y方向移动的自由度;举升机构设置于平移机构上,具有沿Z向移动的自由度;支撑轴组件设置于举升机构上,用于支撑物料。本发明由于稳定性及精度提高,而且设备响应时间短,保证了车间极片的快节拍生产与转运,在车间推广,效果良好。
一种AGV小车换向结构及AGV小车.pdf
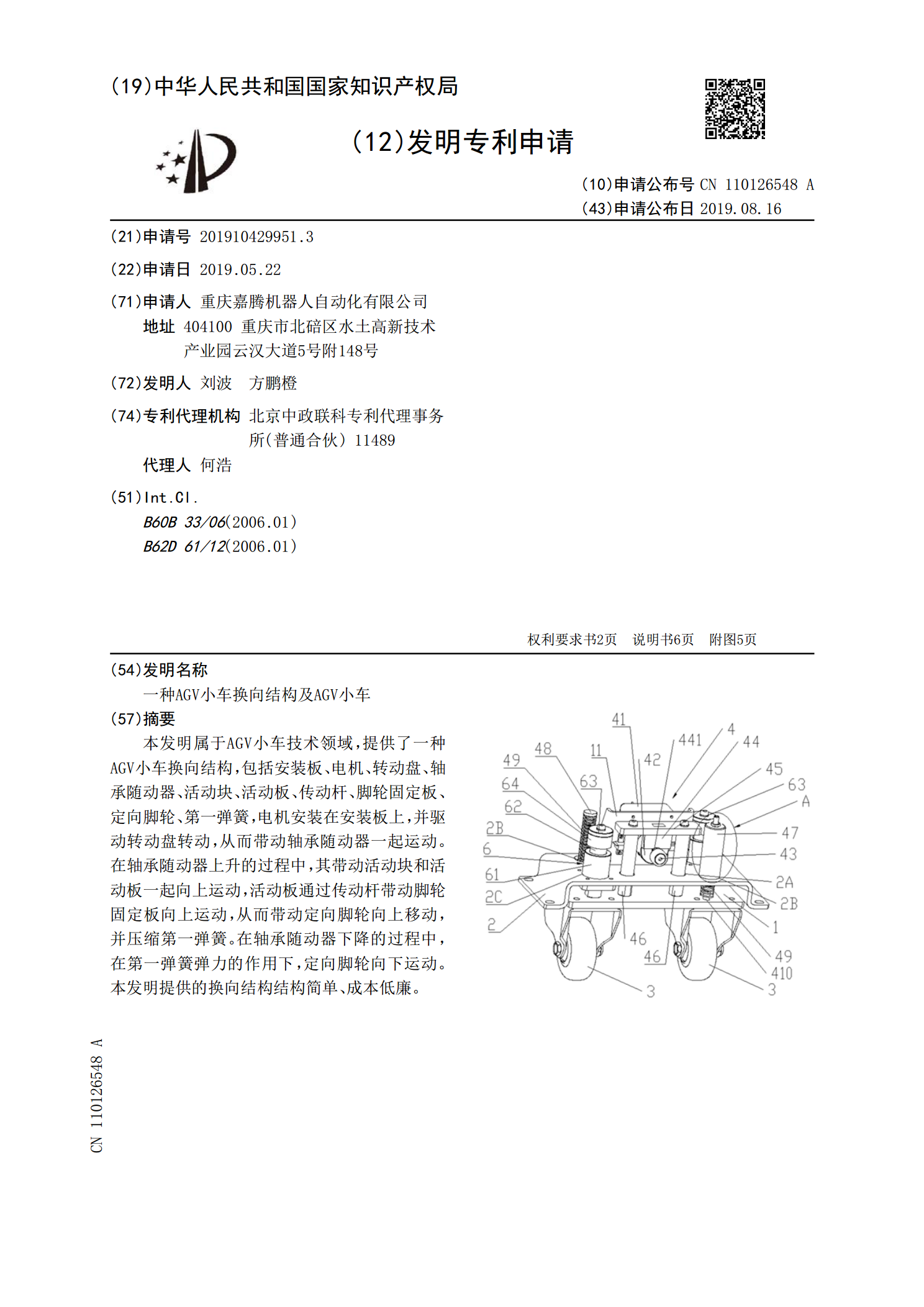
本发明属于AGV小车技术领域,提供了一种AGV小车换向结构,包括安装板、电机、转动盘、轴承随动器、活动块、活动板、传动杆、脚轮固定板、定向脚轮、第一弹簧,电机安装在安装板上,并驱动转动盘转动,从而带动轴承随动器一起运动。在轴承随动器上升的过程中,其带动活动块和活动板一起向上运动,活动板通过传动杆带动脚轮固定板向上运动,从而带动定向脚轮向上移动,并压缩第一弹簧。在轴承随动器下降的过程中,在第一弹簧弹力的作用下,定向脚轮向下运动。本发明提供的换向结构结构简单、成本低廉。

一种带移载小车的立体仓库.pdf
本发明涉及仓储设备技术领域,公开了一种带移载小车的立体仓库,包括货架,货架由若干货架单元组合而成,货架单元包括两排竖直的立柱,每排立柱的侧面设有水平的支撑轨,支撑轨的顶面为托盘支撑面,支撑轨的外侧面下端向外延伸形成小车导轨,小车导轨所在高度低于托盘支撑面所在高度;同一货架单元内的两个小车导轨之间设有移载小车,移载小车底部设有可在小车导轨上滑动的底轮,每个货架单元上还设有移载小车驱动机构,移载小车的顶面设有托板,移载小车内设有可驱动托板升降的顶升装置。本发明具有通过移载小车对货物进行进出库搬运,机动灵活、效