
一种机器人移动底盘.pdf

明钰****甜甜

1/5
2/5
3/5
4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种全向移动的底盘、全向移动的底盘系统及机器人系统.pdf
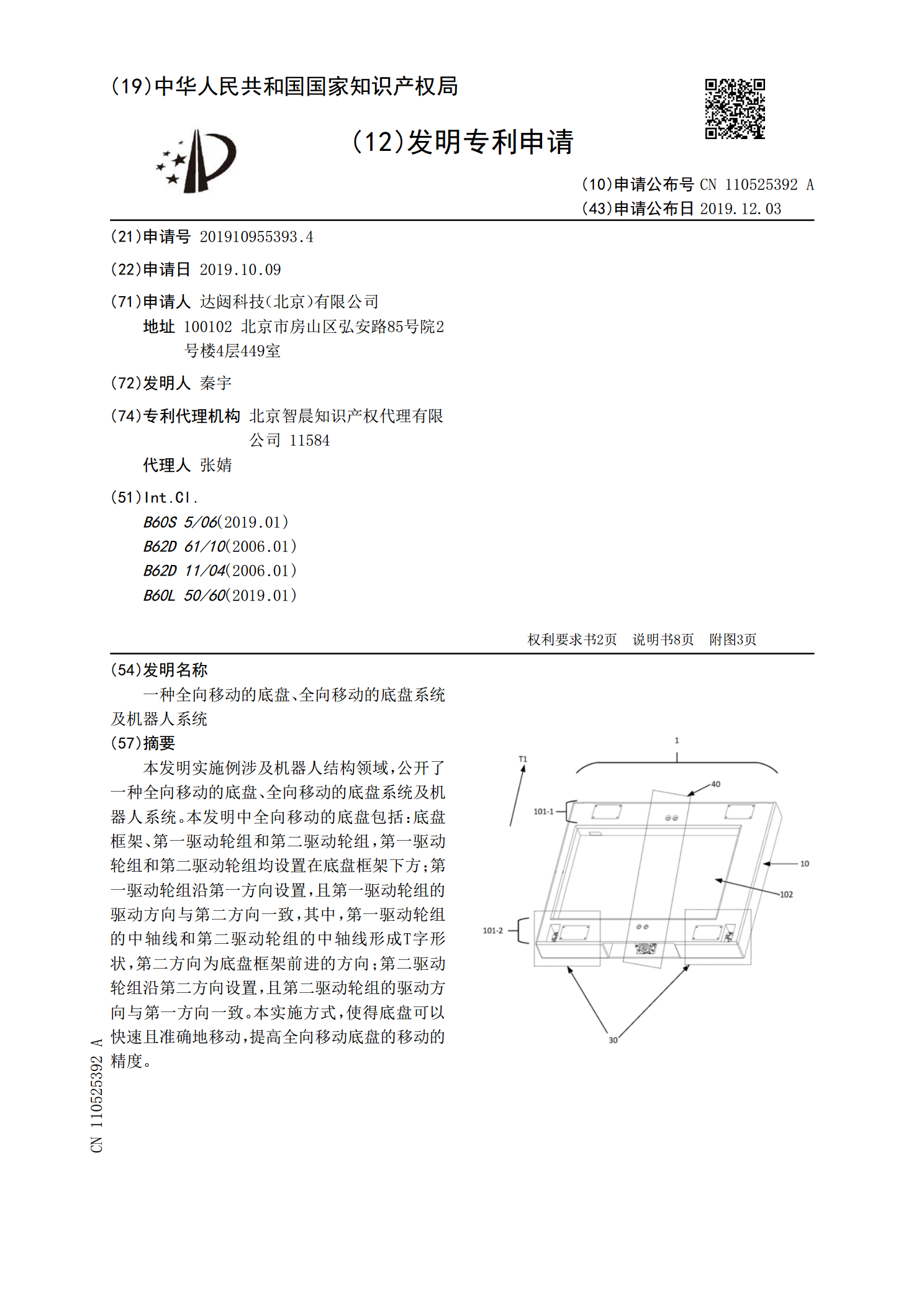
本发明实施例涉及机器人结构领域,公开了一种全向移动的底盘、全向移动的底盘系统及机器人系统。本发明中全向移动的底盘包括:底盘框架、第一驱动轮组和第二驱动轮组,第一驱动轮组和第二驱动轮组均设置在底盘框架下方;第一驱动轮组沿第一方向设置,且第一驱动轮组的驱动方向与第二方向一致,其中,第一驱动轮组的中轴线和第二驱动轮组的中轴线形成T字形状,第二方向为底盘框架前进的方向;第二驱动轮组沿第二方向设置,且第二驱动轮组的驱动方向与第一方向一致。本实施方式,使得底盘可以快速且准确地移动,提高全向移动底盘的移动的精度。
一种机器人移动底盘.pdf
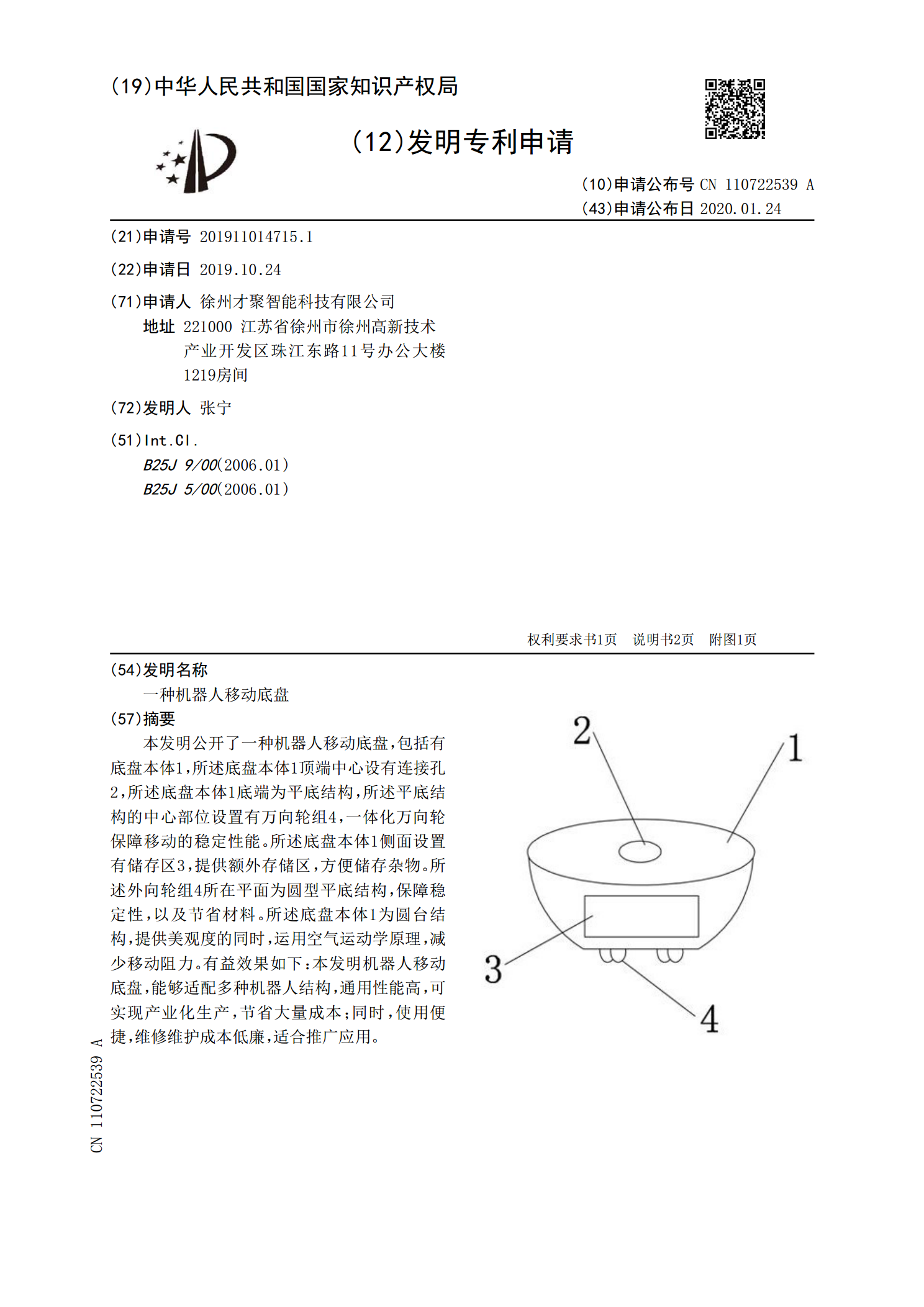
本发明公开了一种机器人移动底盘,包括有底盘本体1,所述底盘本体1顶端中心设有连接孔2,所述底盘本体1底端为平底结构,所述平底结构的中心部位设置有万向轮组4,一体化万向轮保障移动的稳定性能。所述底盘本体1侧面设置有储存区3,提供额外存储区,方便储存杂物。所述外向轮组4所在平面为圆型平底结构,保障稳定性,以及节省材料。所述底盘本体1为圆台结构,提供美观度的同时,运用空气运动学原理,减少移动阻力。有益效果如下:本发明机器人移动底盘,能够适配多种机器人结构,通用性能高,可实现产业化生产,节省大量成本;同时,使用便
一种机器人移动底盘.pdf
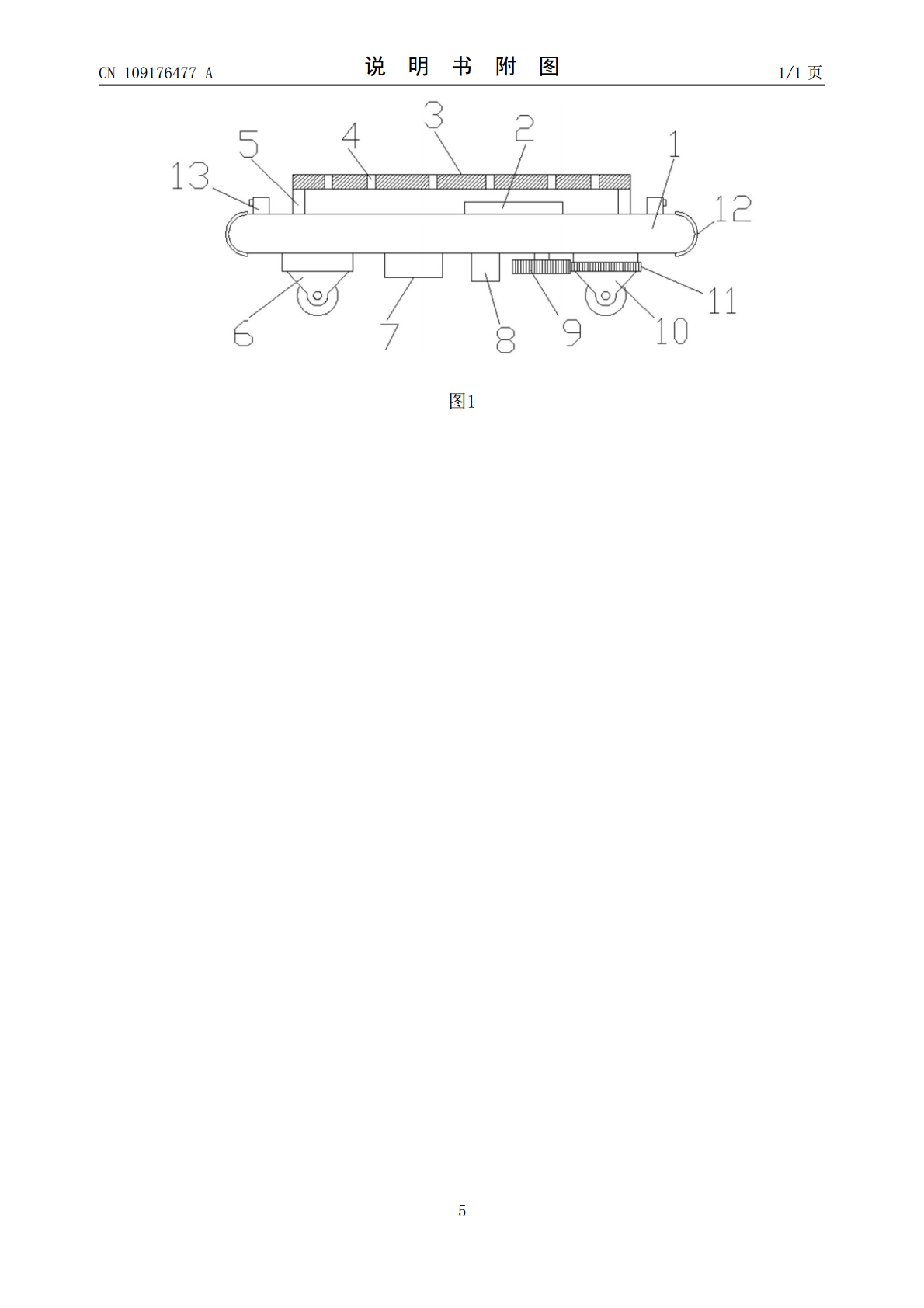
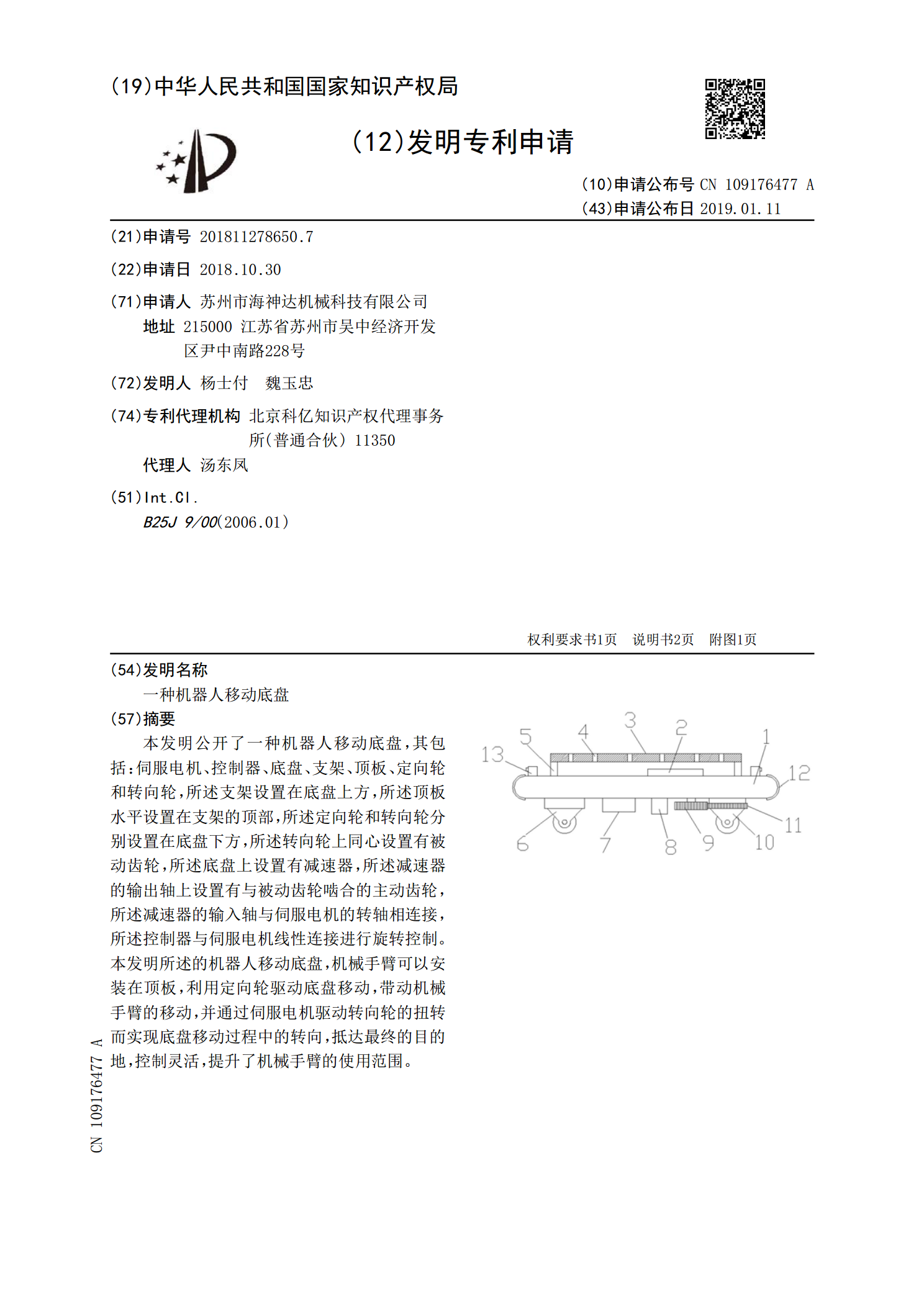
本发明公开了一种机器人移动底盘,其包括:伺服电机、控制器、底盘、支架、顶板、定向轮和转向轮,所述支架设置在底盘上方,所述顶板水平设置在支架的顶部,所述定向轮和转向轮分别设置在底盘下方,所述转向轮上同心设置有被动齿轮,所述底盘上设置有减速器,所述减速器的输出轴上设置有与被动齿轮啮合的主动齿轮,所述减速器的输入轴与伺服电机的转轴相连接,所述控制器与伺服电机线性连接进行旋转控制。本发明所述的机器人移动底盘,机械手臂可以安装在顶板,利用定向轮驱动底盘移动,带动机械手臂的移动,并通过伺服电机驱动转向轮的扭转而实现底
一种机器人移动底盘.pdf
本发明涉及机器人技术领域,尤其是一种机器人移动底盘,包括移动底盘本体,所述移动底盘本体的底部设置有行走轮机构,行走轮机构中的行走轮的数量设置为四个,且四个行走轮分别位于移动底盘本体的底部两侧,所述移动底盘本体两侧的顶部均连接有水平设置的顶部护板,所述顶部护板罩设在同侧的两个行走轮的上方,所述顶部护板远离移动底盘本体一端的底面连接有竖直设置的第二侧护板,所述顶部护板两侧的底部均连接有竖直设置的第一侧护板,所述第一侧护板的侧边与第二侧护板连接。本发明可有效避免行走轮在移动过程中绞入杂物的情况,便于行走轮的移动
一种移动底盘、清洁机器人及移动底盘的移动控制方法.pdf
本发明提供一种移动底盘、清洁机器人及移动底盘的移动控制方法,涉及清洁机器人技术领域。移动控制方法包括通过负压组件使吸附机构处于负压状态,以使吸附机构吸附于待行走表面;通过行走驱动部件驱动底盘主体移动,以使旋转件转动并使多个吸附机构交替地与待行走表面吸附和脱离。本发明的移动控制方法,将多个吸附机构设置于与底盘主体转动配合的旋转件。当行走驱动部件驱动底盘主体移动时,多个吸附机构可以交替地与待行走表面接触吸附或脱离,保证移动底盘具有良好的贴壁性能。通过将移动底盘与待行走表面之间的滑动摩擦替换为滚动摩擦,减小移动