
用于控制车辆的后轮转向的方法和装置.pdf

猫巷****提格

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于控制车辆的后轮转向的方法和装置.pdf
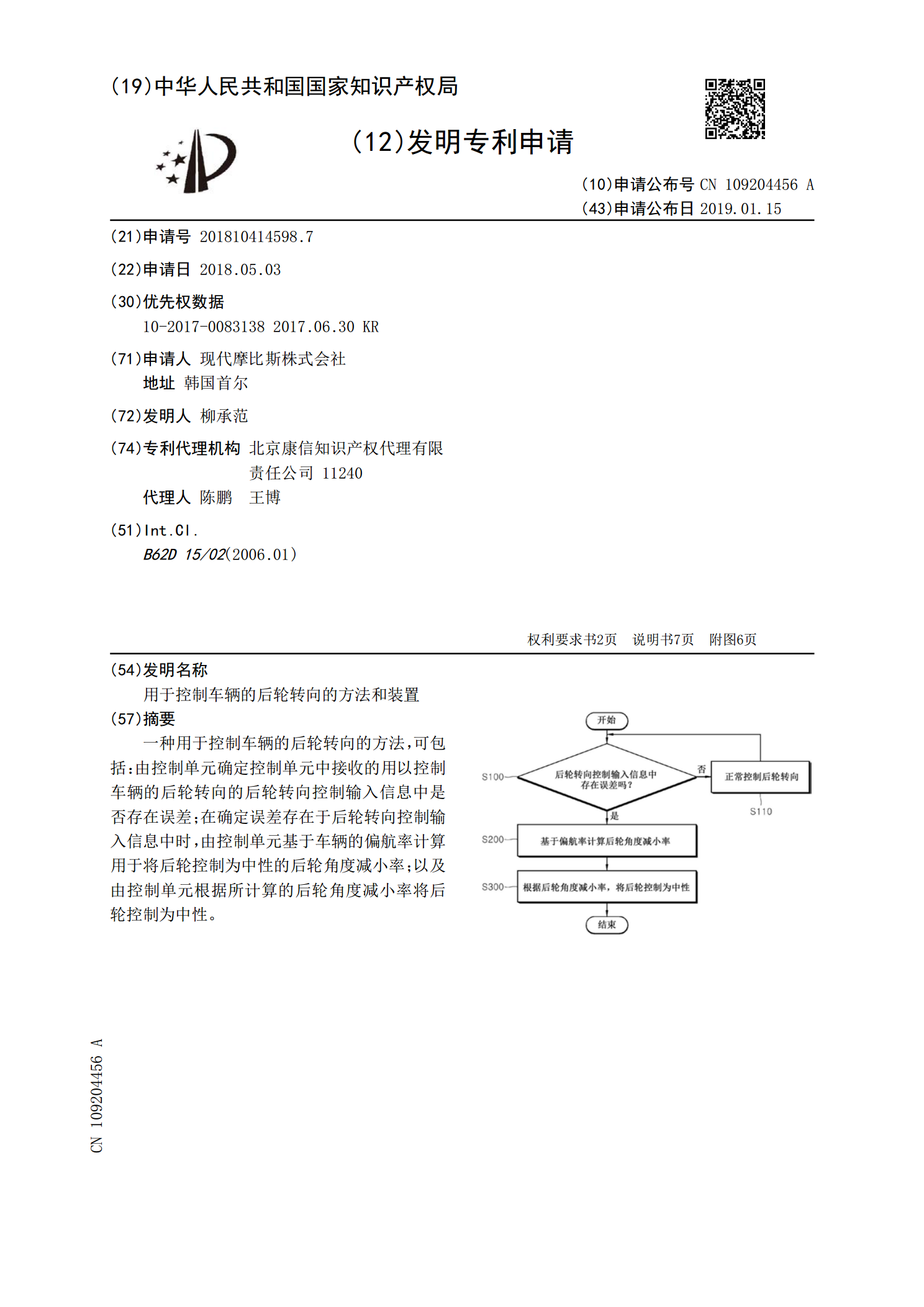
一种用于控制车辆的后轮转向的方法,可包括:由控制单元确定控制单元中接收的用以控制车辆的后轮转向的后轮转向控制输入信息中是否存在误差;在确定误差存在于后轮转向控制输入信息中时,由控制单元基于车辆的偏航率计算用于将后轮控制为中性的后轮角度减小率;以及由控制单元根据所计算的后轮角度减小率将后轮控制为中性。
用于控制后轮转向系统的装置和方法.pdf
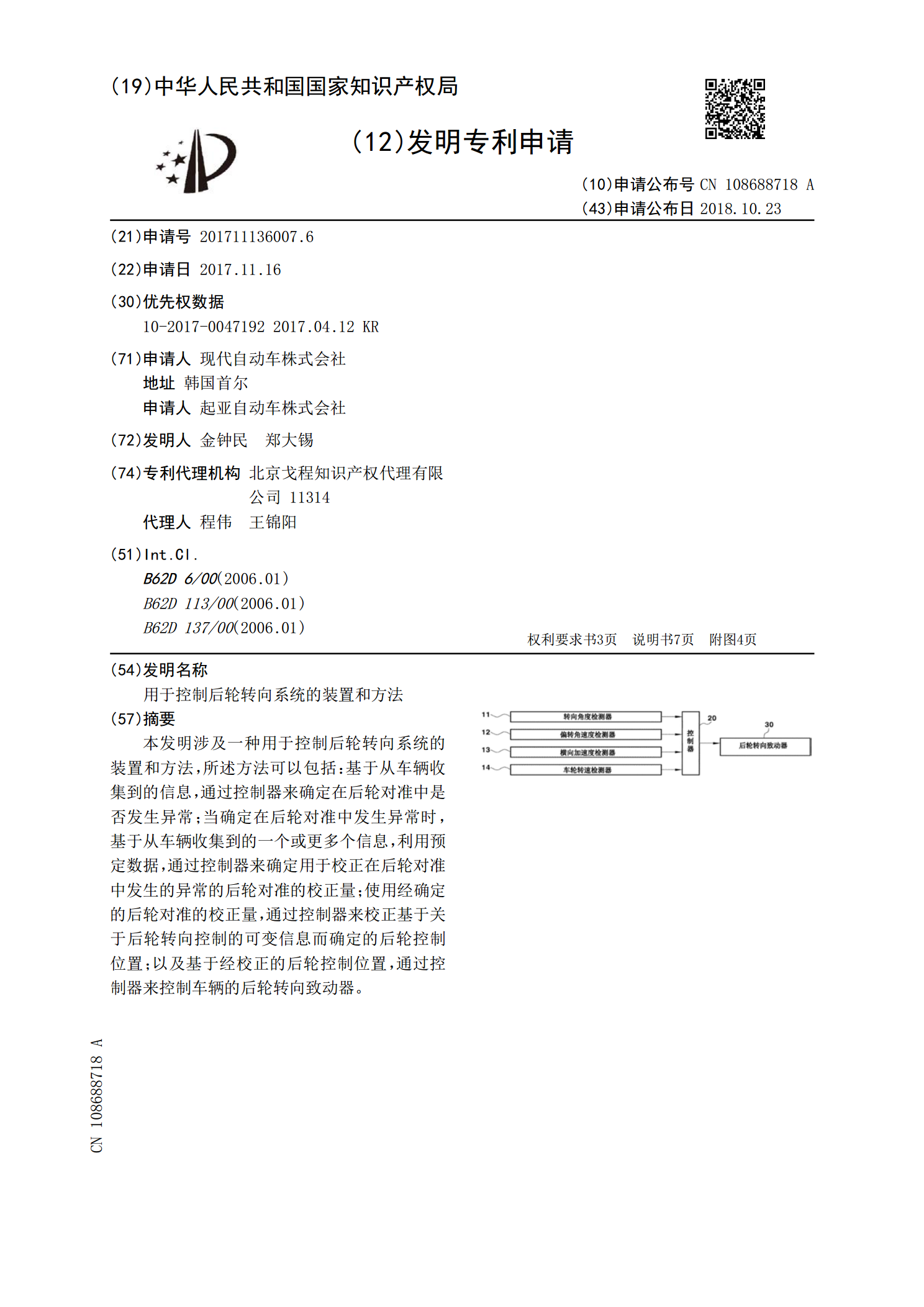
本发明涉及一种用于控制后轮转向系统的装置和方法,所述方法可以包括:基于从车辆收集到的信息,通过控制器来确定在后轮对准中是否发生异常;当确定在后轮对准中发生异常时,基于从车辆收集到的一个或更多个信息,利用预定数据,通过控制器来确定用于校正在后轮对准中发生的异常的后轮对准的校正量;使用经确定的后轮对准的校正量,通过控制器来校正基于关于后轮转向控制的可变信息而确定的后轮控制位置;以及基于经校正的后轮控制位置,通过控制器来控制车辆的后轮转向致动器。

用于控制后轮转向的装置及方法.pdf
用于控制后轮转向的装置及方法。本发明提供了后轮转向控制技术。具体地,根据本发明的一方面,用于控制后轮转向控制的后轮转向控制装置可以包括:车辆数据收集单元,所述车辆数据收集单元被配置为接收包括转向角数据、转向扭矩数据、车速数据、偏航率数据或横向加速度数据中的至少一种数据的车辆数据;车辆数据确定单元,所述车辆数据确定单元被配置为确定包括在所述车辆数据中的所述转向角数据是否正常;以及后轮转向控制单元,所述后轮转向控制单元被配置为在所述转向角数据被确定为异常时基于所述转向扭矩数据、所述车速数据、所述偏航率数据或所
用于操作后轮转向系统的方法和车辆的后轮转向系统.pdf
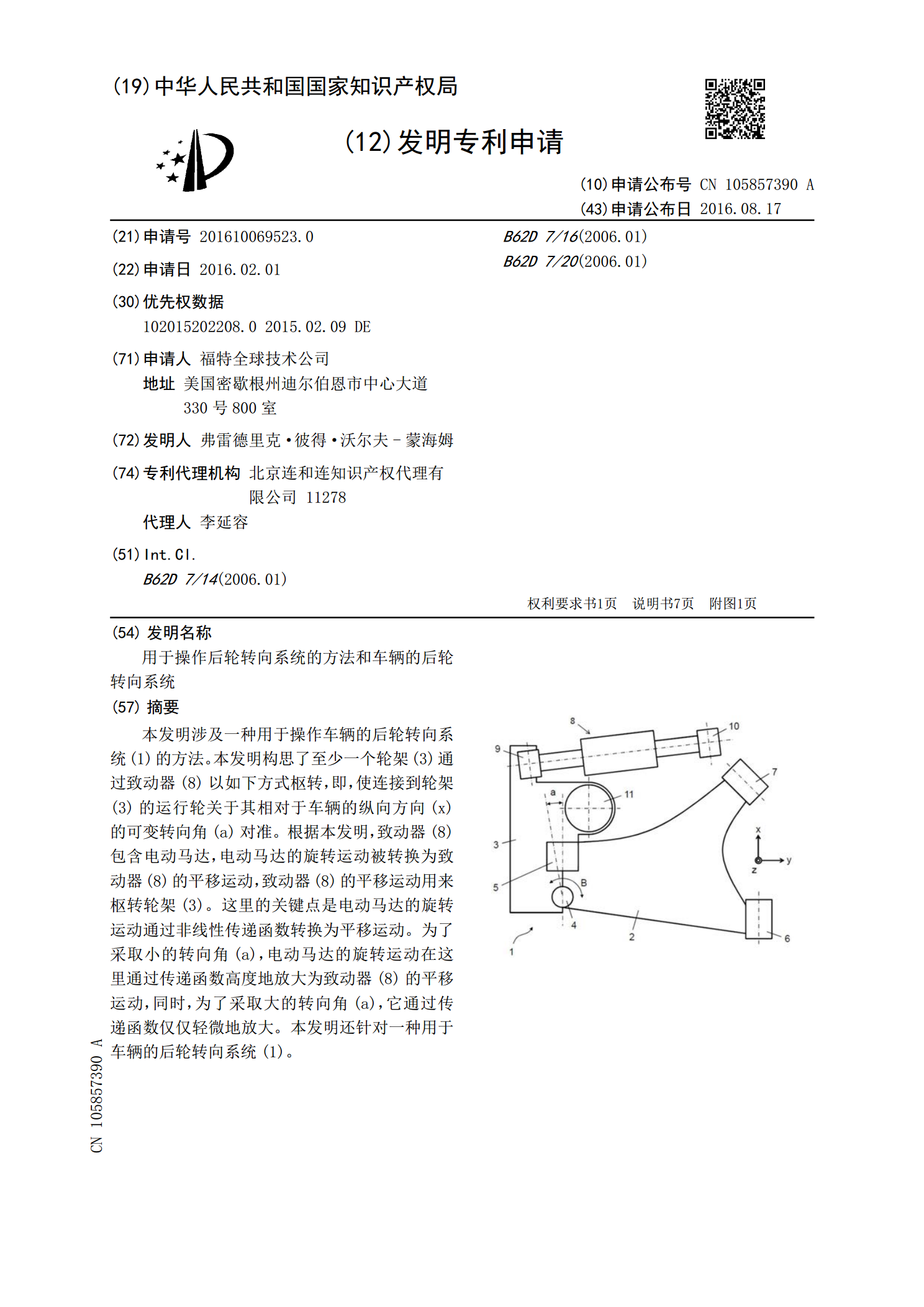
本发明涉及一种用于操作车辆的后轮转向系统(1)的方法。本发明构思了至少一个轮架(3)通过致动器(8)以如下方式枢转,即,使连接到轮架(3)的运行轮关于其相对于车辆的纵向方向(x)的可变转向角(a)对准。根据本发明,致动器(8)包含电动马达,电动马达的旋转运动被转换为致动器(8)的平移运动,致动器(8)的平移运动用来枢转轮架(3)。这里的关键点是电动马达的旋转运动通过非线性传递函数转换为平移运动。为了采取小的转向角(a),电动马达的旋转运动在这里通过传递函数高度地放大为致动器(8)的平移运动,同时,为了采取

后轮随动转向系统的控制方法、装置、系统和车辆.pdf
本公开涉及一种后轮随动转向系统的控制方法、装置、系统和车辆,该方法应用于车辆,包括:获取开关信号,开关信号用于控制车辆的后轮随动转向系统的工作状态,后轮随动转向系统的工作状态包括开启状态和关闭状态,当车辆的方向盘状态为回正状态时,控制车辆的后轮回正,当后轮回正时,根据开关信号控制后轮随动转向系统的工作状态。能够提高后轮随动转向系统的安全性和稳定性。