
一种自移动扫地机器人用越障驱动轮组.pdf

是你****韵呀


1/9
2/9
3/9
4/9

5/9
6/9
7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种自移动扫地机器人用越障驱动轮组.pdf
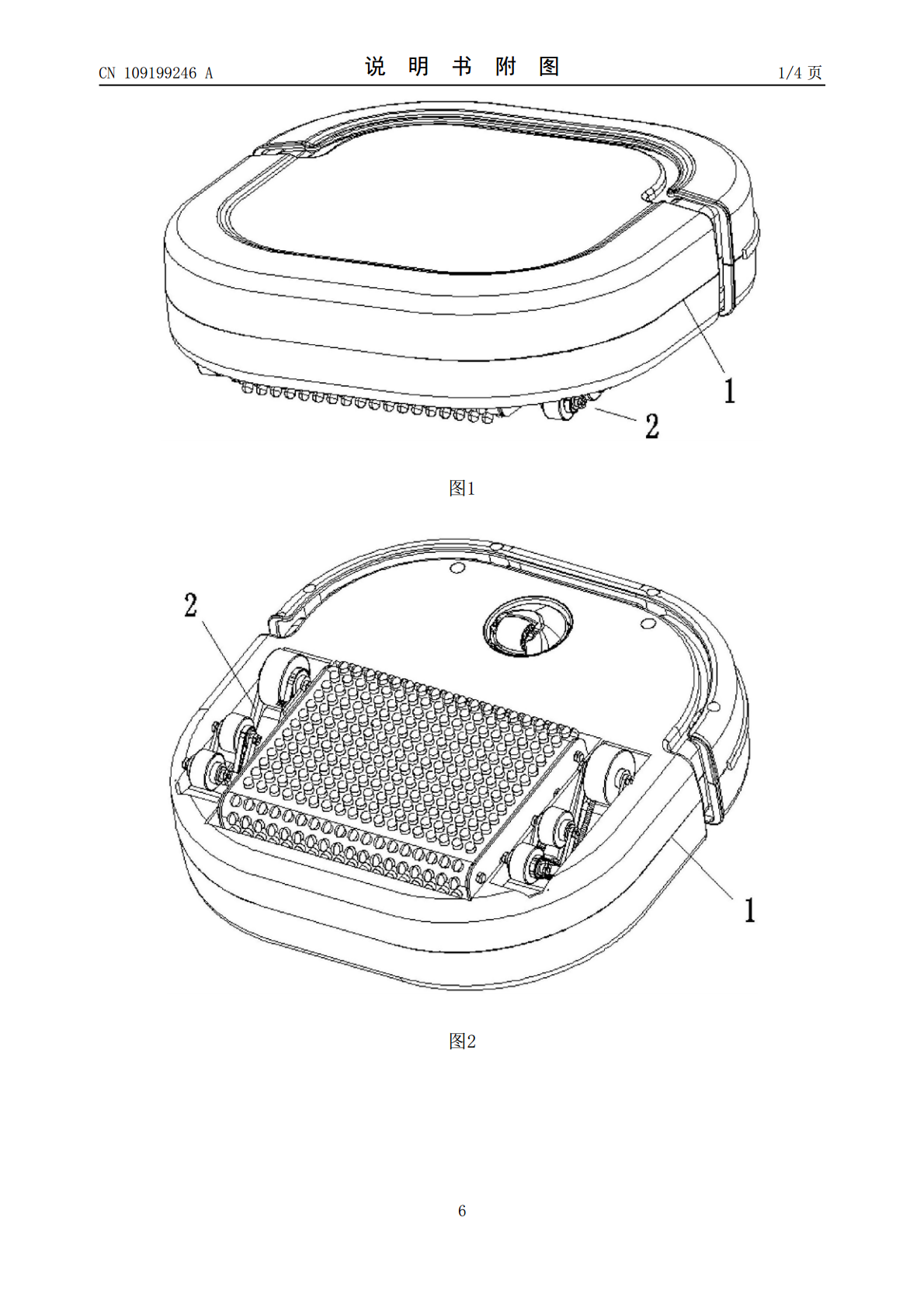
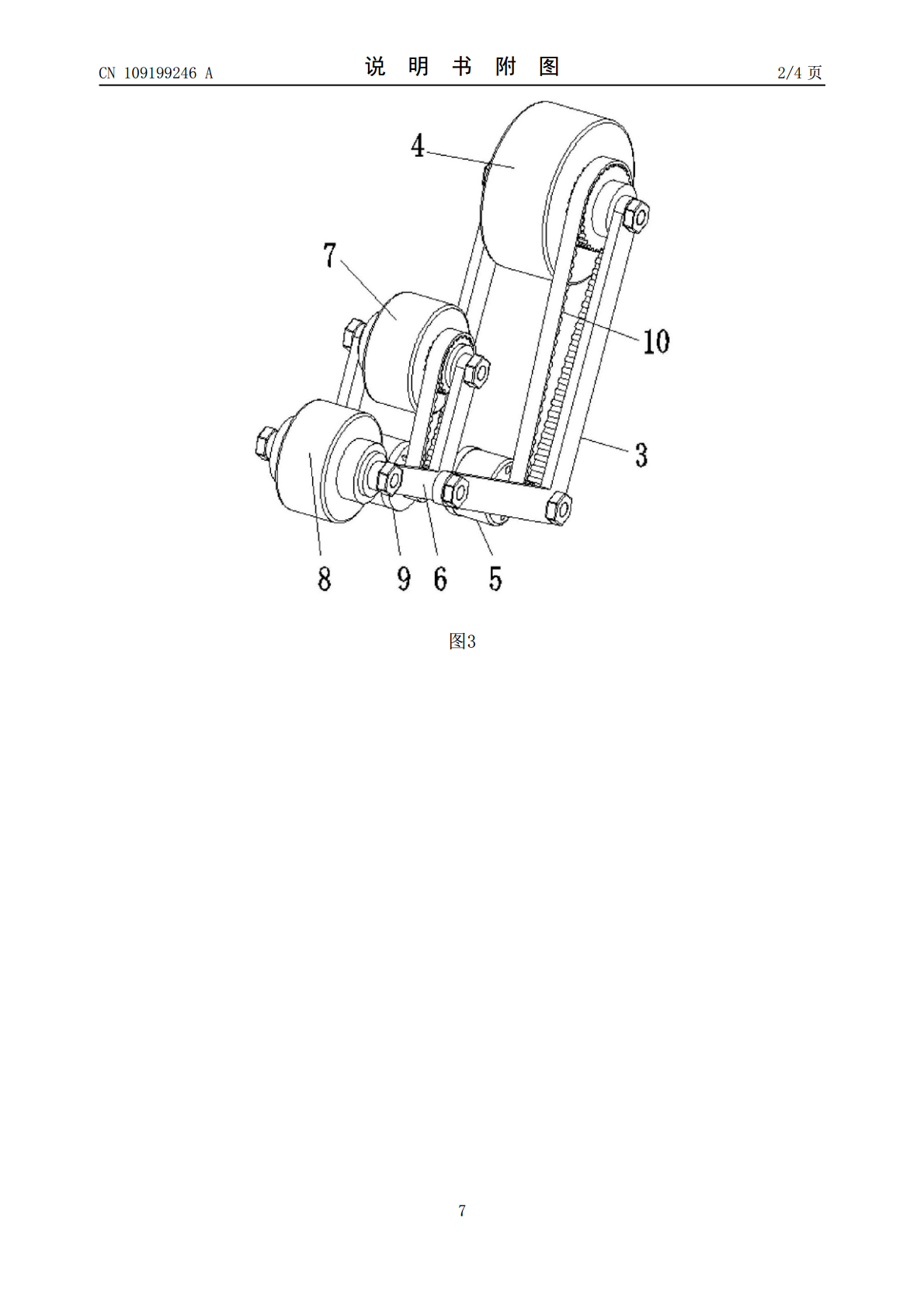
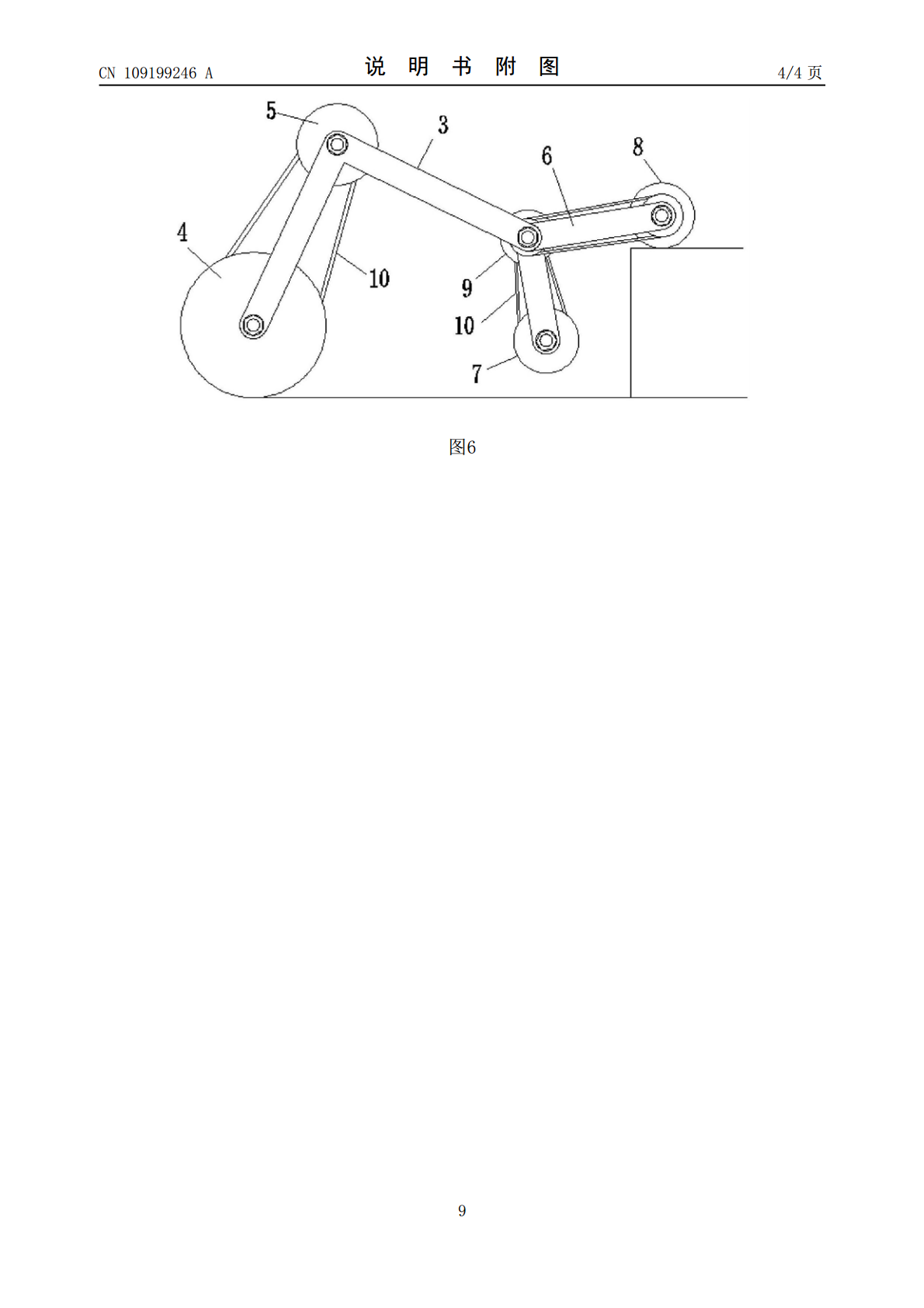
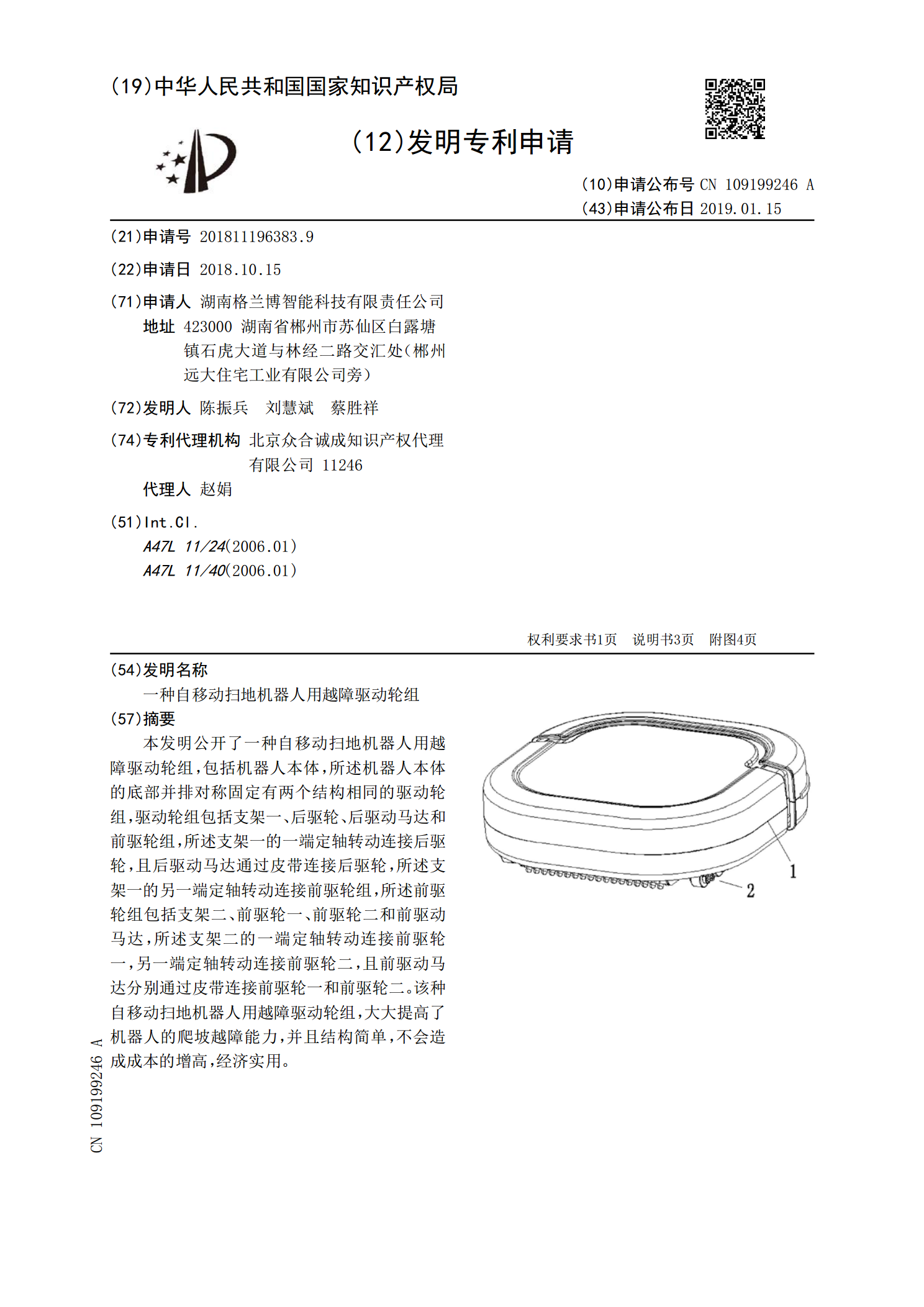
本发明公开了一种自移动扫地机器人用越障驱动轮组,包括机器人本体,所述机器人本体的底部并排对称固定有两个结构相同的驱动轮组,驱动轮组包括支架一、后驱轮、后驱动马达和前驱轮组,所述支架一的一端定轴转动连接后驱轮,且后驱动马达通过皮带连接后驱轮,所述支架一的另一端定轴转动连接前驱轮组,所述前驱轮组包括支架二、前驱轮一、前驱轮二和前驱动马达,所述支架二的一端定轴转动连接前驱轮一,另一端定轴转动连接前驱轮二,且前驱动马达分别通过皮带连接前驱轮一和前驱轮二。该种自移动扫地机器人用越障驱动轮组,大大提高了机器人的爬坡越
机器人用驱动轮组及扫地机器人.pdf
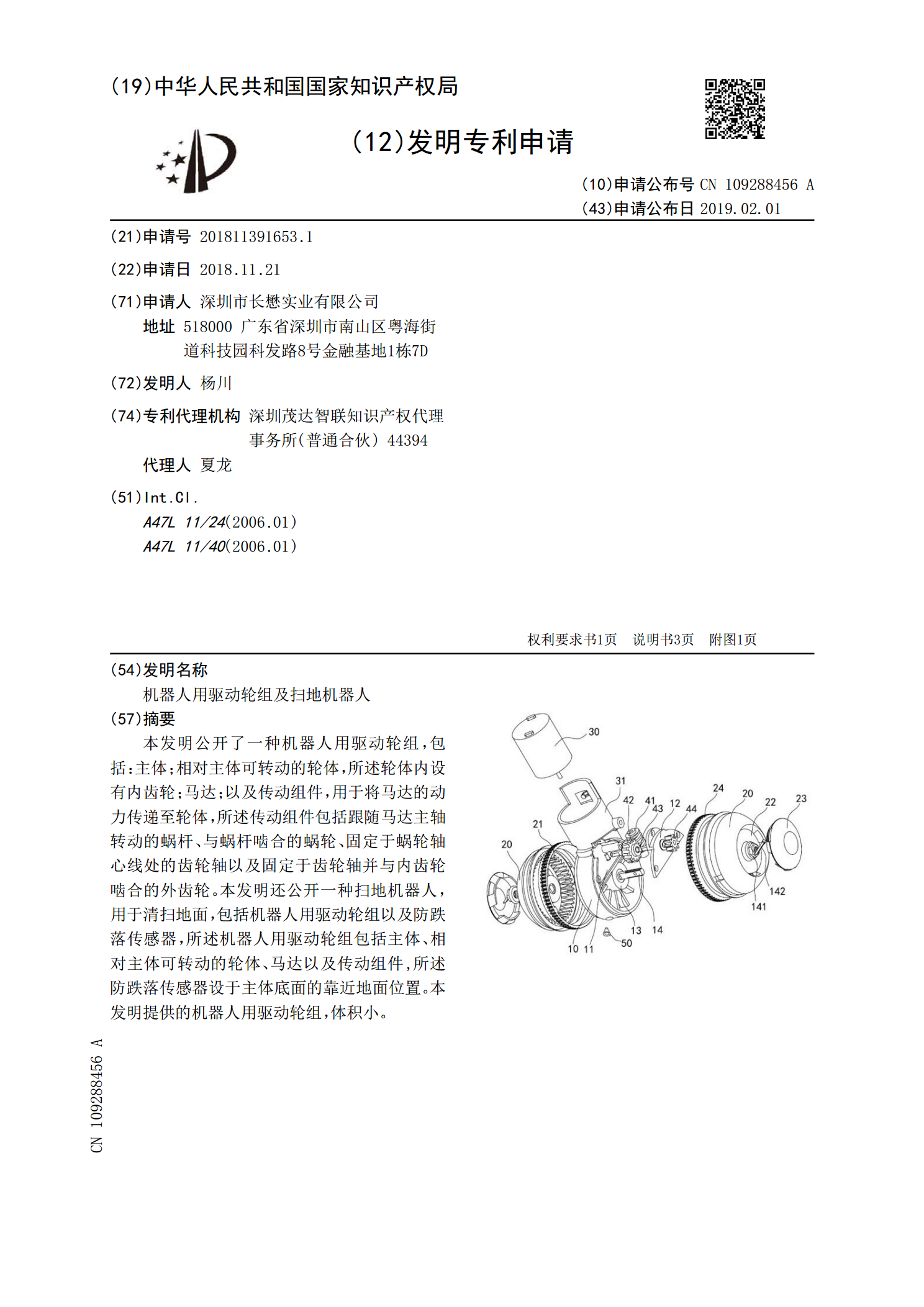
本发明公开了一种机器人用驱动轮组,包括:主体;相对主体可转动的轮体,所述轮体内设有内齿轮;马达;以及传动组件,用于将马达的动力传递至轮体,所述传动组件包括跟随马达主轴转动的蜗杆、与蜗杆啮合的蜗轮、固定于蜗轮轴心线处的齿轮轴以及固定于齿轮轴并与内齿轮啮合的外齿轮。本发明还公开一种扫地机器人,用于清扫地面,包括机器人用驱动轮组以及防跌落传感器,所述机器人用驱动轮组包括主体、相对主体可转动的轮体、马达以及传动组件,所述防跌落传感器设于主体底面的靠近地面位置。本发明提供的机器人用驱动轮组,体积小。
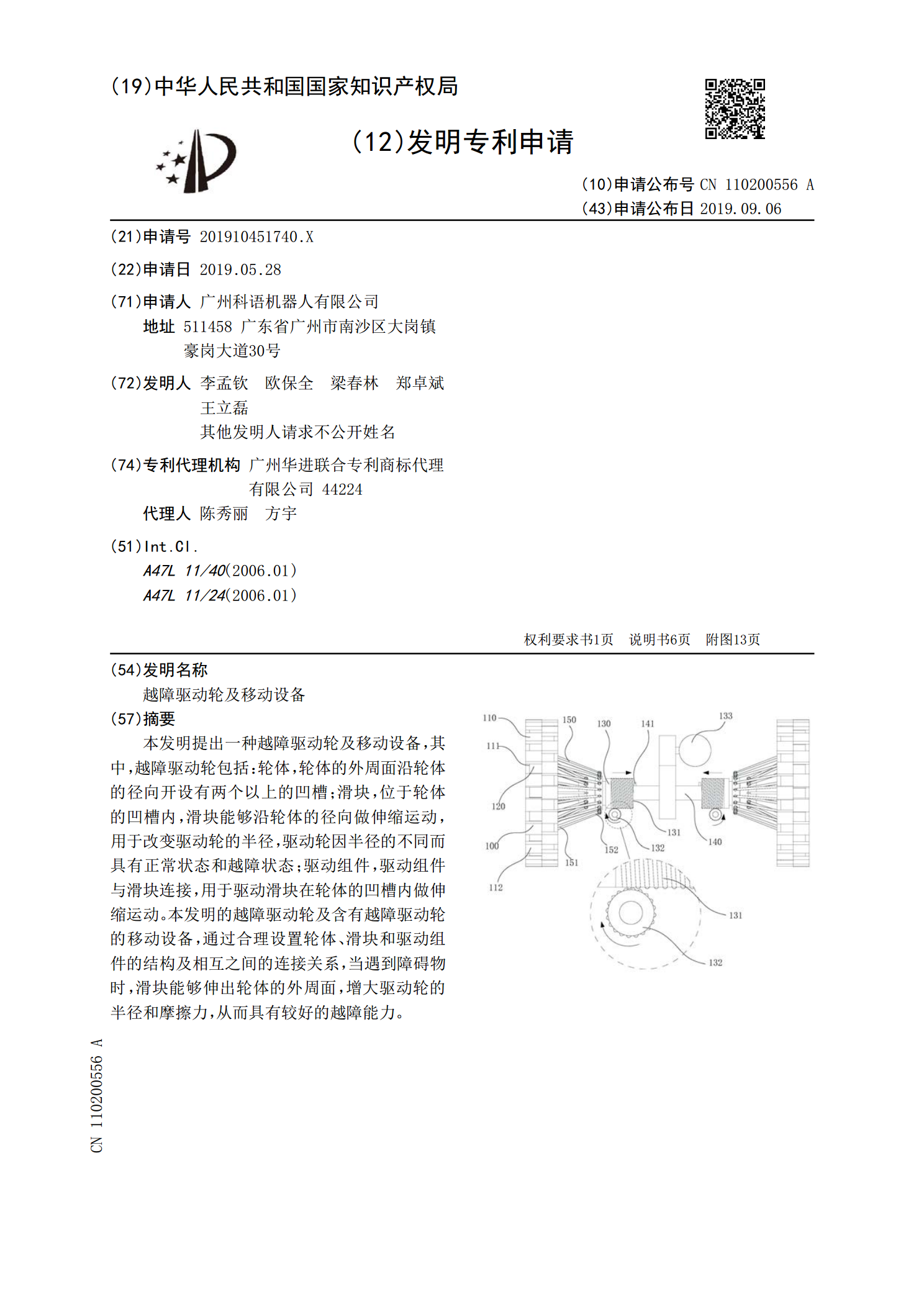
越障驱动轮及移动设备.pdf
本发明提出一种越障驱动轮及移动设备,其中,越障驱动轮包括:轮体,轮体的外周面沿轮体的径向开设有两个以上的凹槽;滑块,位于轮体的凹槽内,滑块能够沿轮体的径向做伸缩运动,用于改变驱动轮的半径,驱动轮因半径的不同而具有正常状态和越障状态;驱动组件,驱动组件与滑块连接,用于驱动滑块在轮体的凹槽内做伸缩运动。本发明的越障驱动轮及含有越障驱动轮的移动设备,通过合理设置轮体、滑块和驱动组件的结构及相互之间的连接关系,当遇到障碍物时,滑块能够伸出轮体的外周面,增大驱动轮的半径和摩擦力,从而具有较好的越障能力。
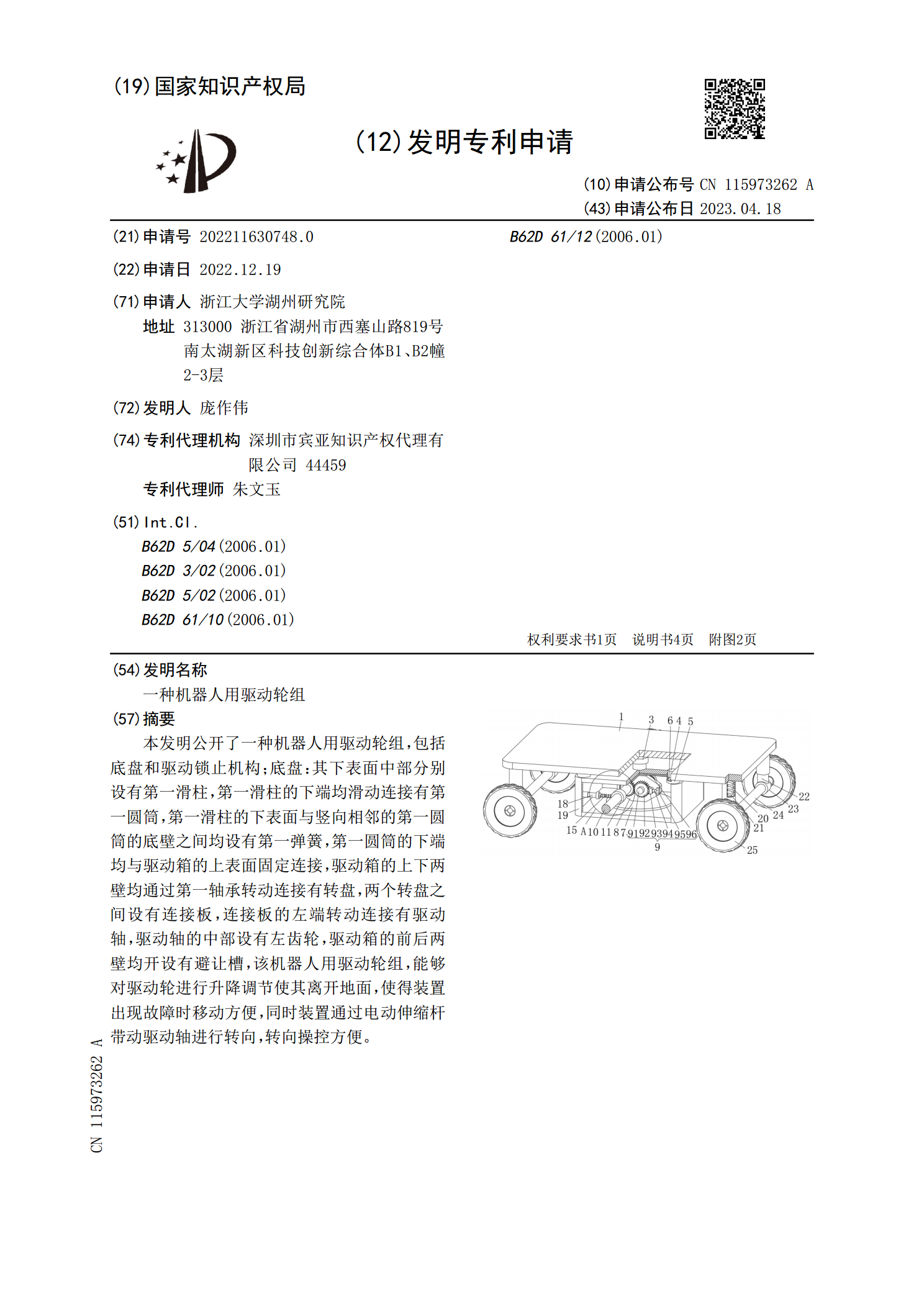
一种机器人用驱动轮组.pdf
本发明公开了一种机器人用驱动轮组,包括底盘和驱动锁止机构;底盘:其下表面中部分别设有第一滑柱,第一滑柱的下端均滑动连接有第一圆筒,第一滑柱的下表面与竖向相邻的第一圆筒的底壁之间均设有第一弹簧,第一圆筒的下端均与驱动箱的上表面固定连接,驱动箱的上下两壁均通过第一轴承转动连接有转盘,两个转盘之间设有连接板,连接板的左端转动连接有驱动轴,驱动轴的中部设有左齿轮,驱动箱的前后两壁均开设有避让槽,该机器人用驱动轮组,能够对驱动轮进行升降调节使其离开地面,使得装置出现故障时移动方便,同时装置通过电动伸缩杆带动驱动轴进
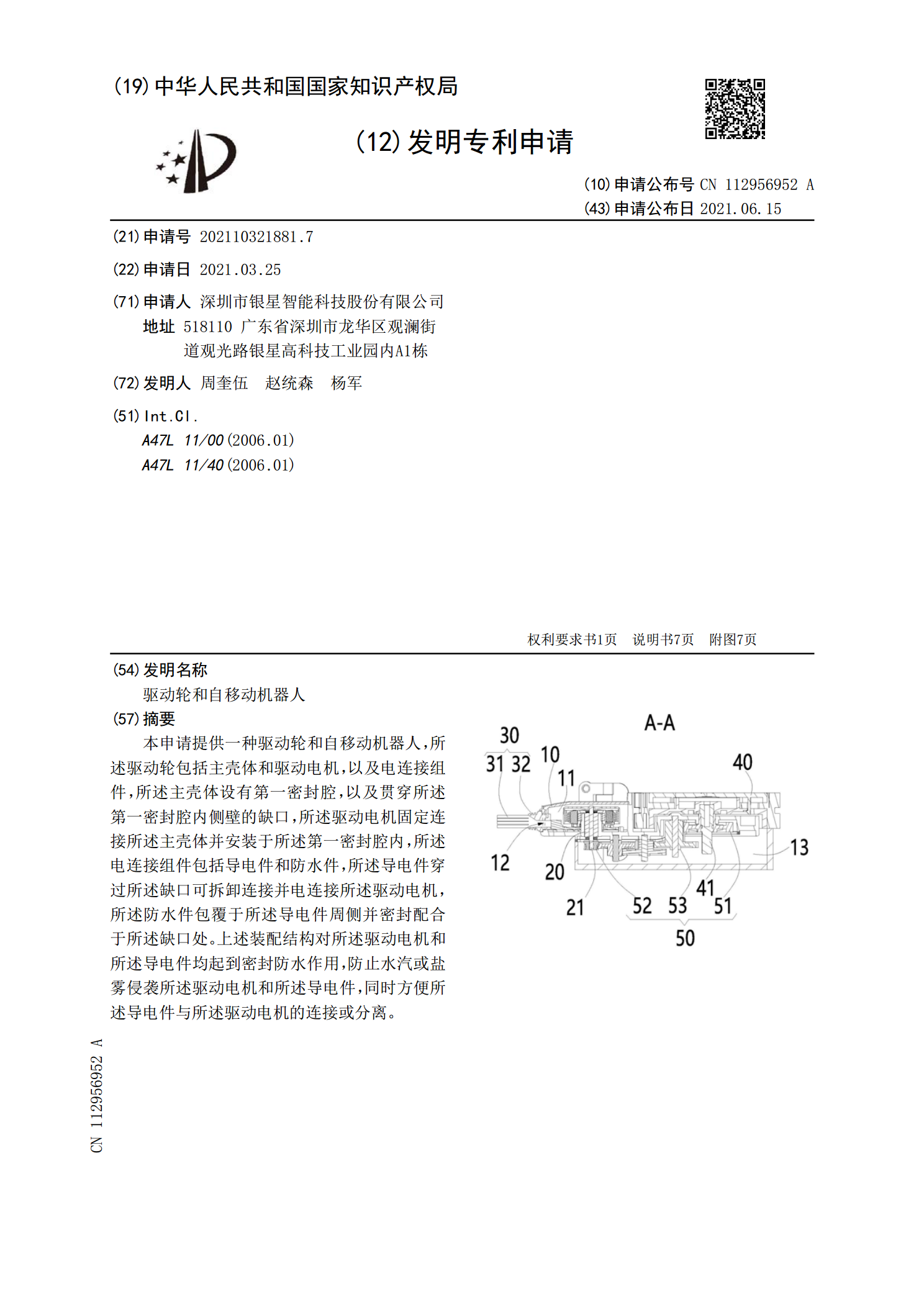
驱动轮和自移动机器人.pdf
本申请提供一种驱动轮和自移动机器人,所述驱动轮包括主壳体和驱动电机,以及电连接组件,所述主壳体设有第一密封腔,以及贯穿所述第一密封腔内侧壁的缺口,所述驱动电机固定连接所述主壳体并安装于所述第一密封腔内,所述电连接组件包括导电件和防水件,所述导电件穿过所述缺口可拆卸连接并电连接所述驱动电机,所述防水件包覆于所述导电件周侧并密封配合于所述缺口处。上述装配结构对所述驱动电机和所述导电件均起到密封防水作用,防止水汽或盐雾侵袭所述驱动电机和所述导电件,同时方便所述导电件与所述驱动电机的连接或分离。