
一种全向移动智能轮椅床.pdf

一吃****书竹

1/10

2/10

3/10

4/10
5/10

6/10

7/10
8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种全向移动智能轮椅床.pdf
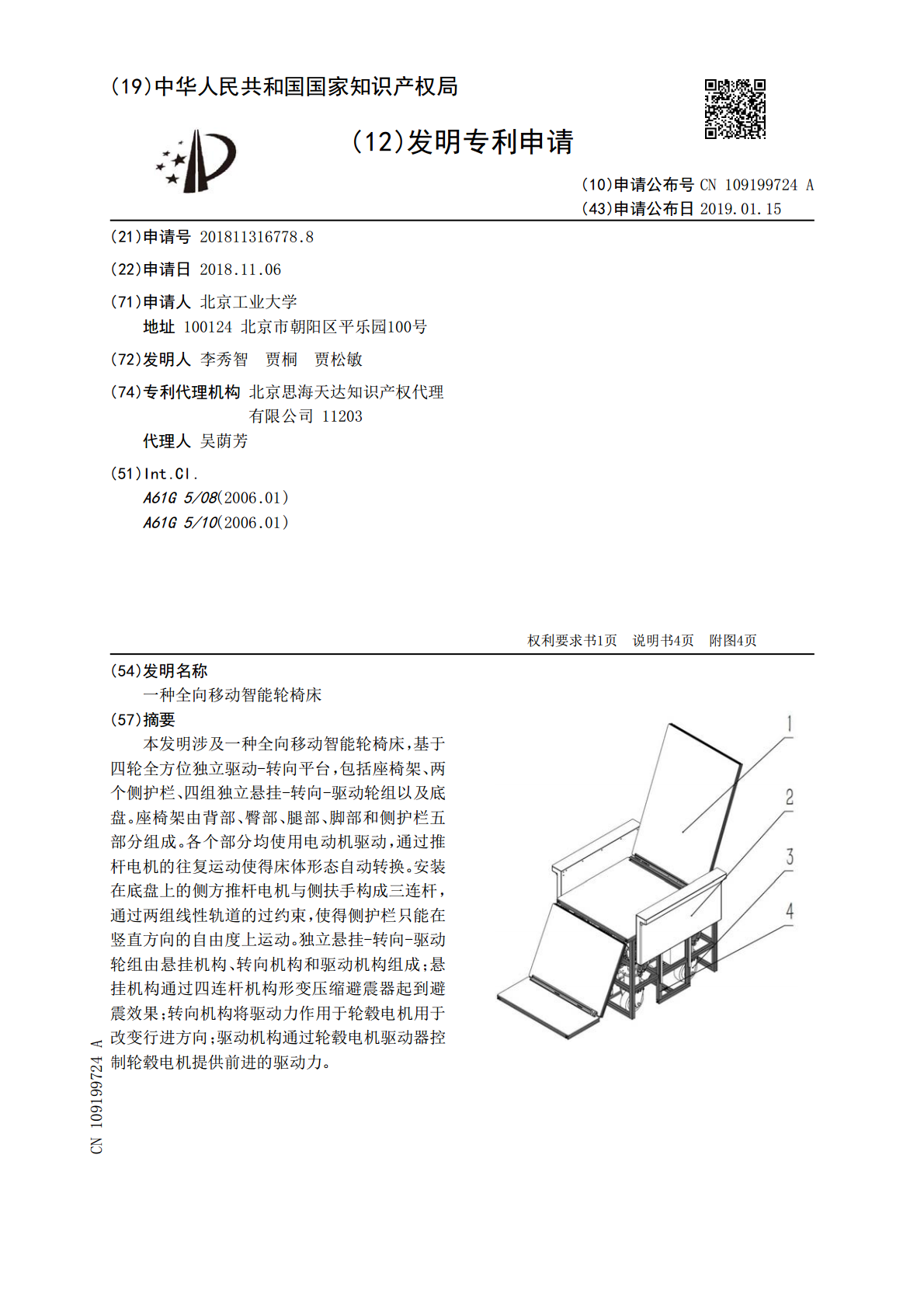
本发明涉及一种全向移动智能轮椅床,基于四轮全方位独立驱动‑转向平台,包括座椅架、两个侧护栏、四组独立悬挂‑转向‑驱动轮组以及底盘。座椅架由背部、臀部、腿部、脚部和侧护栏五部分组成。各个部分均使用电动机驱动,通过推杆电机的往复运动使得床体形态自动转换。安装在底盘上的侧方推杆电机与侧扶手构成三连杆,通过两组线性轨道的过约束,使得侧护栏只能在竖直方向的自由度上运动。独立悬挂‑转向‑驱动轮组由悬挂机构、转向机构和驱动机构组成;悬挂机构通过四连杆机构形变压缩避震器起到避震效果;转向机构将驱动力作用于轮毂电机用于改变
全向多功能轮椅床.pdf
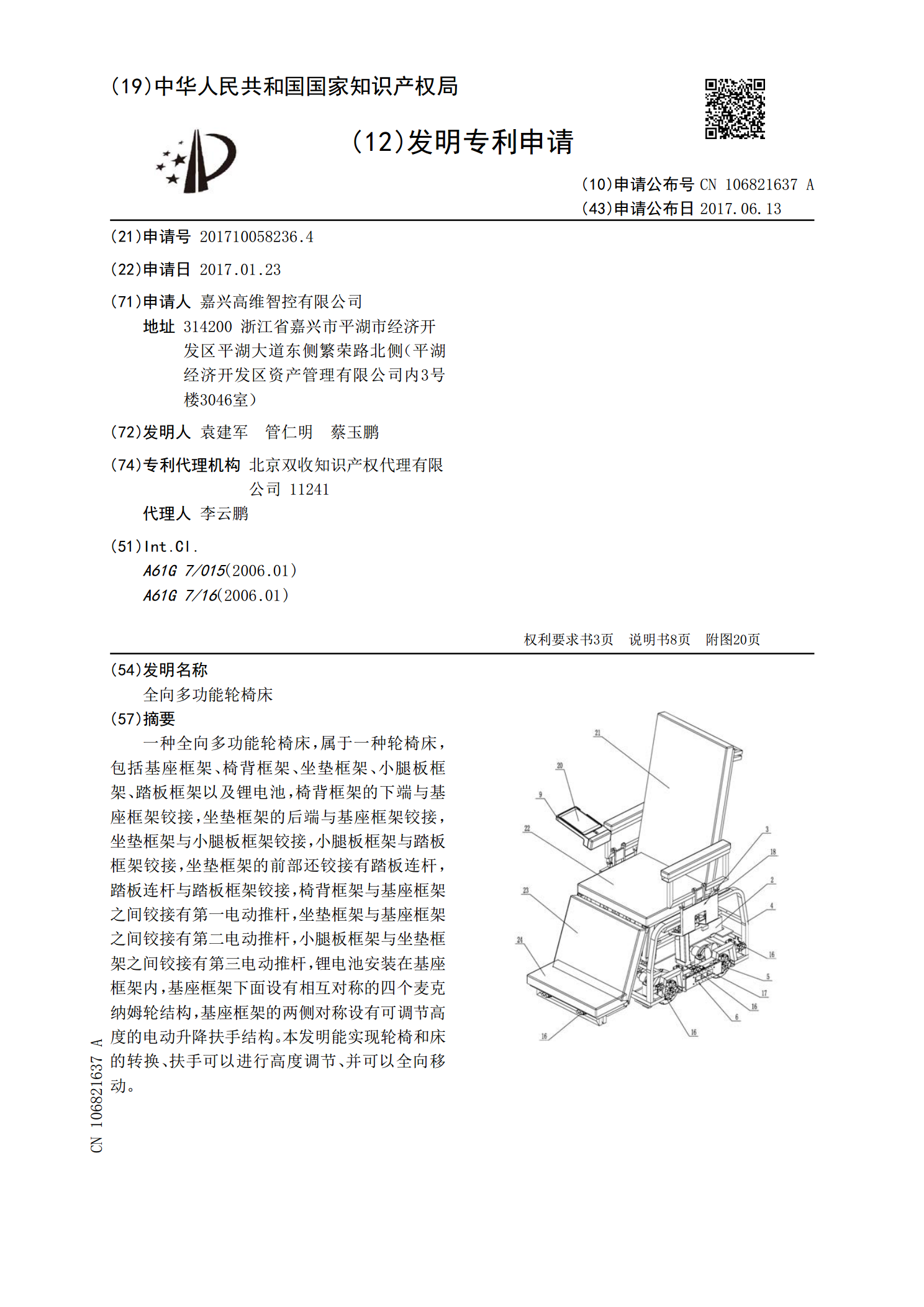
一种全向多功能轮椅床,属于一种轮椅床,包括基座框架、椅背框架、坐垫框架、小腿板框架、踏板框架以及锂电池,椅背框架的下端与基座框架铰接,坐垫框架的后端与基座框架铰接,坐垫框架与小腿板框架铰接,小腿板框架与踏板框架铰接,坐垫框架的前部还铰接有踏板连杆,踏板连杆与踏板框架铰接,椅背框架与基座框架之间铰接有第一电动推杆,坐垫框架与基座框架之间铰接有第二电动推杆,小腿板框架与坐垫框架之间铰接有第三电动推杆,锂电池安装在基座框架内,基座框架下面设有相互对称的四个麦克纳姆轮结构,基座框架的两侧对称设有可调节高度的电动升

全向智能电动轮椅.pdf
本发明公开了一种全向智能电动轮椅,包括底盘框架、座椅,底盘框架下方两侧分别铰接有左右相对应的驱动臂,驱动臂上连接有构成一对前轮和一对后轮的麦克纳姆轮,座椅下方两侧、座椅前方且位于一对前轮上方分别设有超声波传感器,麦克纳姆轮的外侧分别设有红外传感器,座椅的扶手上设有控制盒和操作手柄,驱动臂内还设有驱动控制板,驱动控制板线路连接有DSP处理器。本发明与常规的两轮后驱电动轮椅相比,具有如横向、斜向等全向移动能力,具有更大的运动灵活性,通过超声波传感器和红外传感器检测轮椅周围的环境,以此为乘坐者提供可能阻碍轮椅运
一种全向智能移动平台.pdf
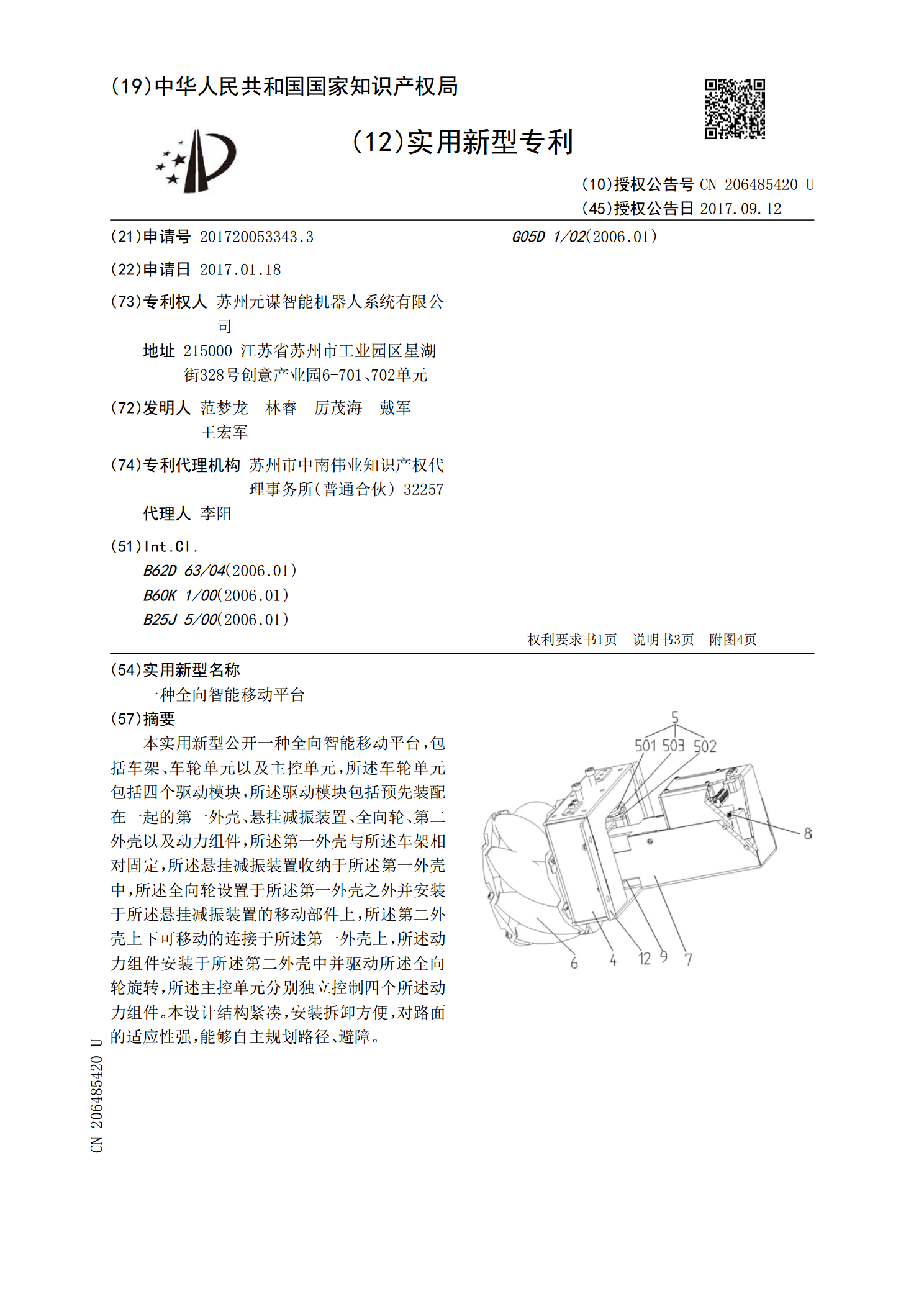
本实用新型公开一种全向智能移动平台,包括车架、车轮单元以及主控单元,所述车轮单元包括四个驱动模块,所述驱动模块包括预先装配在一起的第一外壳、悬挂减振装置、全向轮、第二外壳以及动力组件,所述第一外壳与所述车架相对固定,所述悬挂减振装置收纳于所述第一外壳中,所述全向轮设置于所述第一外壳之外并安装于所述悬挂减振装置的移动部件上,所述第二外壳上下可移动的连接于所述第一外壳上,所述动力组件安装于所述第二外壳中并驱动所述全向轮旋转,所述主控单元分别独立控制四个所述动力组件。本设计结构紧凑,安装拆卸方便,对路面的适应性
一种全向移动的医疗移转床.pdf
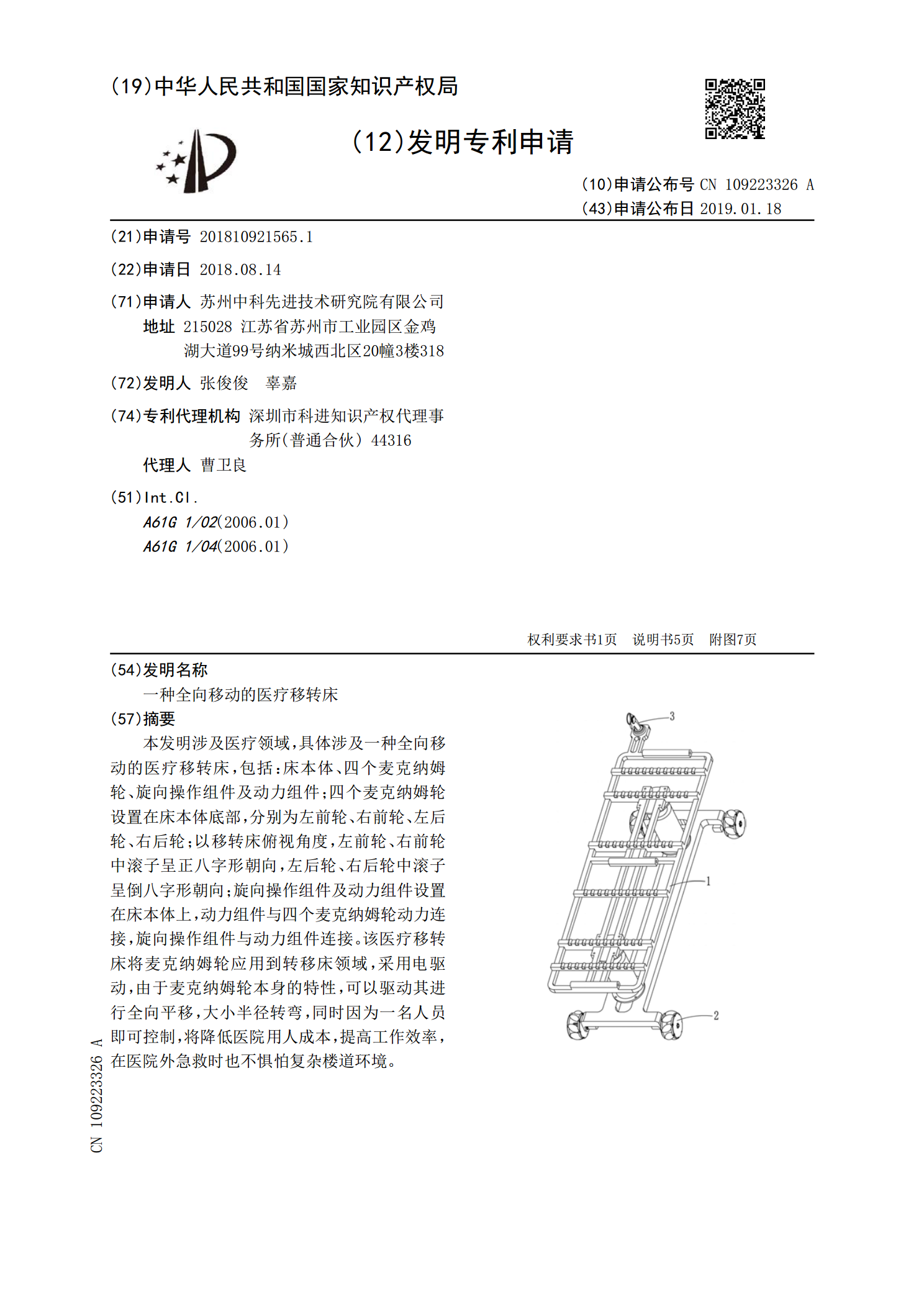
本发明涉及医疗领域,具体涉及一种全向移动的医疗移转床,包括:床本体、四个麦克纳姆轮、旋向操作组件及动力组件;四个麦克纳姆轮设置在床本体底部,分别为左前轮、右前轮、左后轮、右后轮;以移转床俯视角度,左前轮、右前轮中滚子呈正八字形朝向,左后轮、右后轮中滚子呈倒八字形朝向;旋向操作组件及动力组件设置在床本体上,动力组件与四个麦克纳姆轮动力连接,旋向操作组件与动力组件连接。该医疗移转床将麦克纳姆轮应用到转移床领域,采用电驱动,由于麦克纳姆轮本身的特性,可以驱动其进行全向平移,大小半径转弯,同时因为一名人员即可控制