
一种全向移动的医疗移转床.pdf

淑然****by


1/10
2/10

3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种全向移动的医疗移转床.pdf
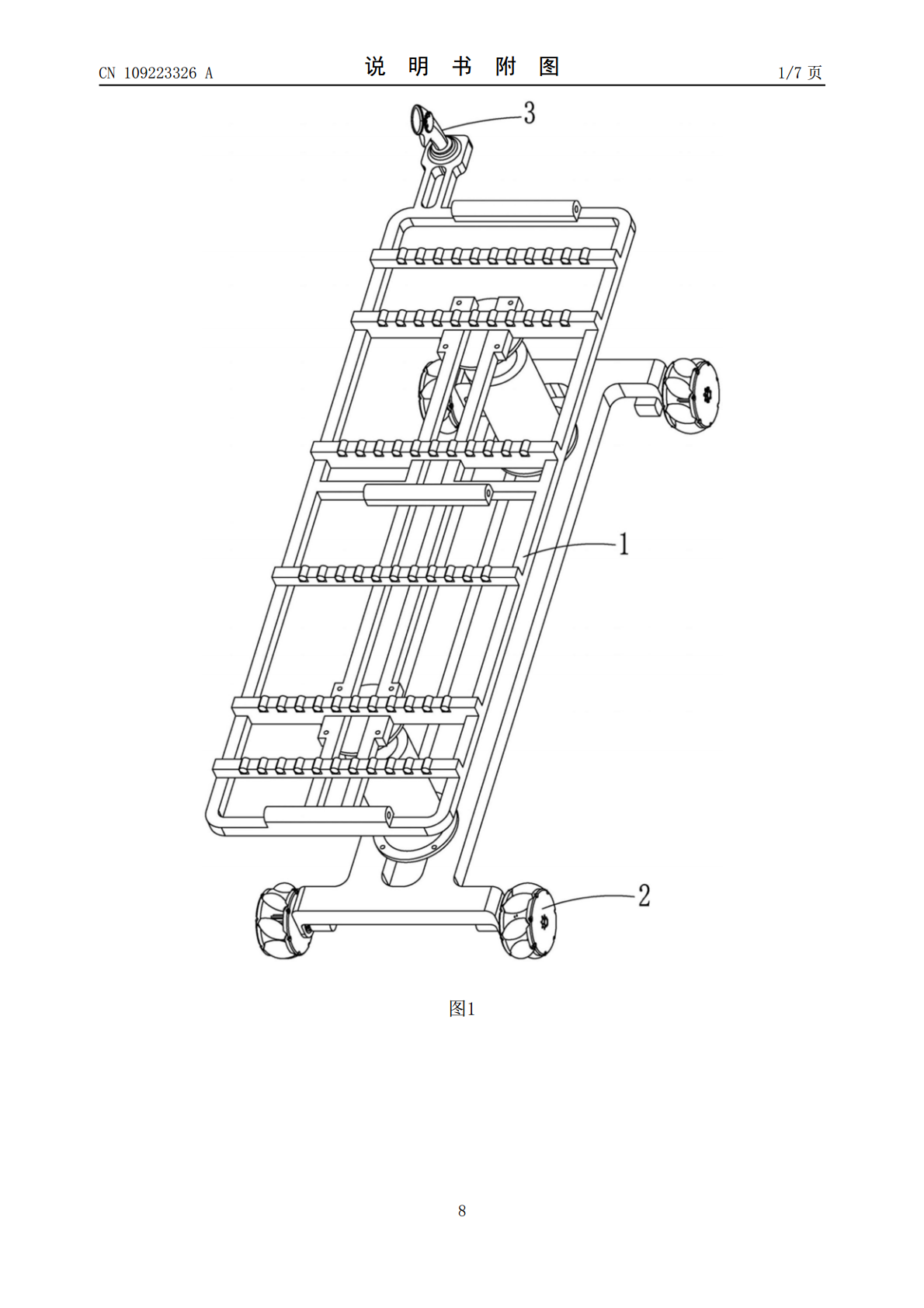
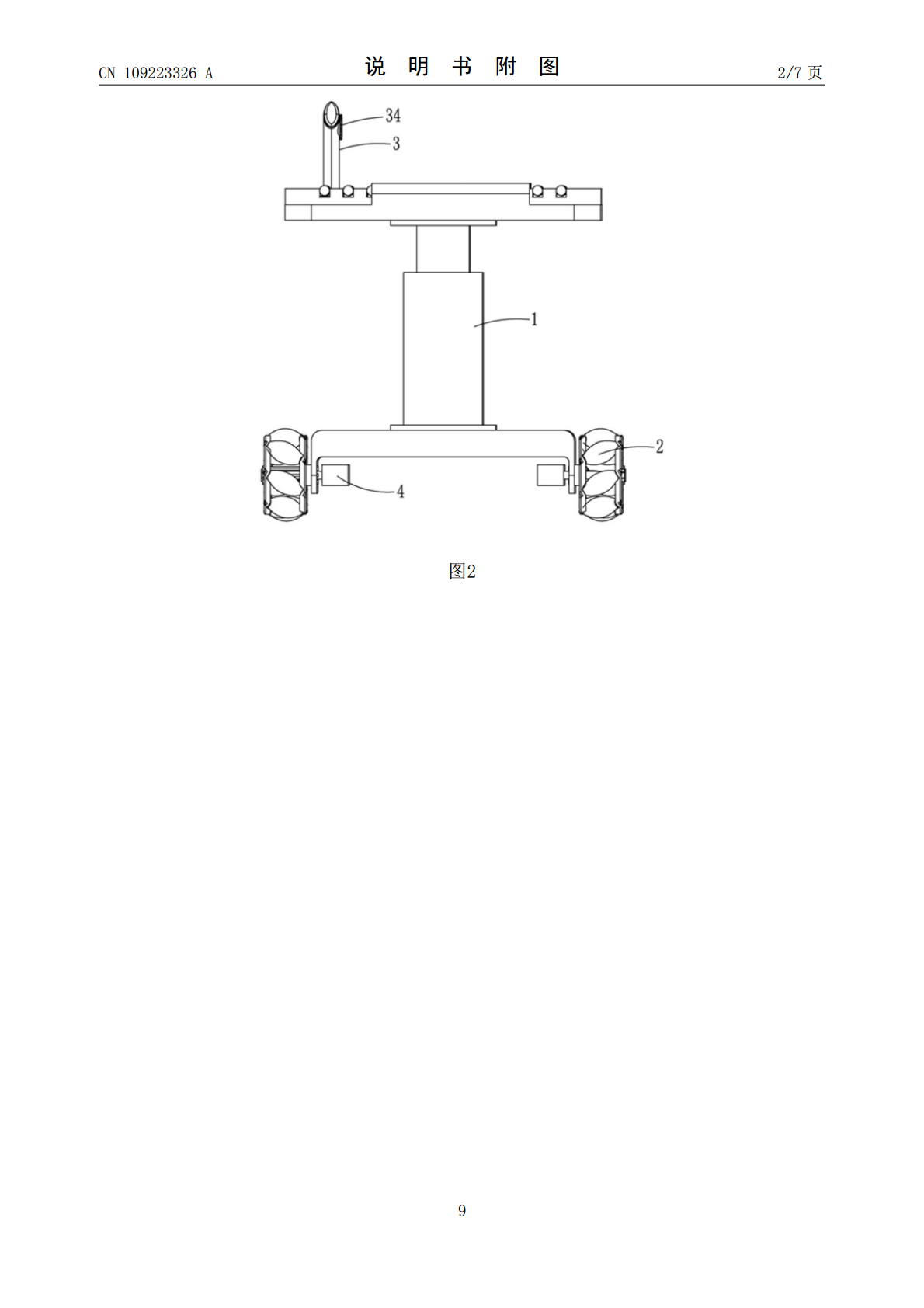
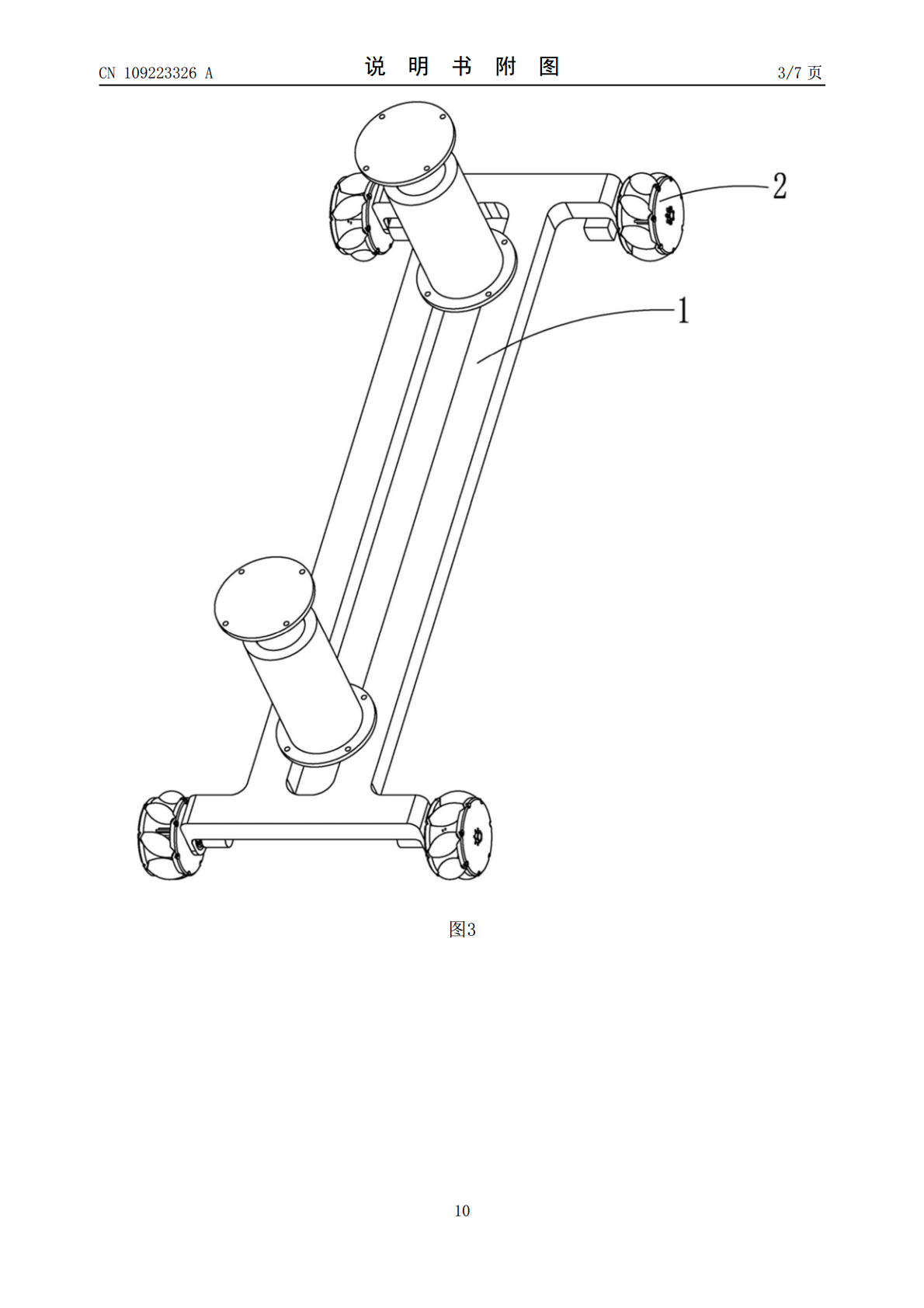
本发明涉及医疗领域,具体涉及一种全向移动的医疗移转床,包括:床本体、四个麦克纳姆轮、旋向操作组件及动力组件;四个麦克纳姆轮设置在床本体底部,分别为左前轮、右前轮、左后轮、右后轮;以移转床俯视角度,左前轮、右前轮中滚子呈正八字形朝向,左后轮、右后轮中滚子呈倒八字形朝向;旋向操作组件及动力组件设置在床本体上,动力组件与四个麦克纳姆轮动力连接,旋向操作组件与动力组件连接。该医疗移转床将麦克纳姆轮应用到转移床领域,采用电驱动,由于麦克纳姆轮本身的特性,可以驱动其进行全向平移,大小半径转弯,同时因为一名人员即可控制

一种全向移动智能轮椅床.pdf
本发明涉及一种全向移动智能轮椅床,基于四轮全方位独立驱动‑转向平台,包括座椅架、两个侧护栏、四组独立悬挂‑转向‑驱动轮组以及底盘。座椅架由背部、臀部、腿部、脚部和侧护栏五部分组成。各个部分均使用电动机驱动,通过推杆电机的往复运动使得床体形态自动转换。安装在底盘上的侧方推杆电机与侧扶手构成三连杆,通过两组线性轨道的过约束,使得侧护栏只能在竖直方向的自由度上运动。独立悬挂‑转向‑驱动轮组由悬挂机构、转向机构和驱动机构组成;悬挂机构通过四连杆机构形变压缩避震器起到避震效果;转向机构将驱动力作用于轮毂电机用于改变
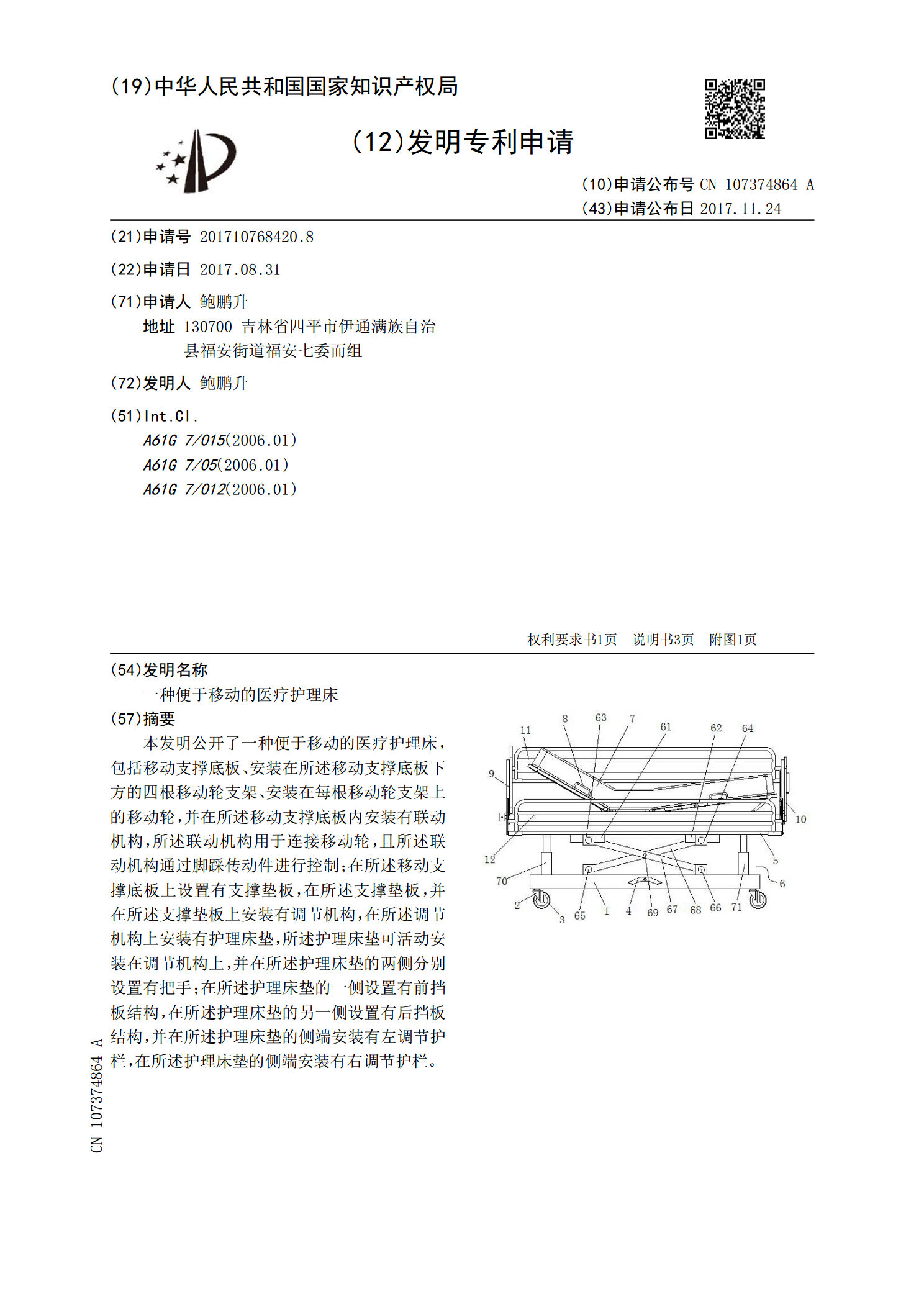
一种便于移动的医疗护理床.pdf
本发明公开了一种便于移动的医疗护理床,包括移动支撑底板、安装在所述移动支撑底板下方的四根移动轮支架、安装在每根移动轮支架上的移动轮,并在所述移动支撑底板内安装有联动机构,所述联动机构用于连接移动轮,且所述联动机构通过脚踩传动件进行控制;在所述移动支撑底板上设置有支撑垫板,在所述支撑垫板,并在所述支撑垫板上安装有调节机构,在所述调节机构上安装有护理床垫,所述护理床垫可活动安装在调节机构上,并在所述护理床垫的两侧分别设置有把手;在所述护理床垫的一侧设置有前挡板结构,在所述护理床垫的另一侧设置有后挡板结构,并在
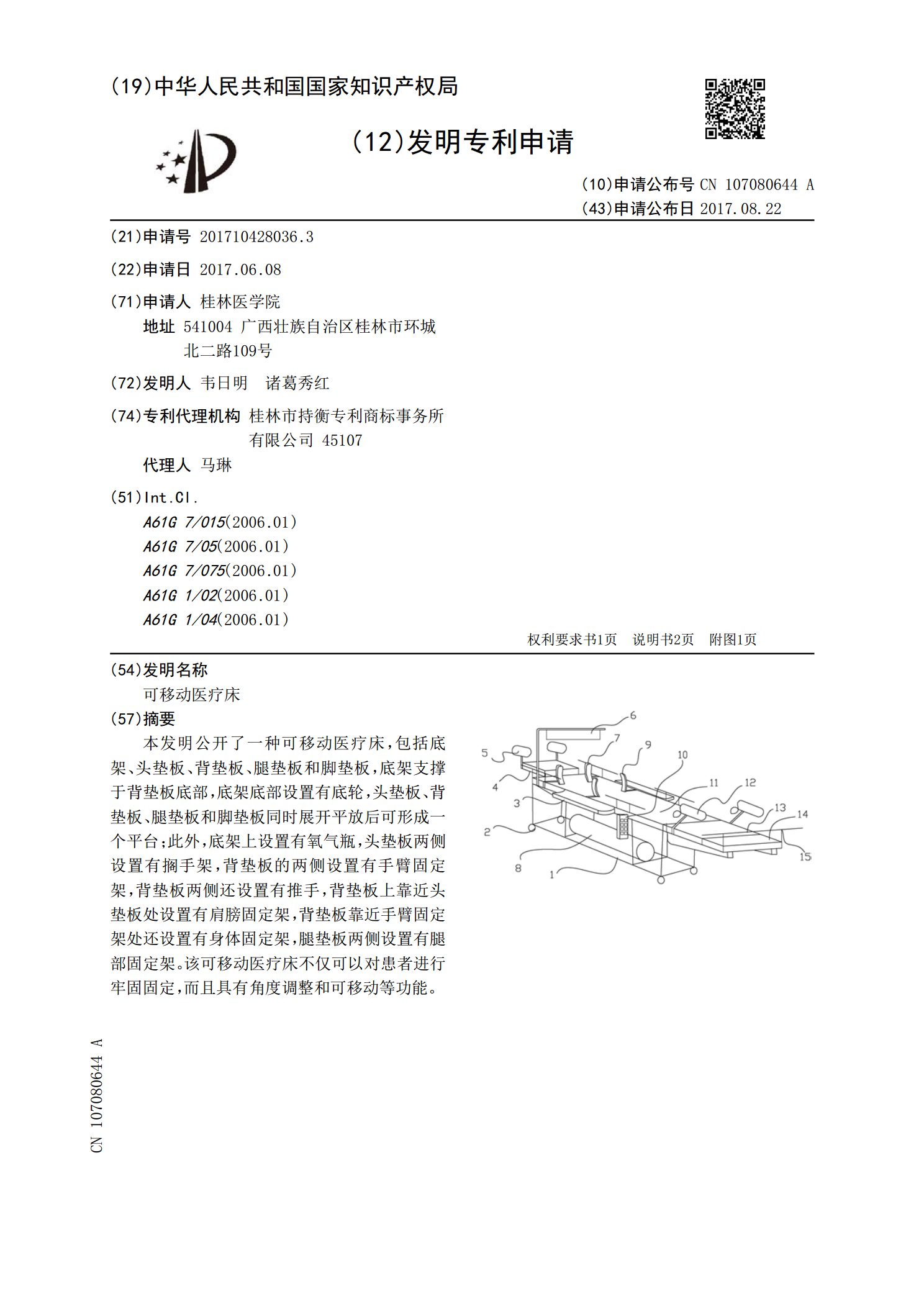
可移动医疗床.pdf
本发明公开了一种可移动医疗床,包括底架、头垫板、背垫板、腿垫板和脚垫板,底架支撑于背垫板底部,底架底部设置有底轮,头垫板、背垫板、腿垫板和脚垫板同时展开平放后可形成一个平台;此外,底架上设置有氧气瓶,头垫板两侧设置有搁手架,背垫板的两侧设置有手臂固定架,背垫板两侧还设置有推手,背垫板上靠近头垫板处设置有肩膀固定架,背垫板靠近手臂固定架处还设置有身体固定架,腿垫板两侧设置有腿部固定架。该可移动医疗床不仅可以对患者进行牢固固定,而且具有角度调整和可移动等功能。
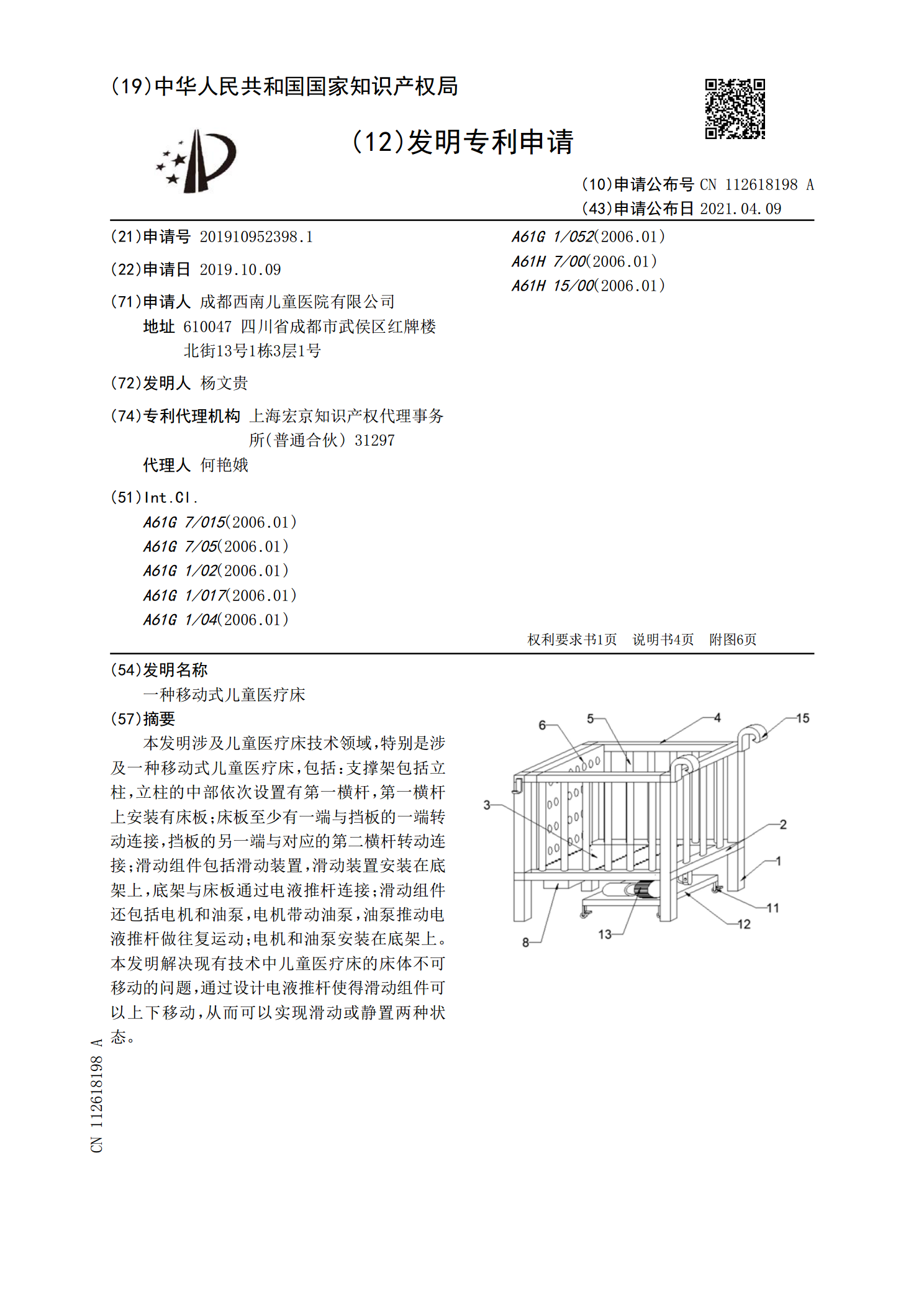
一种移动式儿童医疗床.pdf
本发明涉及儿童医疗床技术领域,特别是涉及一种移动式儿童医疗床,包括:支撑架包括立柱,立柱的中部依次设置有第一横杆,第一横杆上安装有床板;床板至少有一端与挡板的一端转动连接,挡板的另一端与对应的第二横杆转动连接;滑动组件包括滑动装置,滑动装置安装在底架上,底架与床板通过电液推杆连接;滑动组件还包括电机和油泵,电机带动油泵,油泵推动电液推杆做往复运动;电机和油泵安装在底架上。本发明解决现有技术中儿童医疗床的床体不可移动的问题,通过设计电液推杆使得滑动组件可以上下移动,从而可以实现滑动或静置两种状态。