
全向多功能轮椅床.pdf

小宏****aa


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共32页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
全向多功能轮椅床.pdf
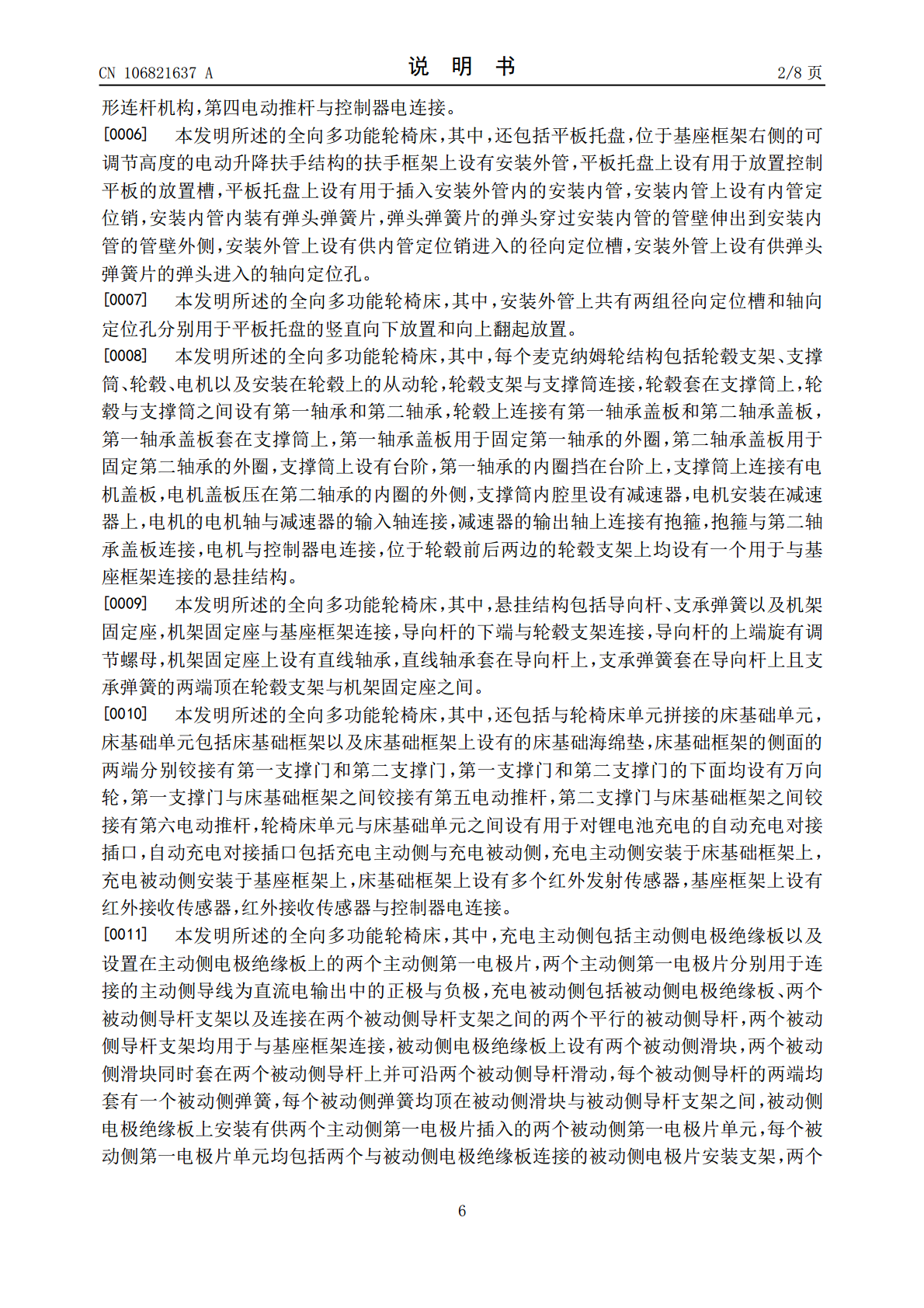
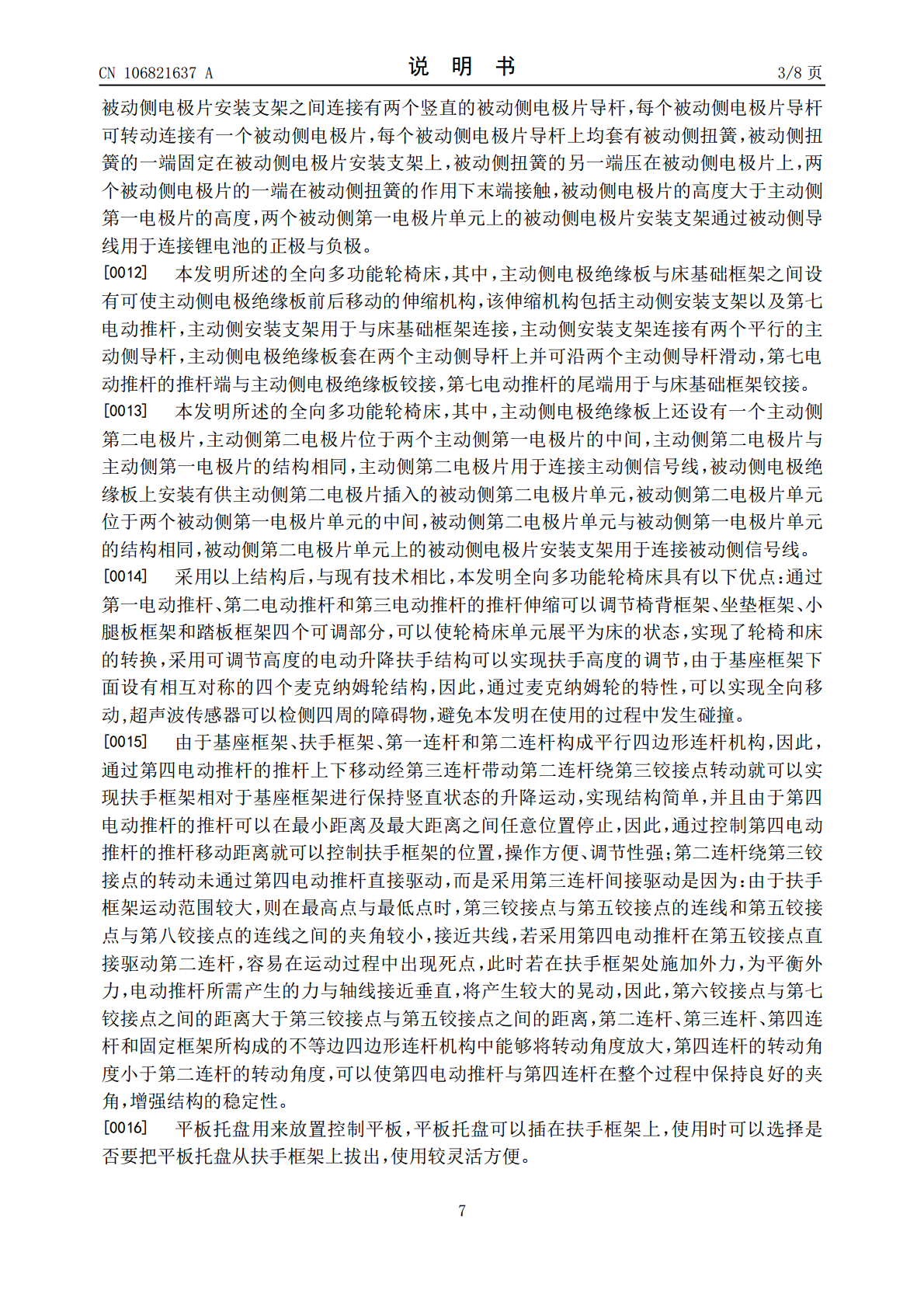
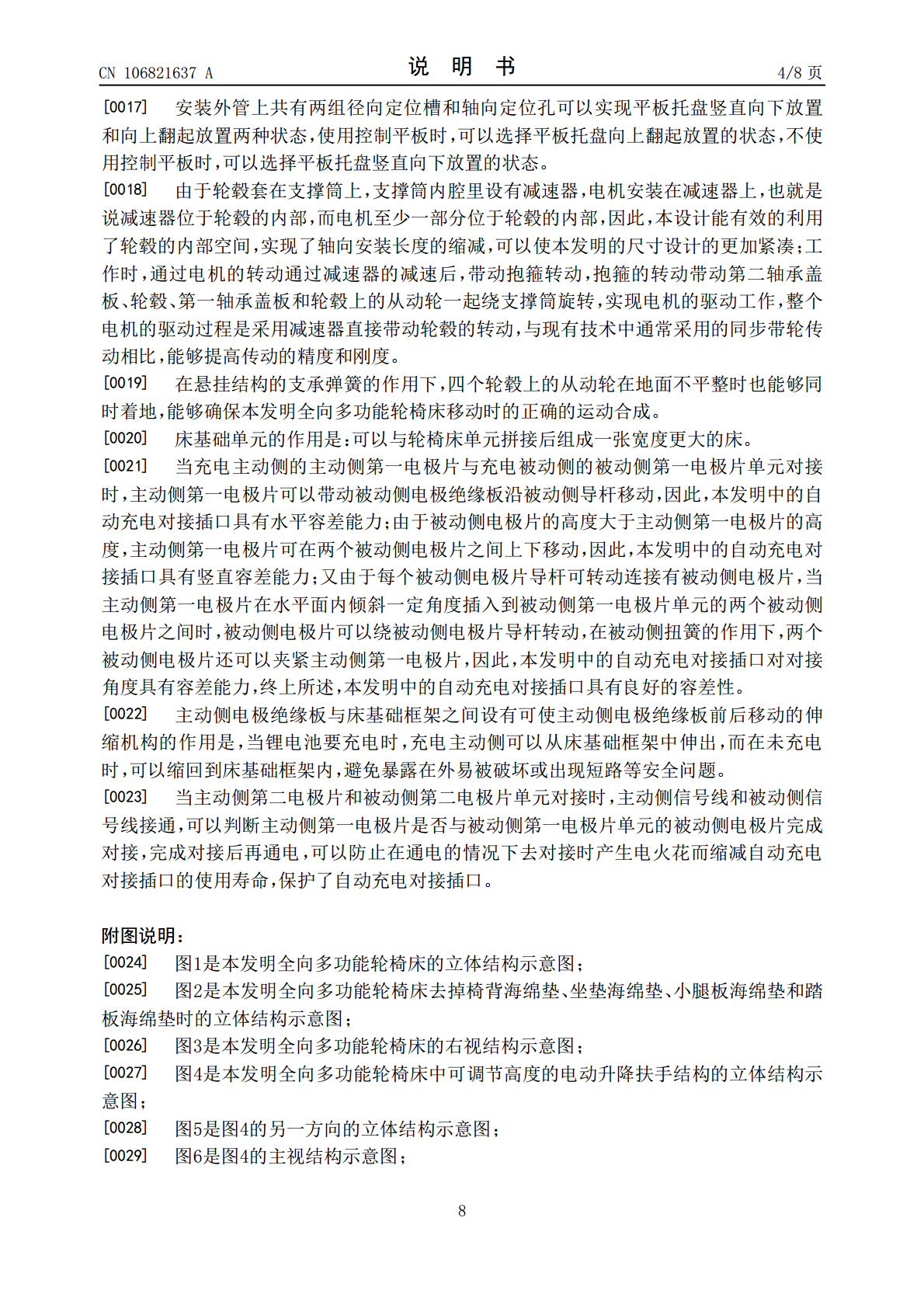
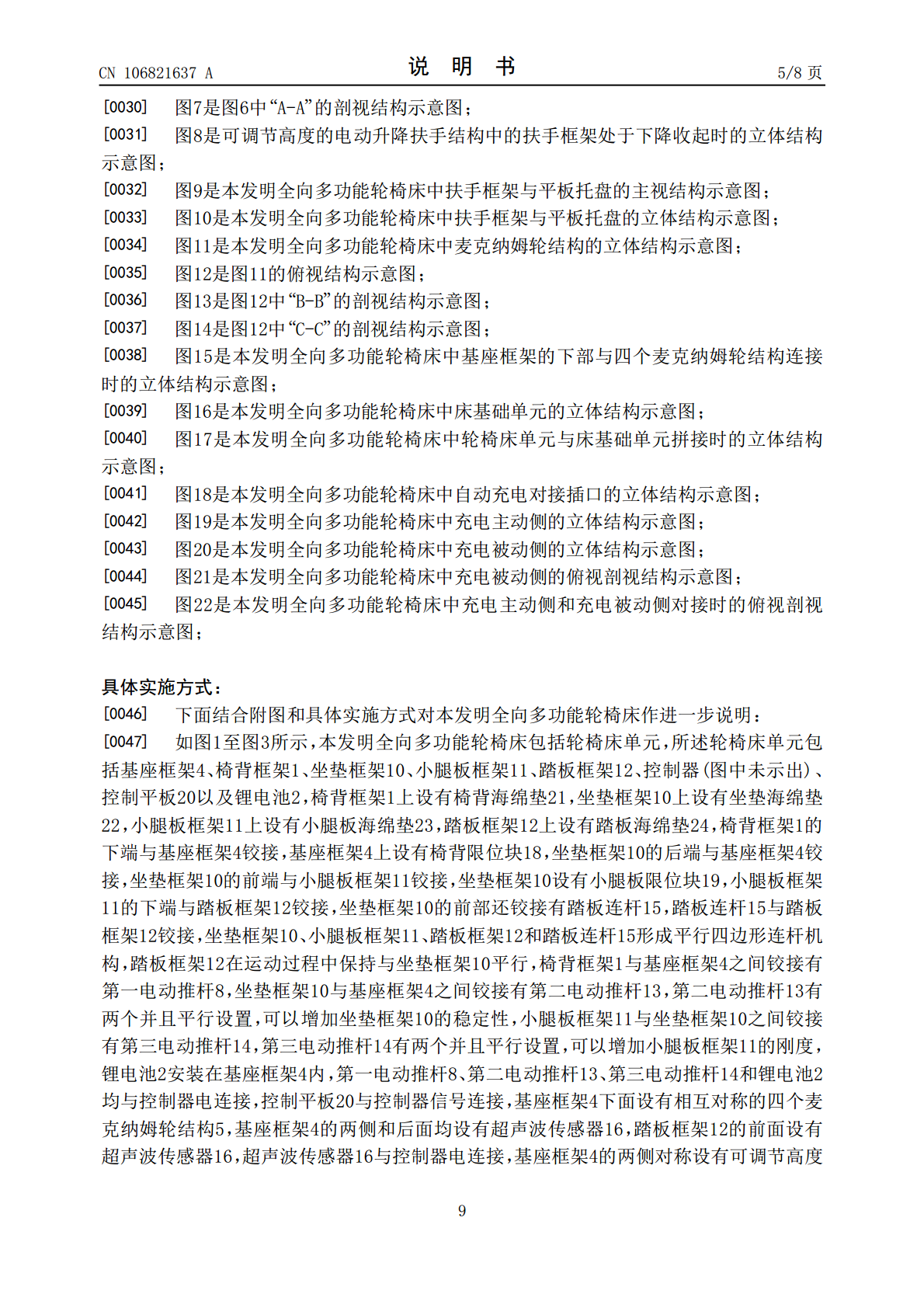
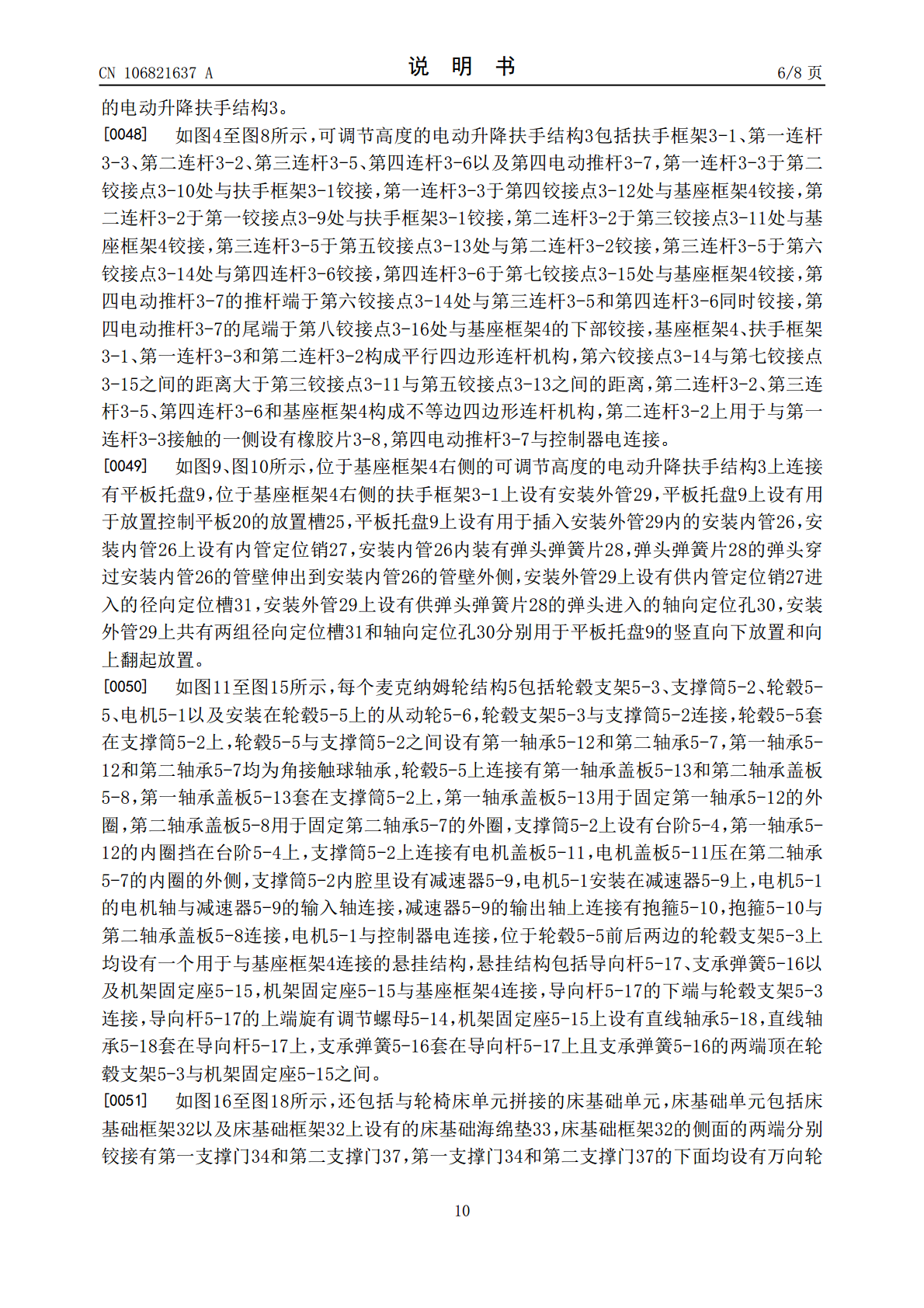
一种全向多功能轮椅床,属于一种轮椅床,包括基座框架、椅背框架、坐垫框架、小腿板框架、踏板框架以及锂电池,椅背框架的下端与基座框架铰接,坐垫框架的后端与基座框架铰接,坐垫框架与小腿板框架铰接,小腿板框架与踏板框架铰接,坐垫框架的前部还铰接有踏板连杆,踏板连杆与踏板框架铰接,椅背框架与基座框架之间铰接有第一电动推杆,坐垫框架与基座框架之间铰接有第二电动推杆,小腿板框架与坐垫框架之间铰接有第三电动推杆,锂电池安装在基座框架内,基座框架下面设有相互对称的四个麦克纳姆轮结构,基座框架的两侧对称设有可调节高度的电动升
多功能轮椅和轮椅床.pdf
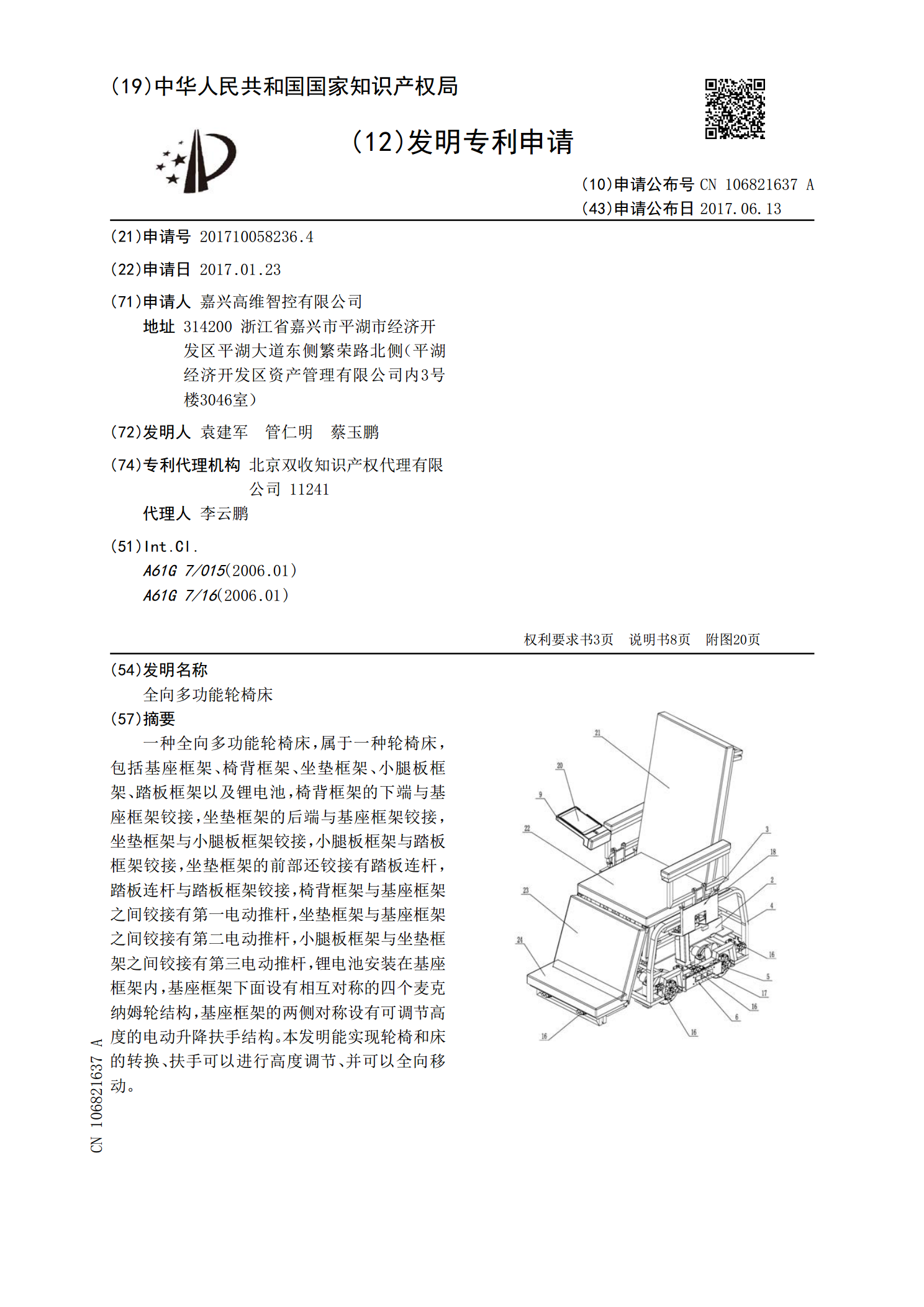
本发明涉及一种多功能轮椅和轮椅床。其中,该多功能轮椅包括:座部支撑架,底部设有行走机构;小腿板支撑架,一端与座部支撑架可转动连接;第一驱动机构,驱动小腿板支撑架相对座部支撑架转动;以及联动机构,包括抬升连杆和滑接座,滑接座设有条形槽,抬升连杆的一端与小腿板支撑架铰接,抬升连杆的中部与座部支撑架铰接,抬升连杆的另一端可滑动地连接于条形槽内,滑接座远离抬升连杆的一端与座部支撑架铰接,滑接座的顶部可用于支撑大腿板,滑接座可随小腿板支撑架的抬升而下降,并随小腿板支撑架的下降而抬升。本发明的多功能轮椅可实现小腿板与
多功能轮椅床.pdf
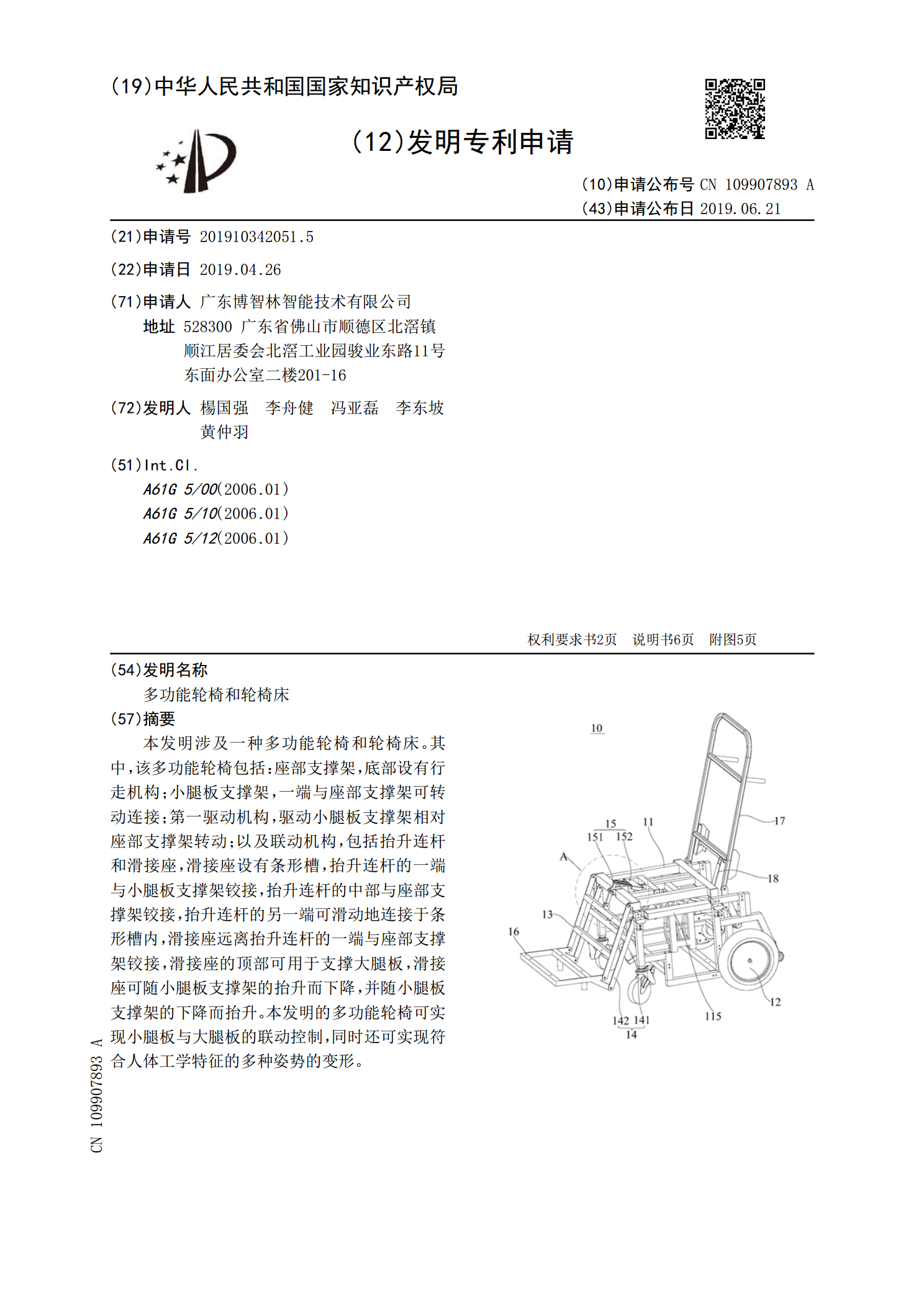
本发明公开了一种多功能轮椅床,包括:床体组件及可拆卸连接在所述床体组件上的轮椅组件;所述轮椅组件包括轮椅框架、设置在所述轮椅框架的臀板、与所述臀板的第一端铰接的背板、与所述臀板的第二端铰接的大腿板、设置在所述轮椅框架上的推杆组件以及设置在所述臀板下方的两便功能组件。本发明的多功能轮椅床,轮椅组件与床体组件可分离,实现了护理床的基本功能之外,又实现了轮椅功能,减少了使用者在床与轮椅之间的转运过程;本发明实现了体位的自动调整,通过推杆组件配合臀板、背板、大腿板等,能实现坐躺、下肢屈伸、前后俯仰、侧翻身、下肢起
多功能轮椅床.pdf
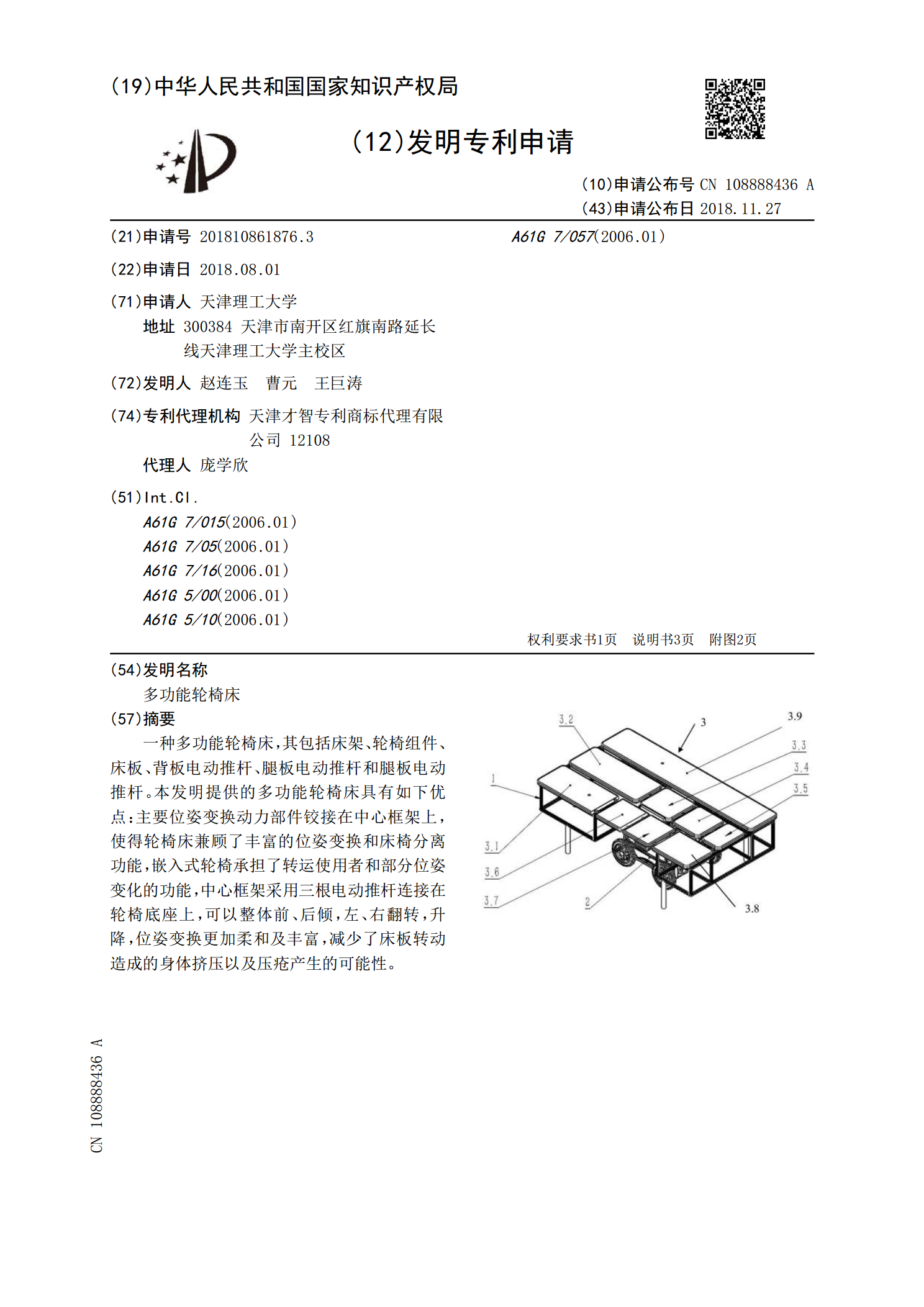
一种多功能轮椅床,其包括床架、轮椅组件、床板、背板电动推杆、腿板电动推杆和腿板电动推杆。本发明提供的多功能轮椅床具有如下优点:主要位姿变换动力部件铰接在中心框架上,使得轮椅床兼顾了丰富的位姿变换和床椅分离功能,嵌入式轮椅承担了转运使用者和部分位姿变化的功能,中心框架采用三根电动推杆连接在轮椅底座上,可以整体前、后倾,左、右翻转,升降,位姿变换更加柔和及丰富,减少了床板转动造成的身体挤压以及压疮产生的可能性。
多功能轮椅床.pdf
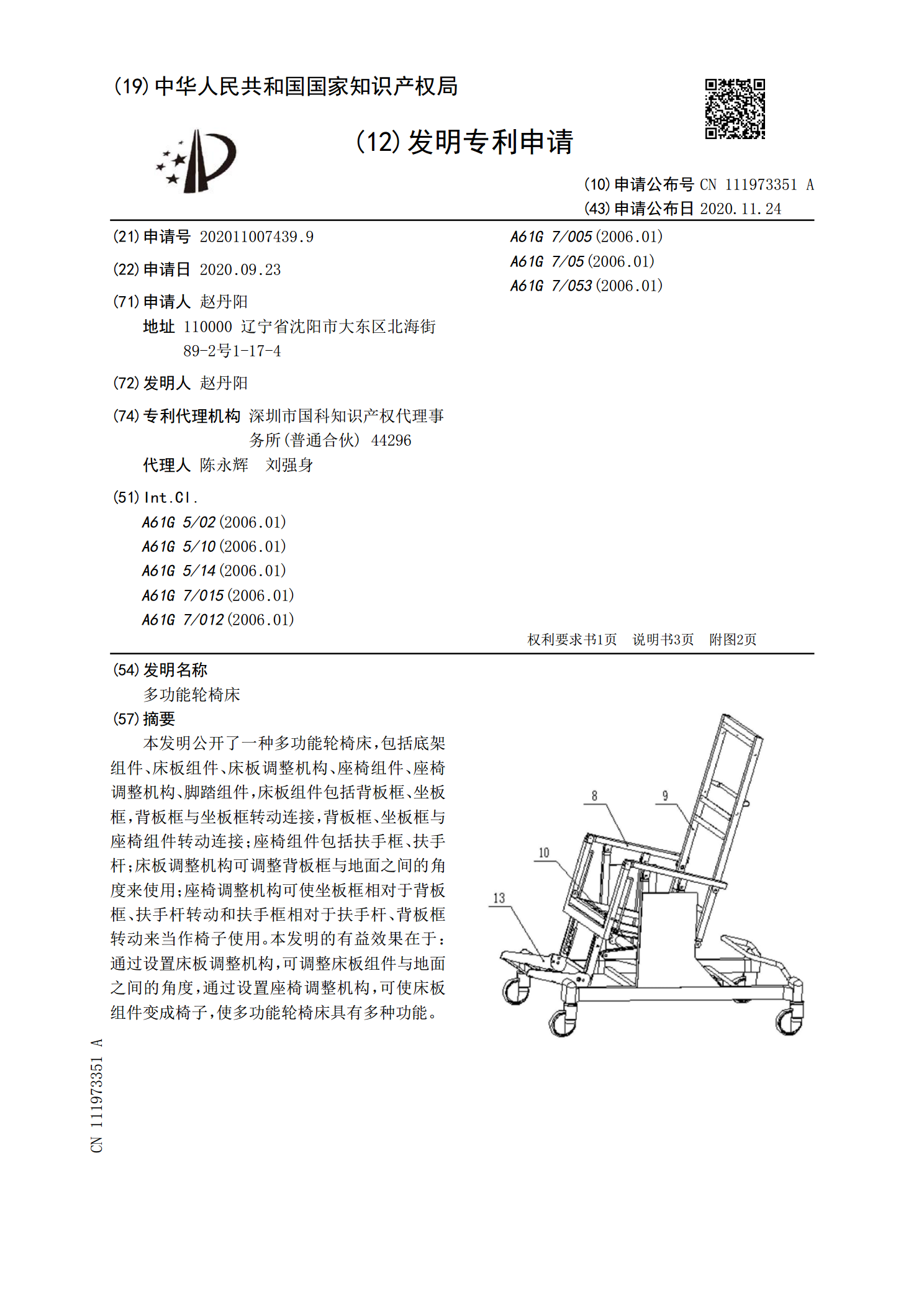
本发明公开了一种多功能轮椅床,包括底架组件、床板组件、床板调整机构、座椅组件、座椅调整机构、脚踏组件,床板组件包括背板框、坐板框,背板框与坐板框转动连接,背板框、坐板框与座椅组件转动连接;座椅组件包括扶手框、扶手杆;床板调整机构可调整背板框与地面之间的角度来使用;座椅调整机构可使坐板框相对于背板框、扶手杆转动和扶手框相对于扶手杆、背板框转动来当作椅子使用。本发明的有益效果在于:通过设置床板调整机构,可调整床板组件与地面之间的角度,通过设置座椅调整机构,可使床板组件变成椅子,使多功能轮椅床具有多种功能。