
全向智能电动轮椅.pdf

一条****ee


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

全向智能电动轮椅.pdf
本发明公开了一种全向智能电动轮椅,包括底盘框架、座椅,底盘框架下方两侧分别铰接有左右相对应的驱动臂,驱动臂上连接有构成一对前轮和一对后轮的麦克纳姆轮,座椅下方两侧、座椅前方且位于一对前轮上方分别设有超声波传感器,麦克纳姆轮的外侧分别设有红外传感器,座椅的扶手上设有控制盒和操作手柄,驱动臂内还设有驱动控制板,驱动控制板线路连接有DSP处理器。本发明与常规的两轮后驱电动轮椅相比,具有如横向、斜向等全向移动能力,具有更大的运动灵活性,通过超声波传感器和红外传感器检测轮椅周围的环境,以此为乘坐者提供可能阻碍轮椅运

全向电动轮椅.pdf
一种室内型电动轮椅。不同于现有整体式固定轴电动轮椅,全向电动轮椅采用分离式活动轴铰接传动构造,以转椅的底盘和升降轴为联接装置,把六足钢管椅和智能驱动的轮毂式电机联接起来,将电动轮的水平牵引力传递给底座上的六只万向脚轮,两只独立操控的电动轮能以升降轴为中心360度任意度原位转向,轮椅全方位移动时无须骨架转向,骨架转向时也无须移动整体轮椅,高度可调的椅座和六角型椅圈设计符合人体工程学原理,六方柱型框架结构稳定性和通过性一流,折叠尺寸小易于携带运输。简单的几何外形极富视觉美感蕴含人文内涵,是传统经典椅具与现代精
智能电动轮椅.pdf
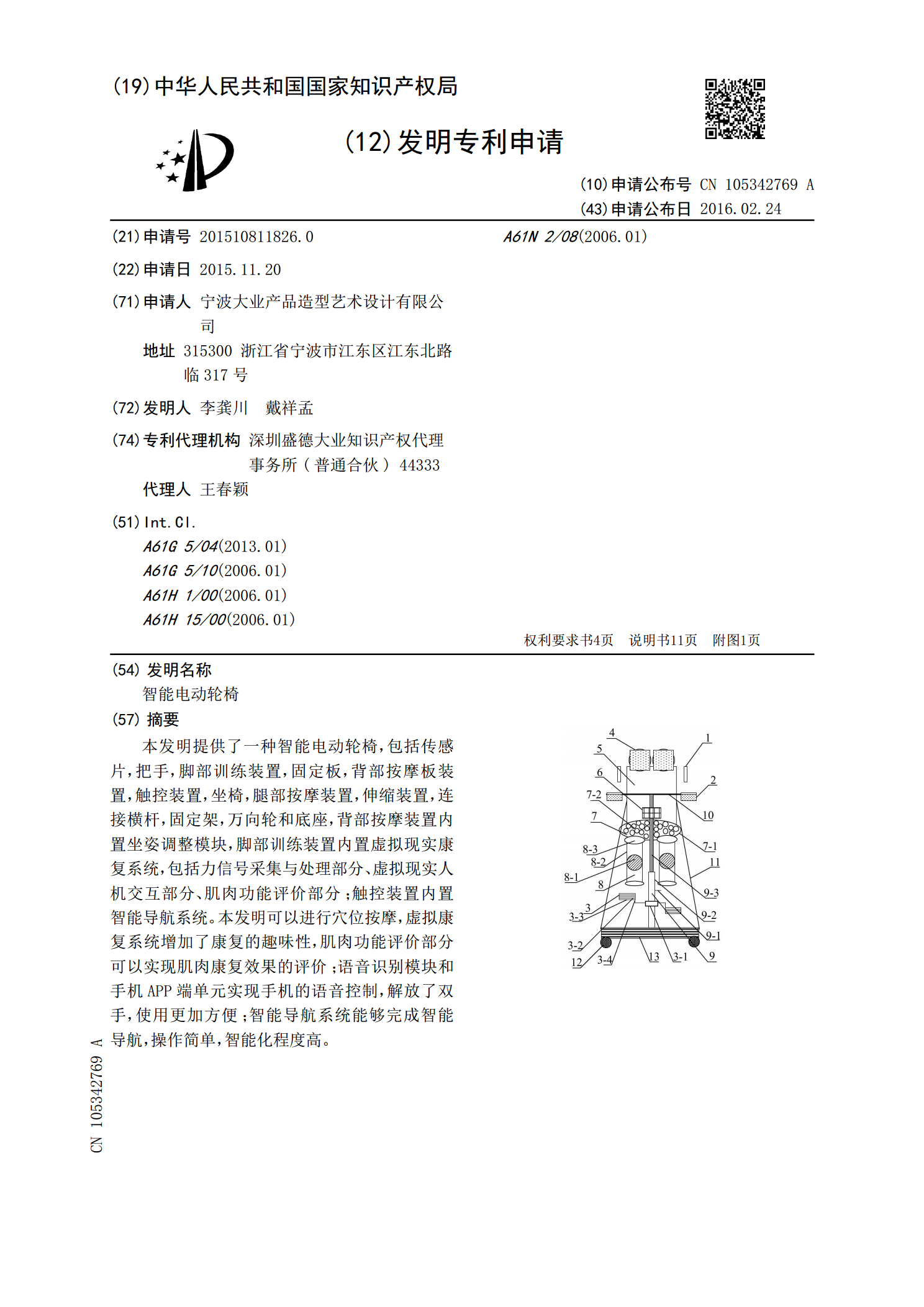
本发明提供了一种智能电动轮椅,包括传感片,把手,脚部训练装置,固定板,背部按摩板装置,触控装置,坐椅,腿部按摩装置,伸缩装置,连接横杆,固定架,万向轮和底座,背部按摩装置内置坐姿调整模块,脚部训练装置内置虚拟现实康复系统,包括力信号采集与处理部分、虚拟现实人机交互部分、肌肉功能评价部分;触控装置内置智能导航系统。本发明可以进行穴位按摩,虚拟康复系统增加了康复的趣味性,肌肉功能评价部分可以实现肌肉康复效果的评价;语音识别模块和手机APP端单元实现手机的语音控制,解放了双手,使用更加方便;智能导航系统能够完成

一种全向移动智能轮椅床.pdf
本发明涉及一种全向移动智能轮椅床,基于四轮全方位独立驱动‑转向平台,包括座椅架、两个侧护栏、四组独立悬挂‑转向‑驱动轮组以及底盘。座椅架由背部、臀部、腿部、脚部和侧护栏五部分组成。各个部分均使用电动机驱动,通过推杆电机的往复运动使得床体形态自动转换。安装在底盘上的侧方推杆电机与侧扶手构成三连杆,通过两组线性轨道的过约束,使得侧护栏只能在竖直方向的自由度上运动。独立悬挂‑转向‑驱动轮组由悬挂机构、转向机构和驱动机构组成;悬挂机构通过四连杆机构形变压缩避震器起到避震效果;转向机构将驱动力作用于轮毂电机用于改变
共享智能电动助力轮椅系统.pdf
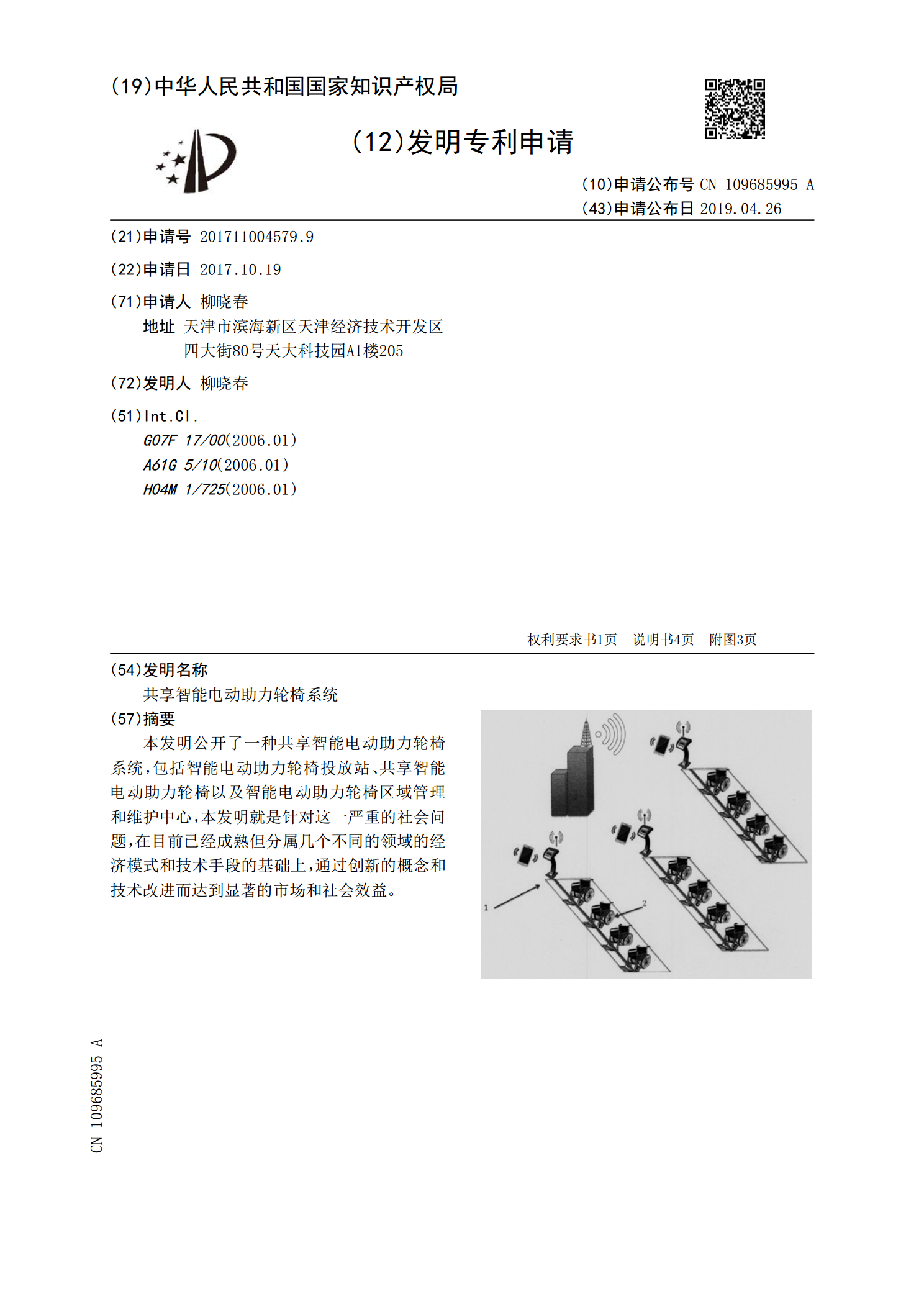
本发明公开了一种共享智能电动助力轮椅系统,包括智能电动助力轮椅投放站、共享智能电动助力轮椅以及智能电动助力轮椅区域管理和维护中心,本发明就是针对这一严重的社会问题,在目前已经成熟但分属几个不同的领域的经济模式和技术手段的基础上,通过创新的概念和技术改进而达到显著的市场和社会效益。