
行驶设备、行驶设备的控制方法及存储介质.pdf

运升****魔王

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
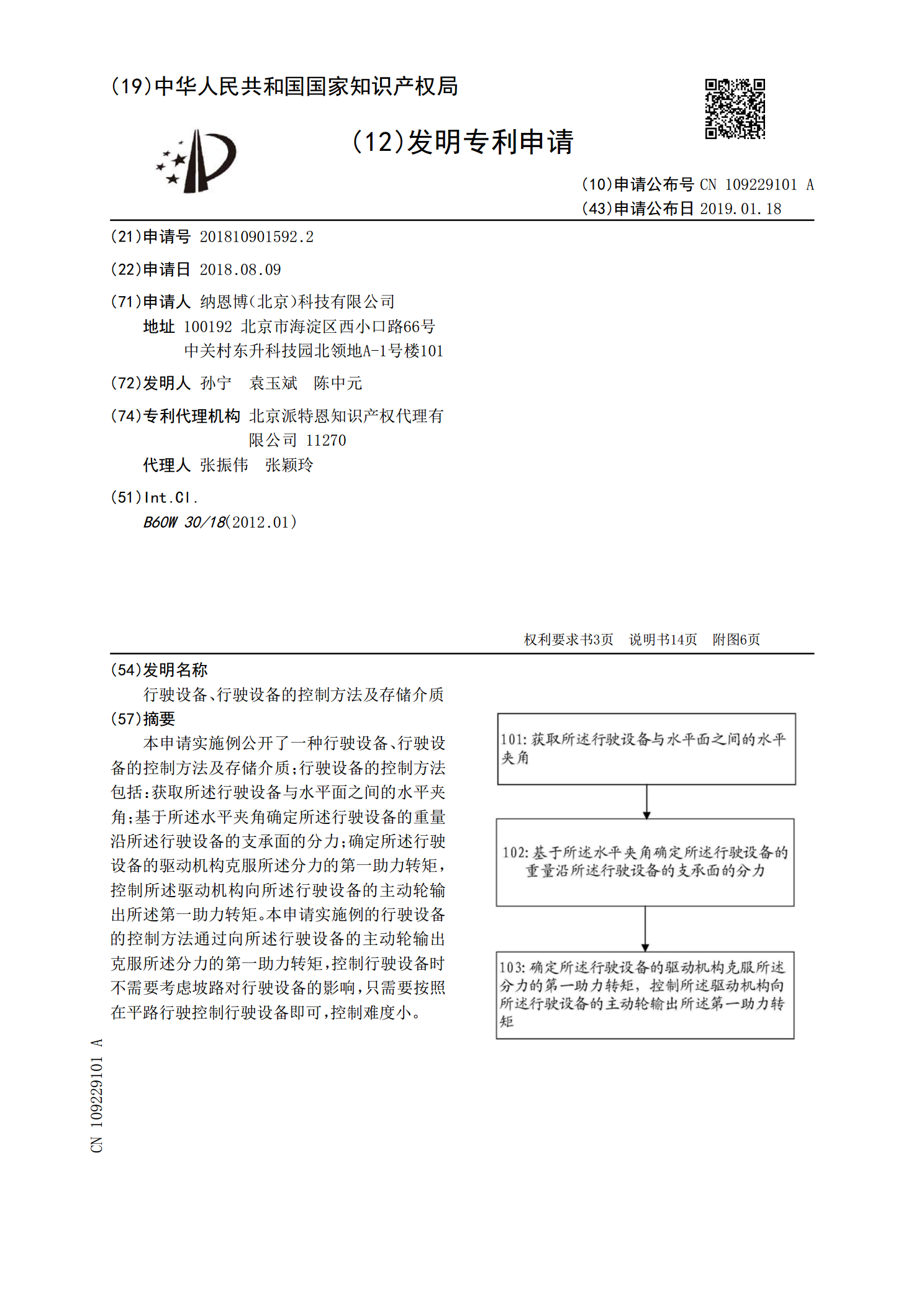
行驶设备、行驶设备的控制方法及存储介质.pdf
本申请实施例公开了一种行驶设备、行驶设备的控制方法及存储介质;行驶设备的控制方法包括:获取所述行驶设备与水平面之间的水平夹角;基于所述水平夹角确定所述行驶设备的重量沿所述行驶设备的支承面的分力;确定所述行驶设备的驱动机构克服所述分力的第一助力转矩,控制所述驱动机构向所述行驶设备的主动轮输出所述第一助力转矩。本申请实施例的行驶设备的控制方法通过向所述行驶设备的主动轮输出克服所述分力的第一助力转矩,控制行驶设备时不需要考虑坡路对行驶设备的影响,只需要按照在平路行驶控制行驶设备即可,控制难度小。
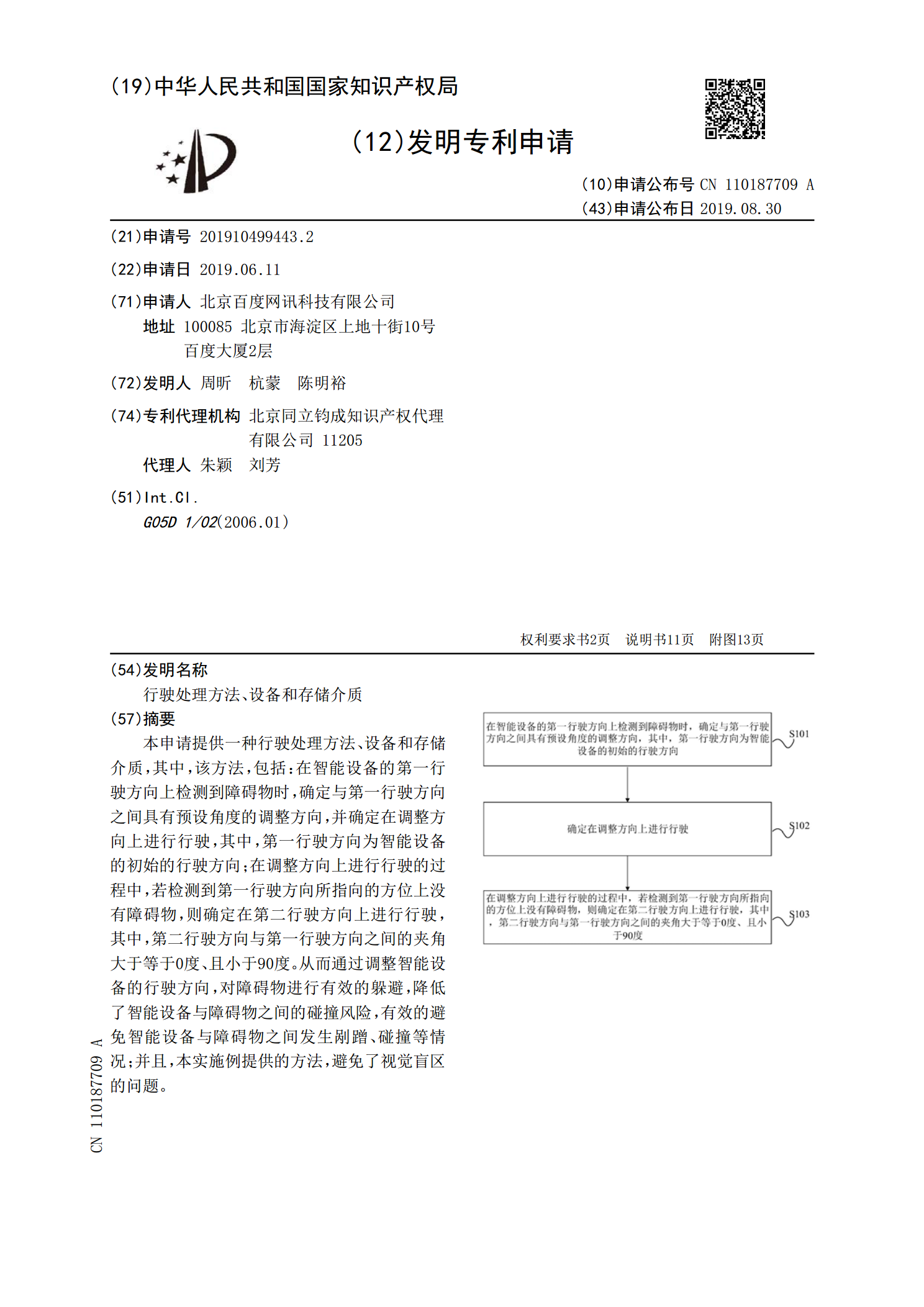
行驶处理方法、设备和存储介质.pdf
本申请提供一种行驶处理方法、设备和存储介质,其中,该方法,包括:在智能设备的第一行驶方向上检测到障碍物时,确定与第一行驶方向之间具有预设角度的调整方向,并确定在调整方向上进行行驶,其中,第一行驶方向为智能设备的初始的行驶方向;在调整方向上进行行驶的过程中,若检测到第一行驶方向所指向的方位上没有障碍物,则确定在第二行驶方向上进行行驶,其中,第二行驶方向与第一行驶方向之间的夹角大于等于0度、且小于90度。从而通过调整智能设备的行驶方向,对障碍物进行有效的躲避,降低了智能设备与障碍物之间的碰撞风险,有效的避免智
行驶设备控制方法、装置、电子设备及存储介质.pdf
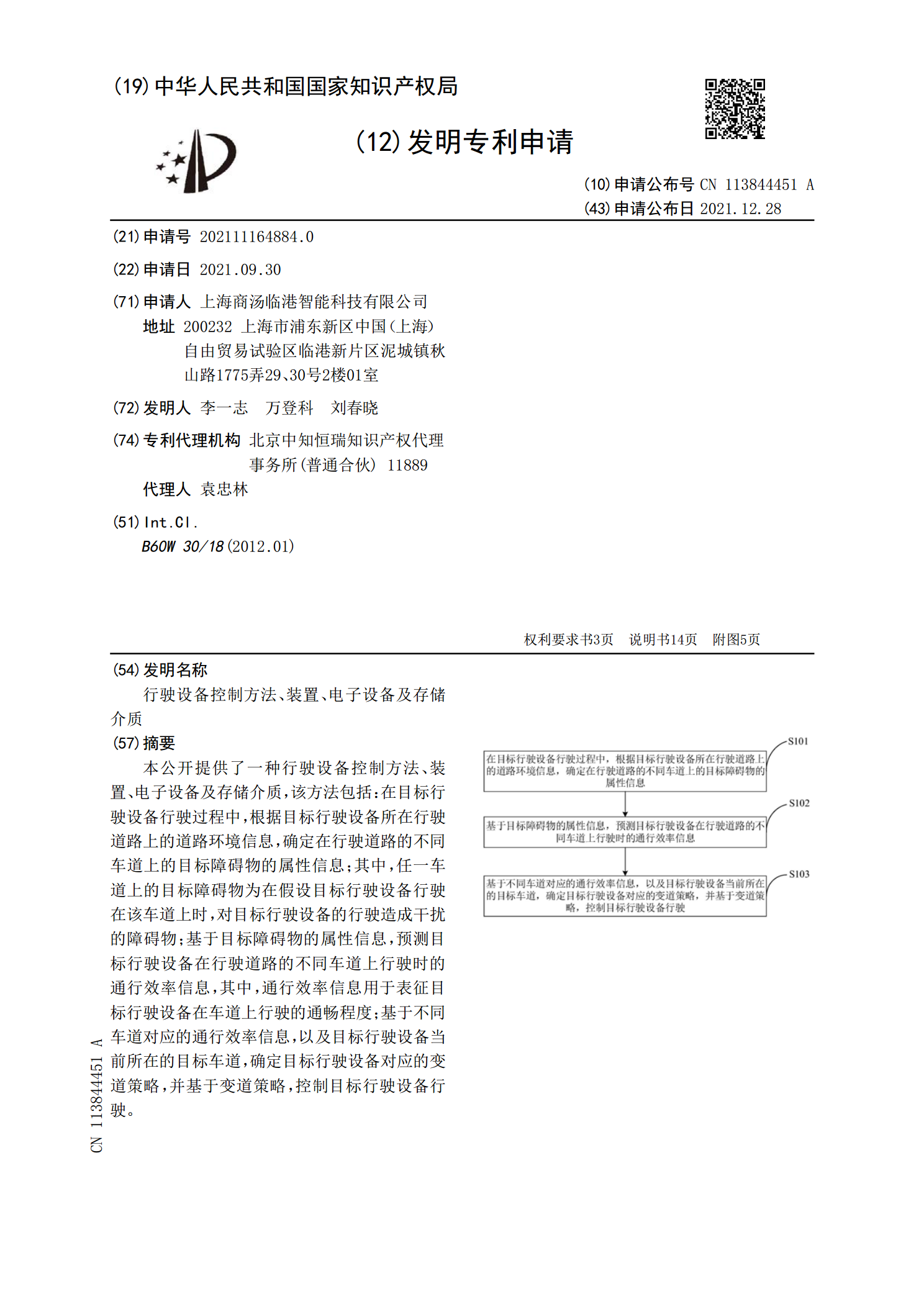
本公开提供了一种行驶设备控制方法、装置、电子设备及存储介质,该方法包括:在目标行驶设备行驶过程中,根据目标行驶设备所在行驶道路上的道路环境信息,确定在行驶道路的不同车道上的目标障碍物的属性信息;其中,任一车道上的目标障碍物为在假设目标行驶设备行驶在该车道上时,对目标行驶设备的行驶造成干扰的障碍物;基于目标障碍物的属性信息,预测目标行驶设备在行驶道路的不同车道上行驶时的通行效率信息,其中,通行效率信息用于表征目标行驶设备在车道上行驶的通畅程度;基于不同车道对应的通行效率信息,以及目标行驶设备当前所在的目标车
行驶控制方法、系统、终端设备和存储介质.pdf
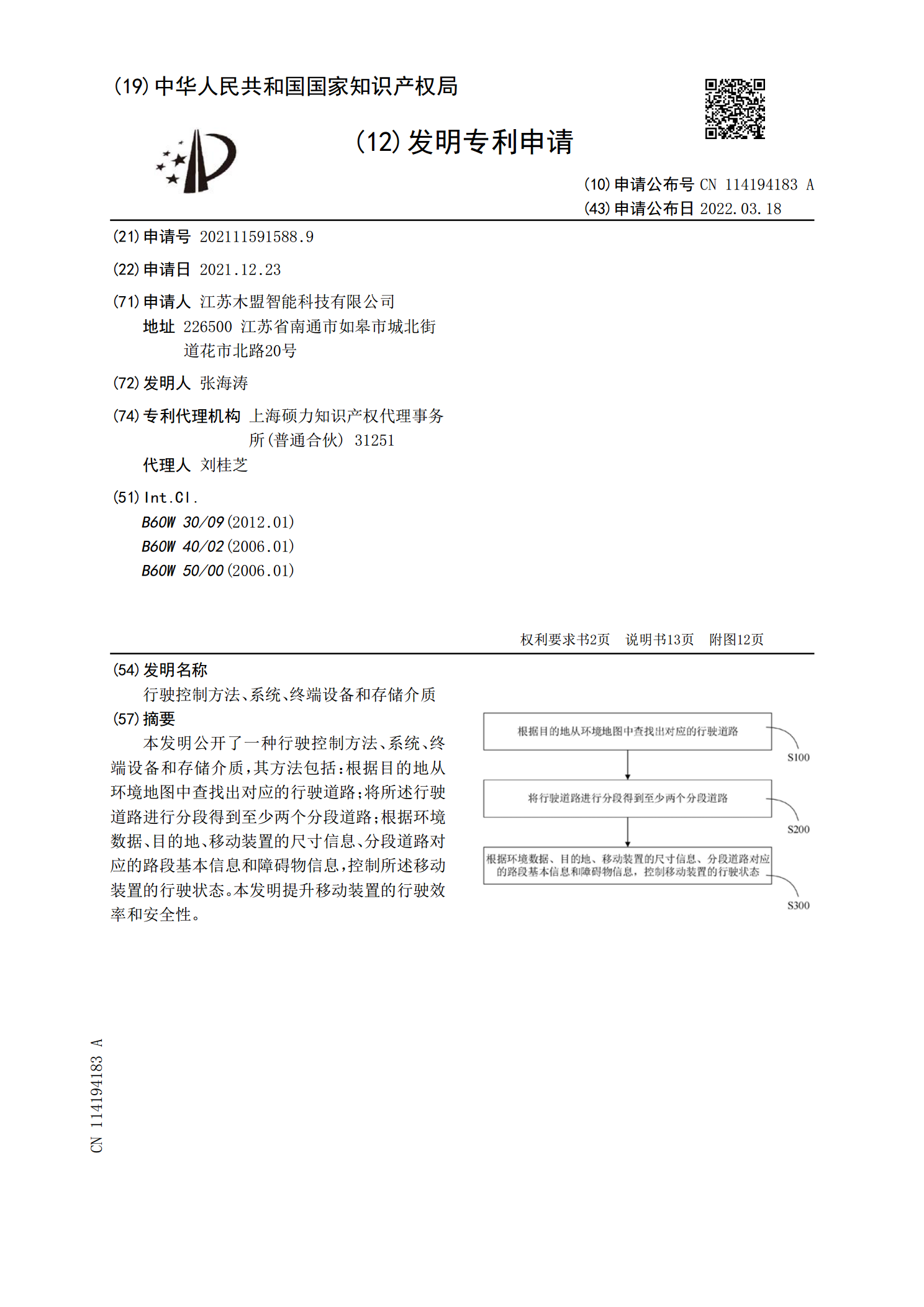
本发明公开了一种行驶控制方法、系统、终端设备和存储介质,其方法包括:根据目的地从环境地图中查找出对应的行驶道路;将所述行驶道路进行分段得到至少两个分段道路;根据环境数据、目的地、移动装置的尺寸信息、分段道路对应的路段基本信息和障碍物信息,控制所述移动装置的行驶状态。本发明提升移动装置的行驶效率和安全性。
车辆行驶提醒方法、装置、设备及存储介质.pdf
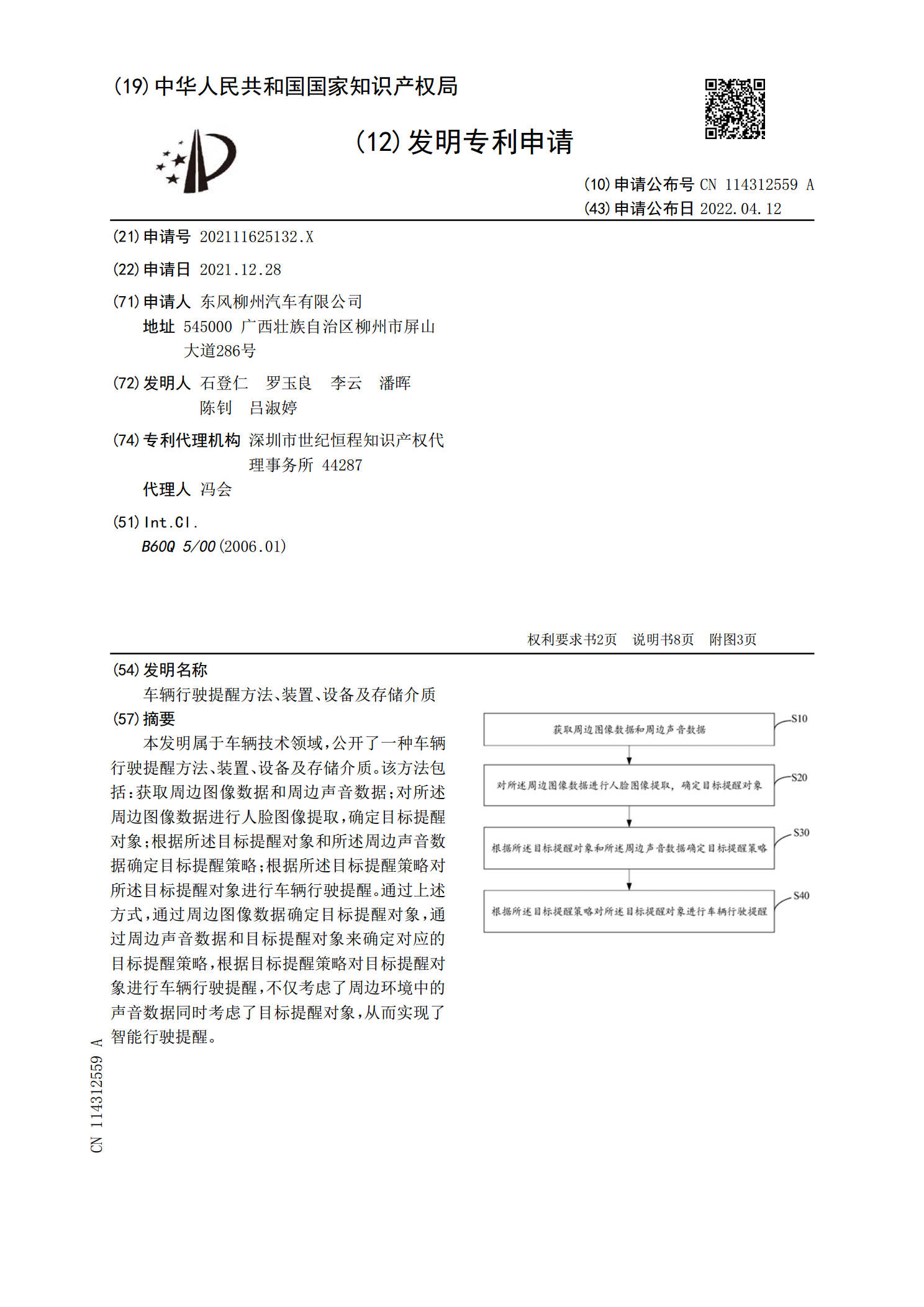
本发明属于车辆技术领域,公开了一种车辆行驶提醒方法、装置、设备及存储介质。该方法包括:获取周边图像数据和周边声音数据;对所述周边图像数据进行人脸图像提取,确定目标提醒对象;根据所述目标提醒对象和所述周边声音数据确定目标提醒策略;根据所述目标提醒策略对所述目标提醒对象进行车辆行驶提醒。通过上述方式,通过周边图像数据确定目标提醒对象,通过周边声音数据和目标提醒对象来确定对应的目标提醒策略,根据目标提醒策略对目标提醒对象进行车辆行驶提醒,不仅考虑了周边环境中的声音数据同时考虑了目标提醒对象,从而实现了智能行驶提