
行驶控制方法、系统、终端设备和存储介质.pdf

兴朝****45

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
行驶控制方法、系统、终端设备和存储介质.pdf
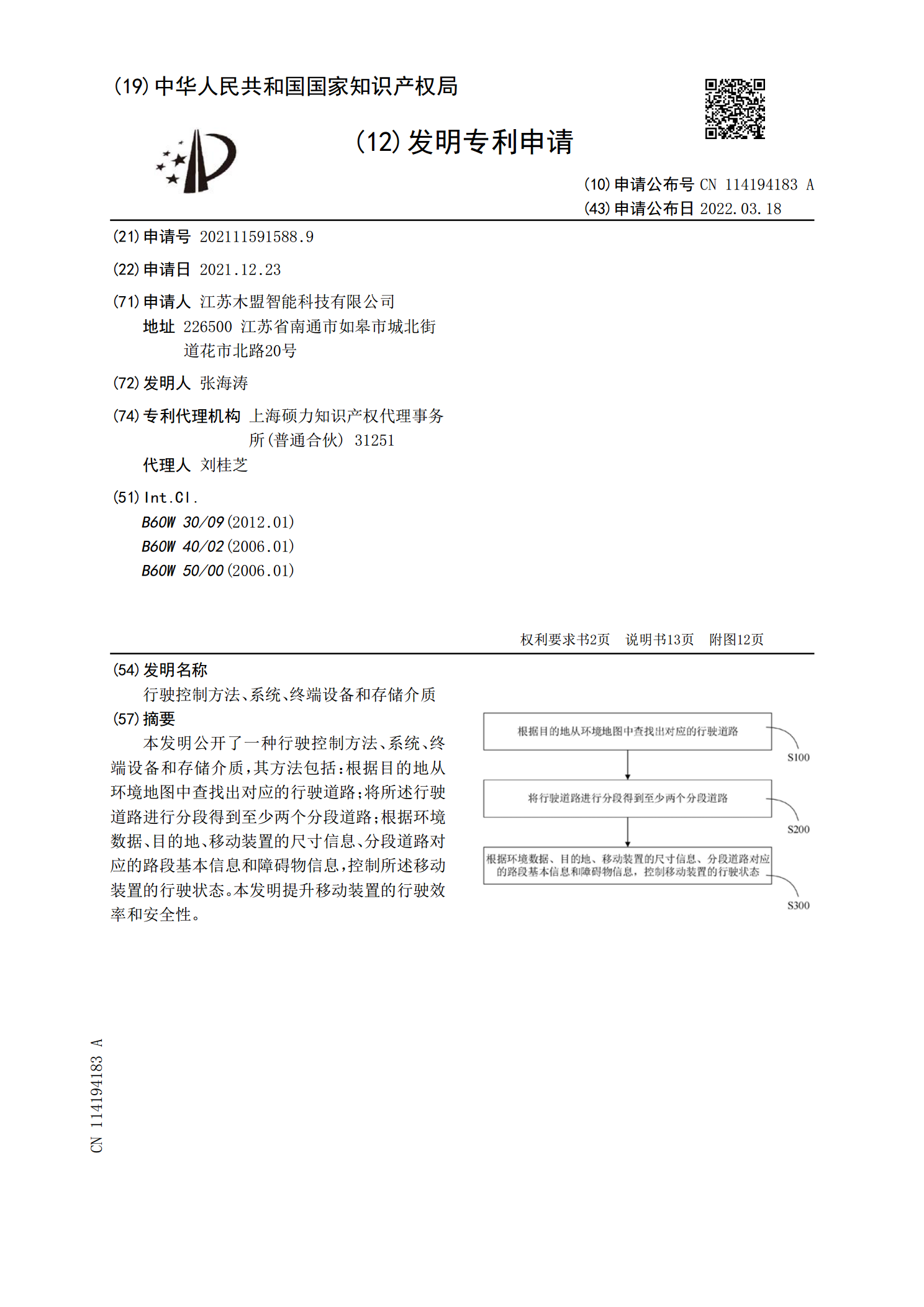
本发明公开了一种行驶控制方法、系统、终端设备和存储介质,其方法包括:根据目的地从环境地图中查找出对应的行驶道路;将所述行驶道路进行分段得到至少两个分段道路;根据环境数据、目的地、移动装置的尺寸信息、分段道路对应的路段基本信息和障碍物信息,控制所述移动装置的行驶状态。本发明提升移动装置的行驶效率和安全性。

终端设备的控制方法、终端设备和存储介质.pdf
本发明提供一种终端设备的控制方法、终端设备和存储介质,控制方法包括:接收应用程序发送的摄像头控制指令;基于所述摄像头控制指令,判断终端设备当前连接的摄像头是否为外接摄像头;若是,获取所述外接摄像头的数据并将所述数据转给所述应用程序。本发明基于应用程序发送的摄像头控制指令,判断终端设备当前连接的摄像头为外接摄像头时,获取外接摄像头的数据并将数据转给应用程序,避免了应用程序自身必须支持外接摄像头才能实现调用外接摄像头功能,实现了终端设备对应用程序调用外接摄像头的支撑功能。

机器人控制方法、系统、终端设备和存储介质.pdf
本发明公开了一种机器人控制方法、系统、终端设备和存储介质,其方法包括:在机器人行驶过程中获取机器人的状态信息和周围的环境信息,并获取所述机器人的当前位置;根据所述环境信息和状态信息,确定所述机器人具有停止行驶需求时,控制所述机器人在所述当前位置停留,并识别所述机器人的停驻类型;根据所述停驻类型采用对应的提示机制进行报警,以提示对应人员解除所述机器人的停驻状态。本发明根据机器人当前的环境信息和状态信息进行有效的停驻控制和报警,以使得机器人安全、及时、高效移动以完成待执行任务。
分层控制方法、系统、终端设备及存储介质.pdf
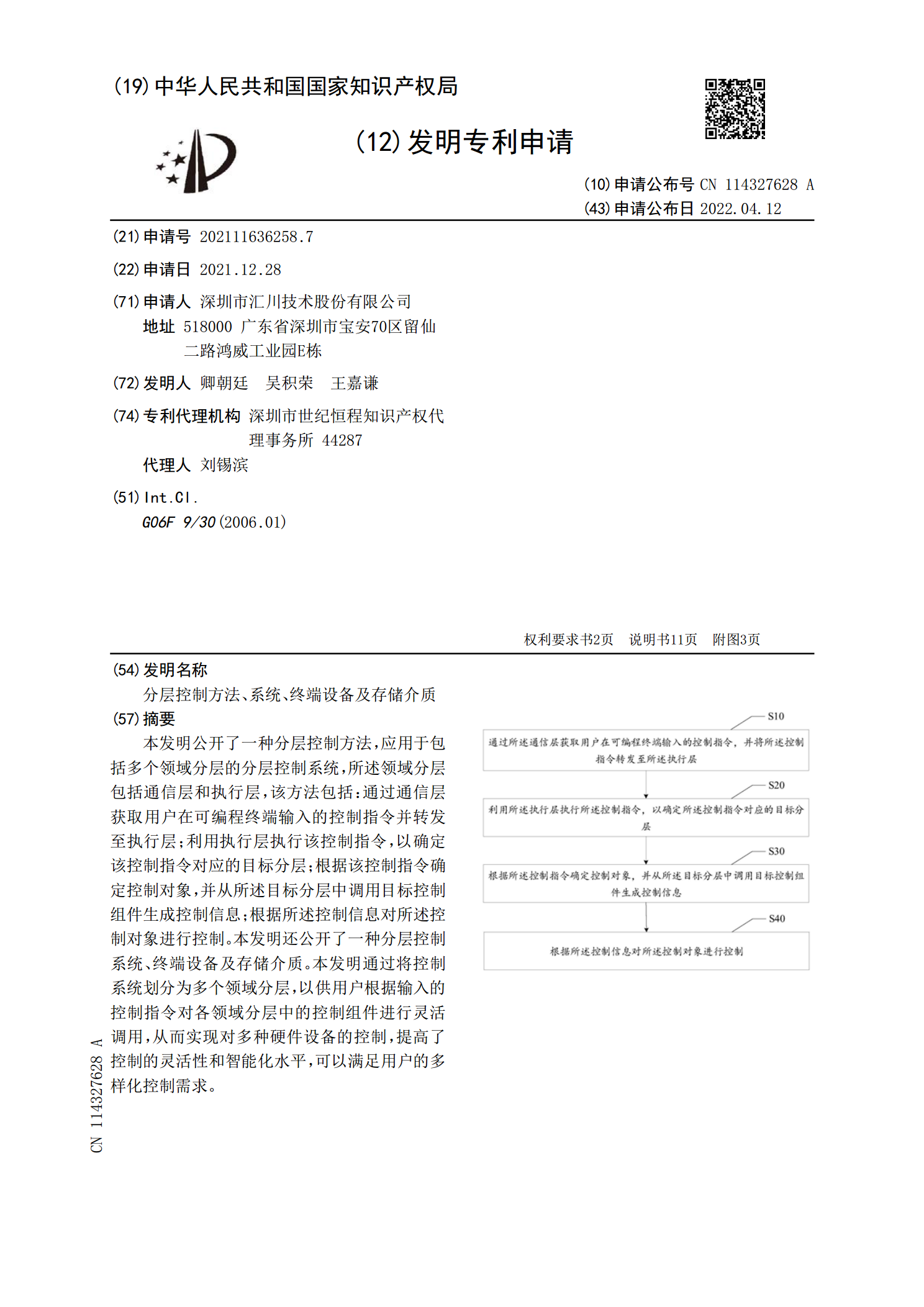
本发明公开了一种分层控制方法,应用于包括多个领域分层的分层控制系统,所述领域分层包括通信层和执行层,该方法包括:通过通信层获取用户在可编程终端输入的控制指令并转发至执行层;利用执行层执行该控制指令,以确定该控制指令对应的目标分层;根据该控制指令确定控制对象,并从所述目标分层中调用目标控制组件生成控制信息;根据所述控制信息对所述控制对象进行控制。本发明还公开了一种分层控制系统、终端设备及存储介质。本发明通过将控制系统划分为多个领域分层,以供用户根据输入的控制指令对各领域分层中的控制组件进行灵活调用,从而实现
行驶控制方法、系统、存储介质和计算机设备.pdf
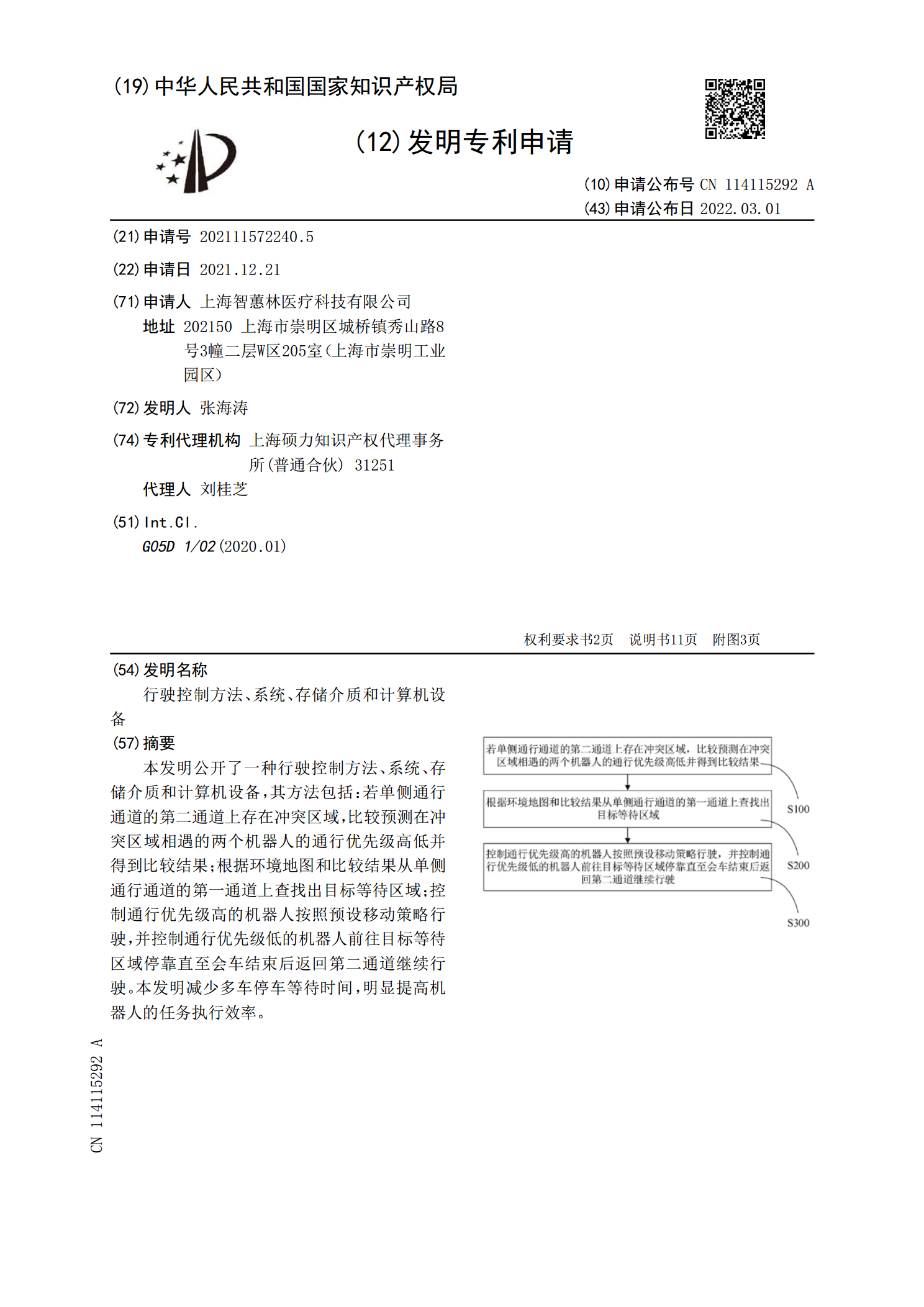
本发明公开了一种行驶控制方法、系统、存储介质和计算机设备,其方法包括:若单侧通行通道的第二通道上存在冲突区域,比较预测在冲突区域相遇的两个机器人的通行优先级高低并得到比较结果;根据环境地图和比较结果从单侧通行通道的第一通道上查找出目标等待区域;控制通行优先级高的机器人按照预设移动策略行驶,并控制通行优先级低的机器人前往目标等待区域停靠直至会车结束后返回第二通道继续行驶。本发明减少多车停车等待时间,明显提高机器人的任务执行效率。