
一种全向智能小车.pdf

是你****元呀

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种全向智能小车.pdf
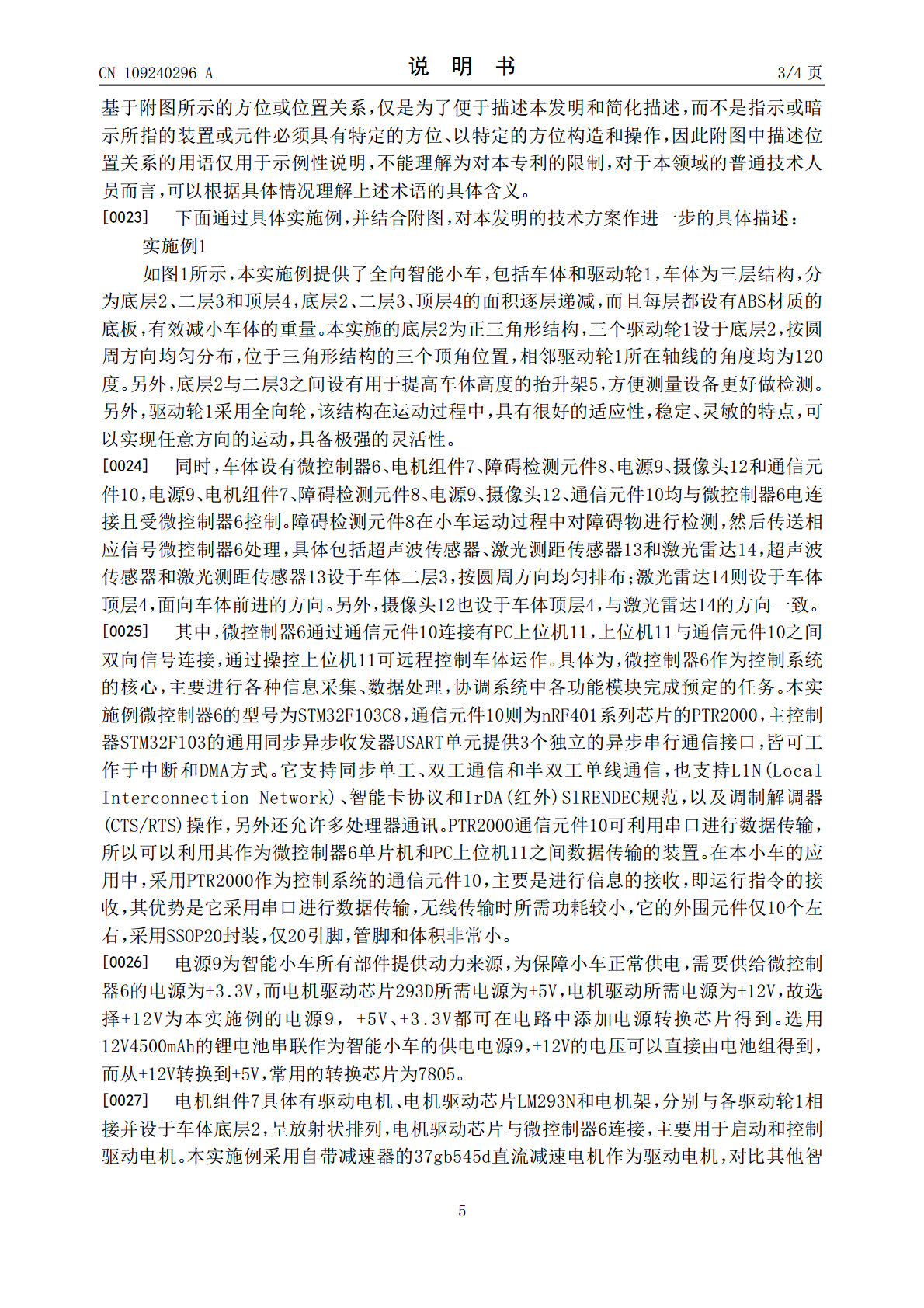
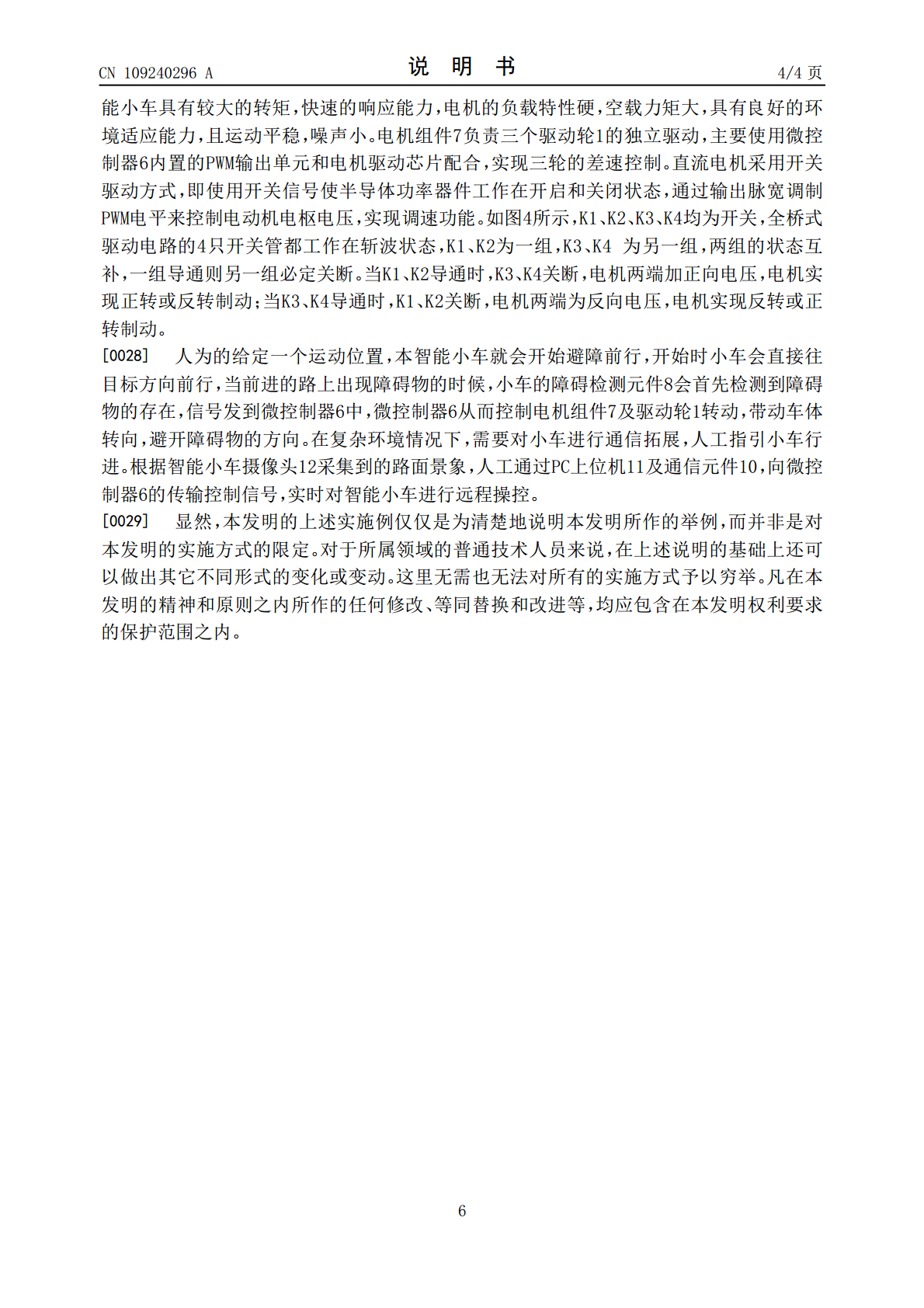
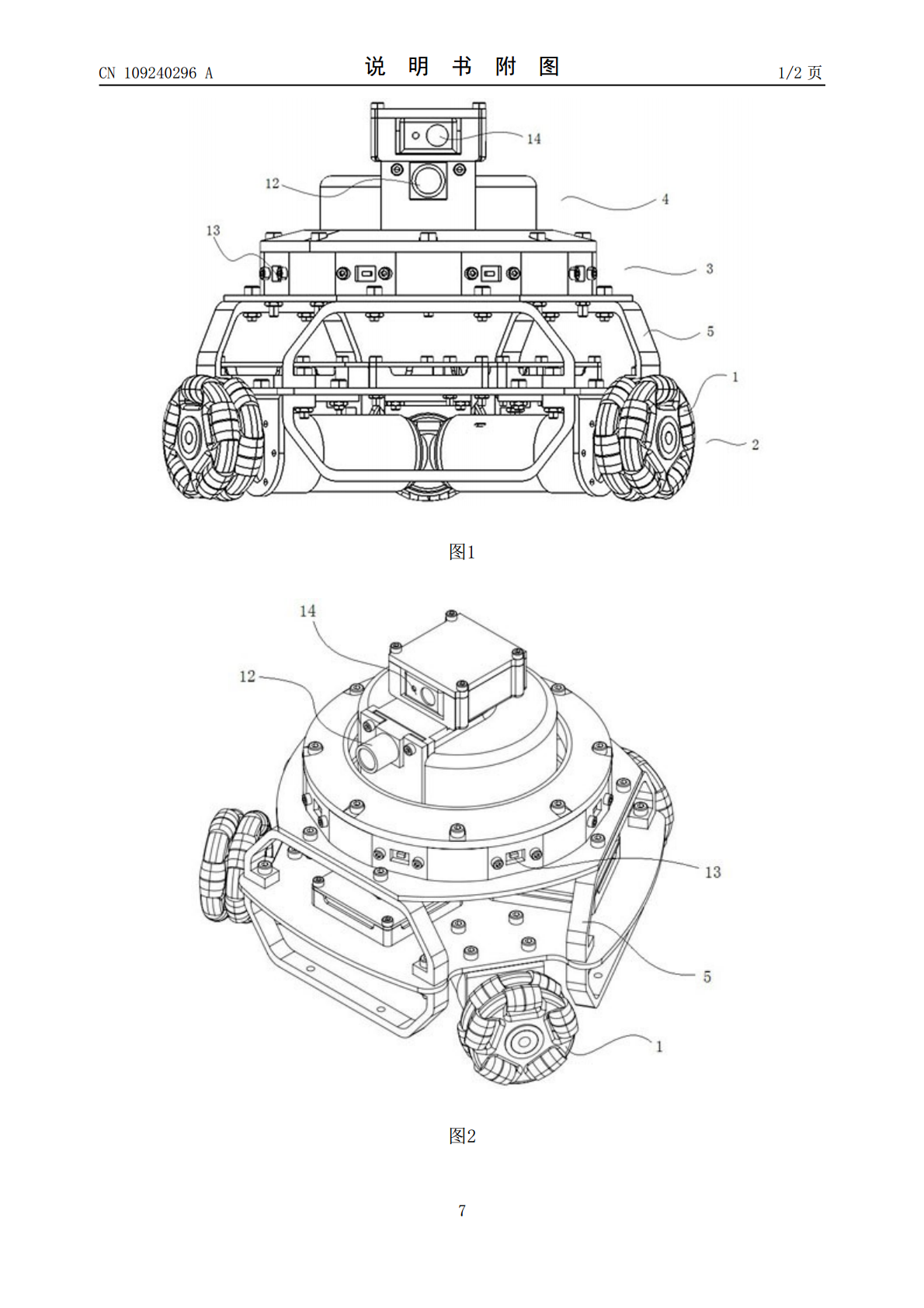
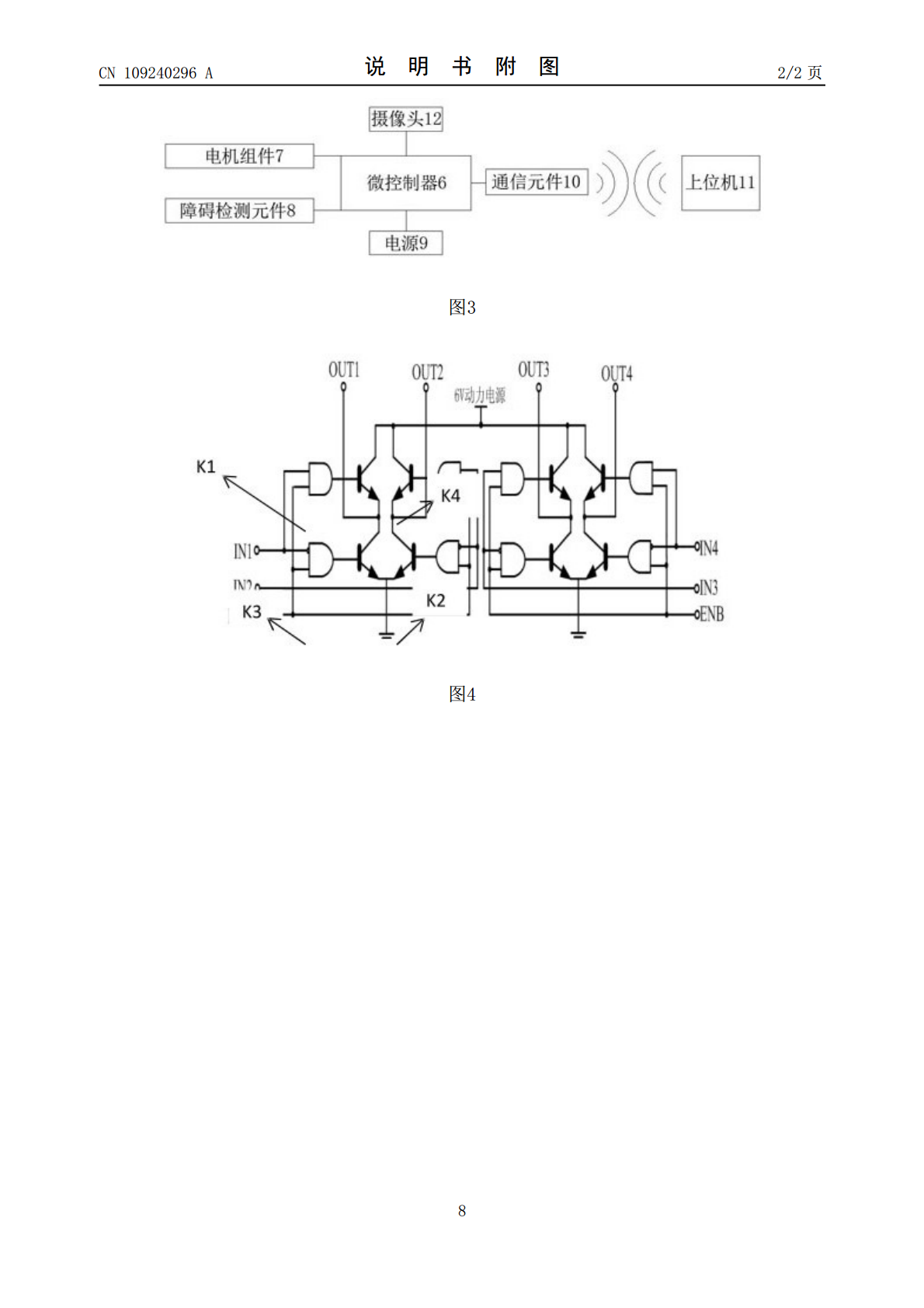
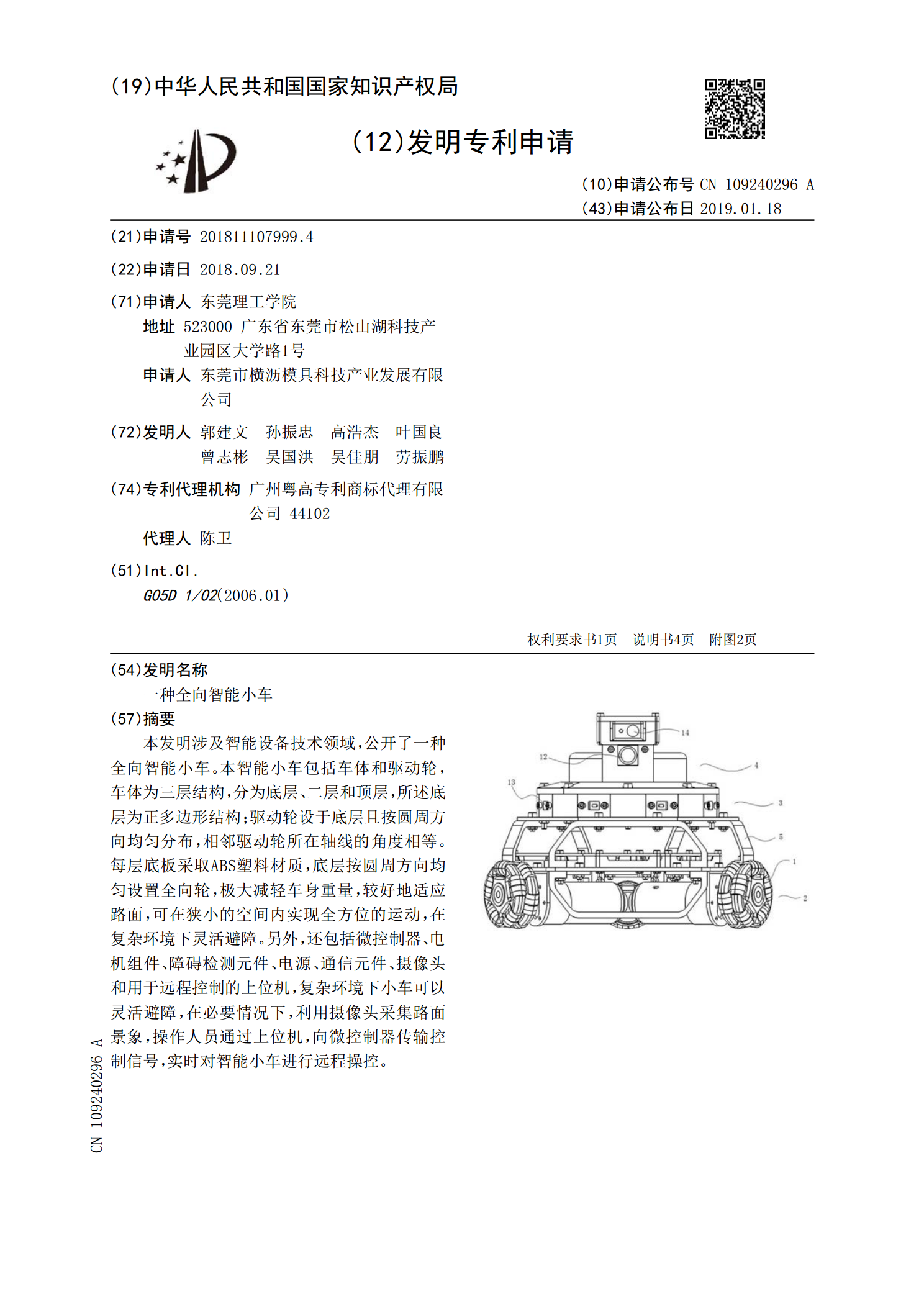
本发明涉及智能设备技术领域,公开了一种全向智能小车。本智能小车包括车体和驱动轮,车体为三层结构,分为底层、二层和顶层,所述底层为正多边形结构;驱动轮设于底层且按圆周方向均匀分布,相邻驱动轮所在轴线的角度相等。每层底板采取ABS塑料材质,底层按圆周方向均匀设置全向轮,极大减轻车身重量,较好地适应路面,可在狭小的空间内实现全方位的运动,在复杂环境下灵活避障。另外,还包括微控制器、电机组件、障碍检测元件、电源、通信元件、摄像头和用于远程控制的上位机,复杂环境下小车可以灵活避障,在必要情况下,利用摄像头采集路面景
一种智能全向AGV小车及其控制方法.pdf
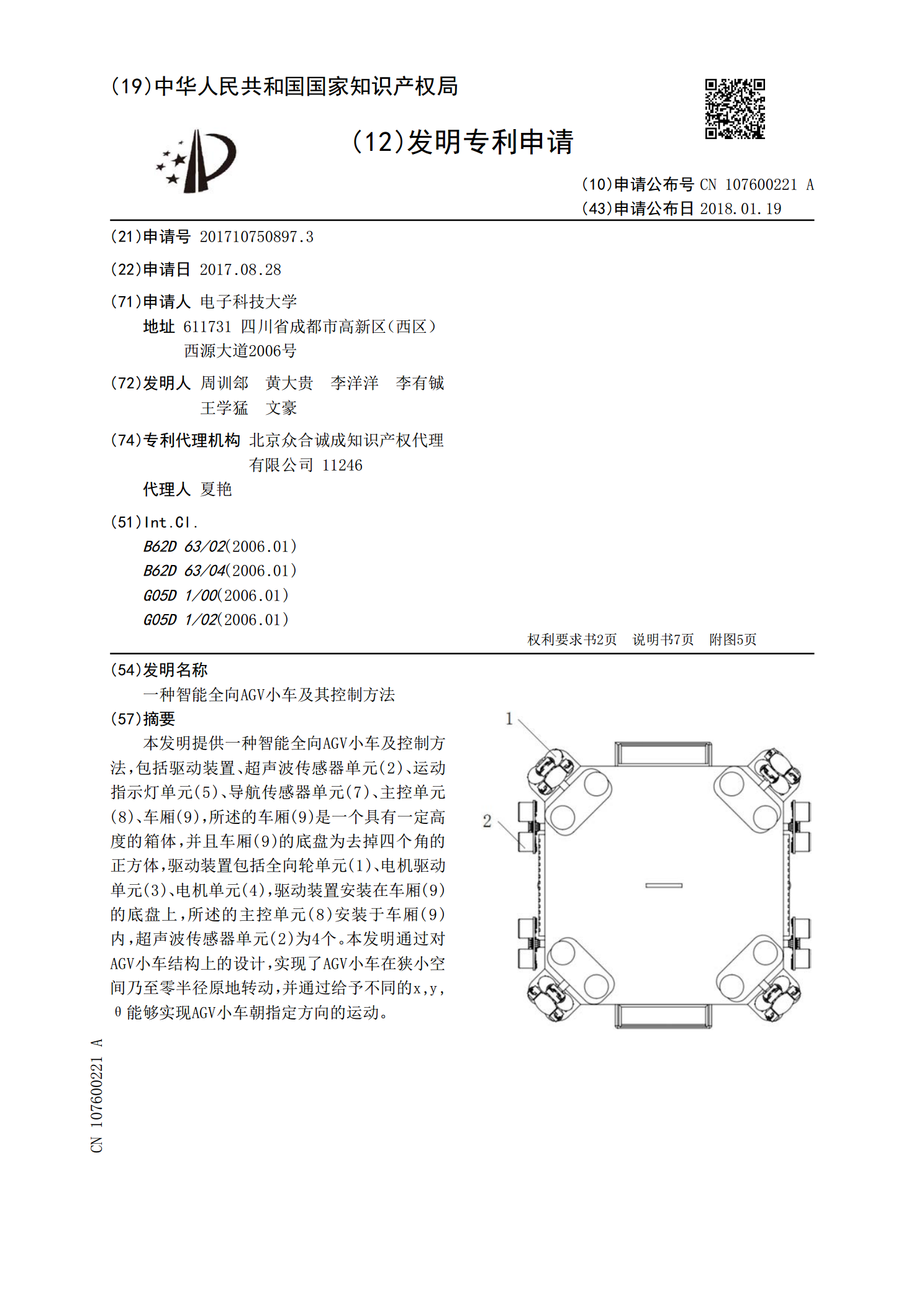
本发明提供一种智能全向AGV小车及控制方法,包括驱动装置、超声波传感器单元(2)、运动指示灯单元(5)、导航传感器单元(7)、主控单元(8)、车厢(9),所述的车厢(9)是一个具有一定高度的箱体,并且车厢(9)的底盘为去掉四个角的正方体,驱动装置包括全向轮单元(1)、电机驱动单元(3)、电机单元(4),驱动装置安装在车厢(9)的底盘上,所述的主控单元(8)安装于车厢(9)内,超声波传感器单元(2)为4个。本发明通过对AGV小车结构上的设计,实现了AGV小车在狭小空间乃至零半径原地转动,并通过给予不同的x,
一种全向移动小车.pdf
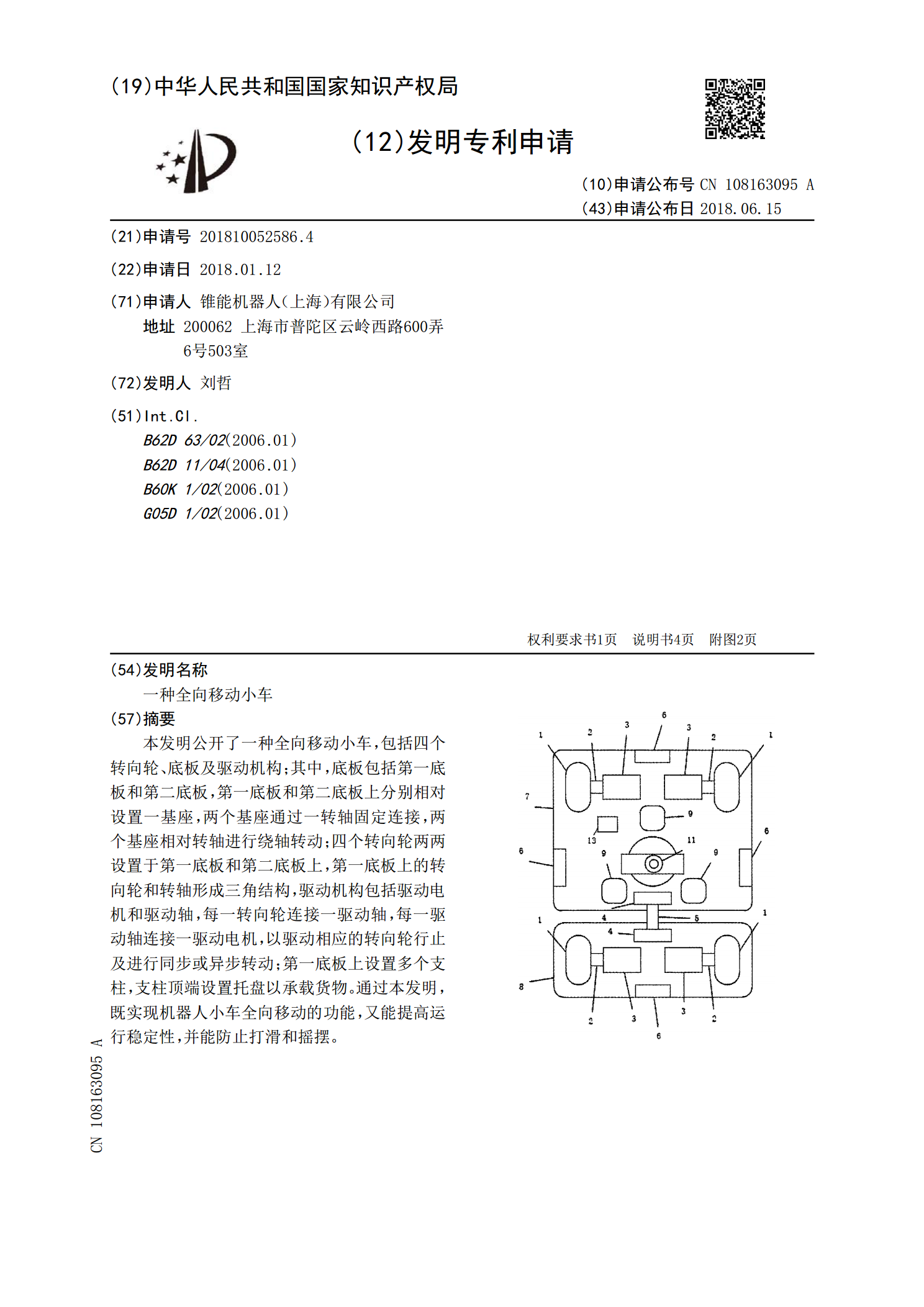
本发明公开了一种全向移动小车,包括四个转向轮、底板及驱动机构;其中,底板包括第一底板和第二底板,第一底板和第二底板上分别相对设置一基座,两个基座通过一转轴固定连接,两个基座相对转轴进行绕轴转动;四个转向轮两两设置于第一底板和第二底板上,第一底板上的转向轮和转轴形成三角结构,驱动机构包括驱动电机和驱动轴,每一转向轮连接一驱动轴,每一驱动轴连接一驱动电机,以驱动相应的转向轮行止及进行同步或异步转动;第一底板上设置多个支柱,支柱顶端设置托盘以承载货物。通过本发明,既实现机器人小车全向移动的功能,又能提高运行稳定
一种全向轮移动小车.pdf
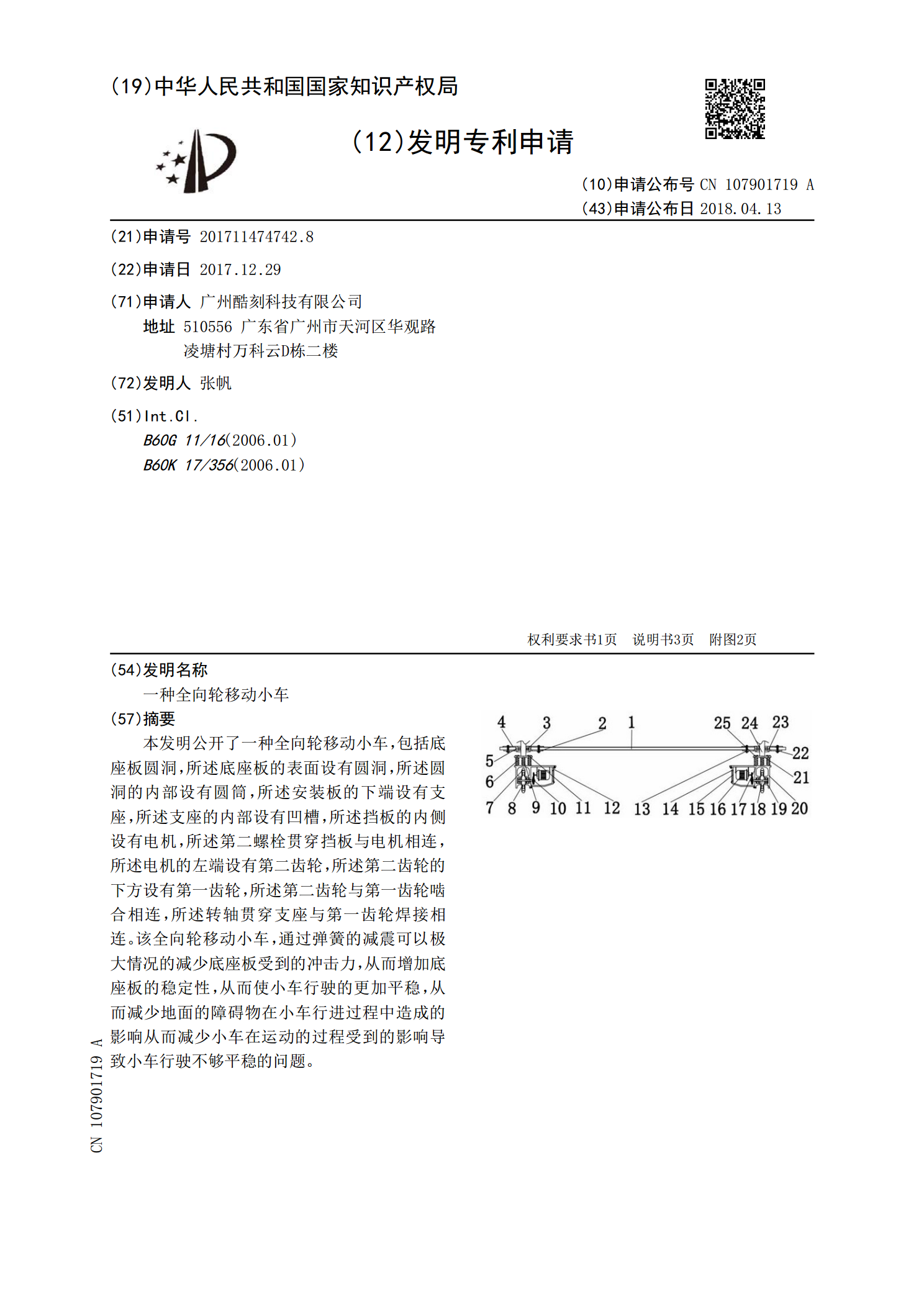
本发明公开了一种全向轮移动小车,包括底座板圆洞,所述底座板的表面设有圆洞,所述圆洞的内部设有圆筒,所述安装板的下端设有支座,所述支座的内部设有凹槽,所述挡板的内侧设有电机,所述第二螺栓贯穿挡板与电机相连,所述电机的左端设有第二齿轮,所述第二齿轮的下方设有第一齿轮,所述第二齿轮与第一齿轮啮合相连,所述转轴贯穿支座与第一齿轮焊接相连。该全向轮移动小车,通过弹簧的减震可以极大情况的减少底座板受到的冲击力,从而增加底座板的稳定性,从而使小车行驶的更加平稳,从而减少地面的障碍物在小车行进过程中造成的影响从而减少小车
一种稳定的全向摄影小车.pdf
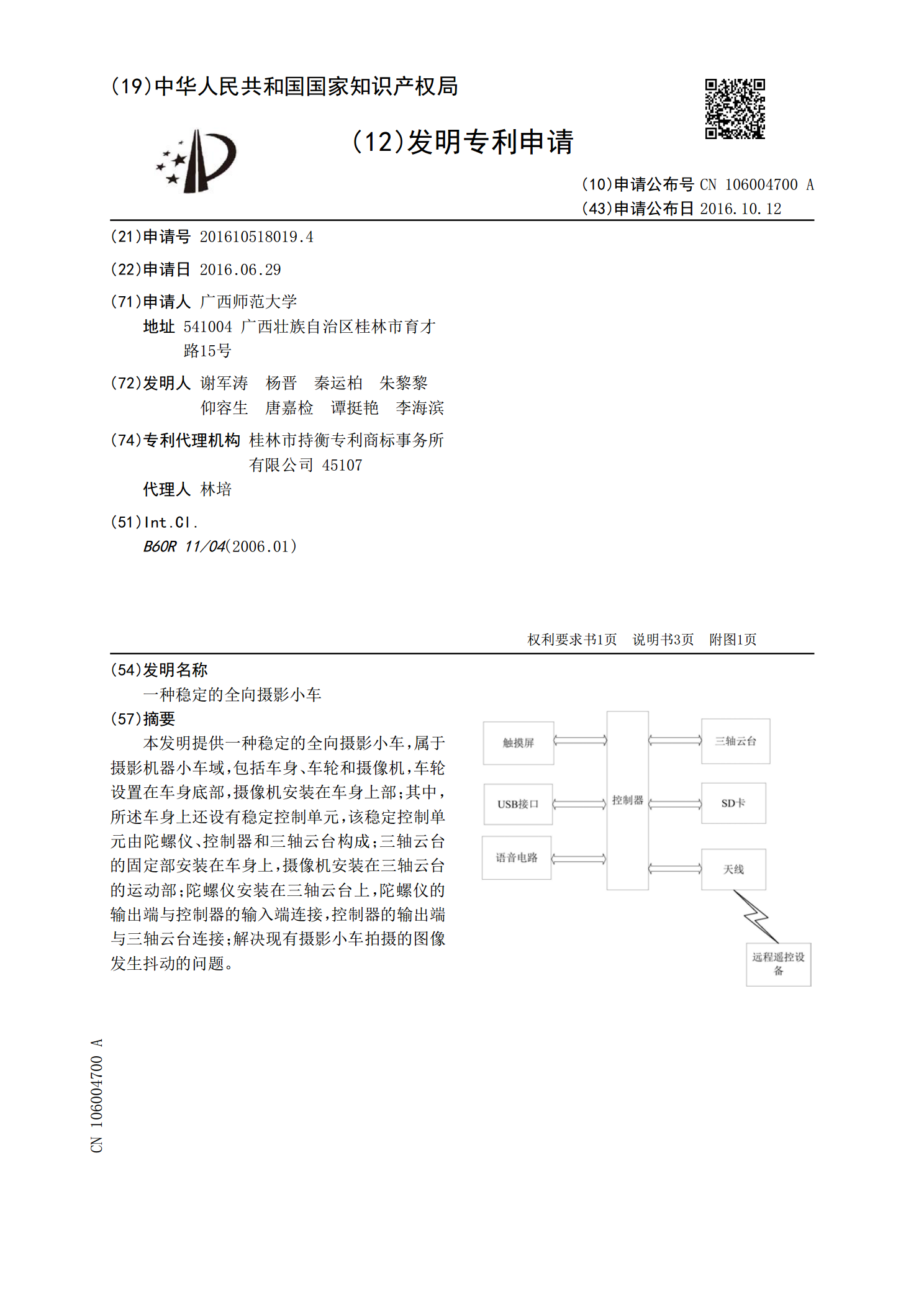
本发明提供一种稳定的全向摄影小车,属于摄影机器小车域,包括车身、车轮和摄像机,车轮设置在车身底部,摄像机安装在车身上部;其中,所述车身上还设有稳定控制单元,该稳定控制单元由陀螺仪、控制器和三轴云台构成;三轴云台的固定部安装在车身上,摄像机安装在三轴云台的运动部;陀螺仪安装在三轴云台上,陀螺仪的输出端与控制器的输入端连接,控制器的输出端与三轴云台连接;解决现有摄影小车拍摄的图像发生抖动的问题。