
一种智能全向AGV小车及其控制方法.pdf

康佳****文库

1/10
2/10
3/10
4/10

5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种智能全向AGV小车及其控制方法.pdf
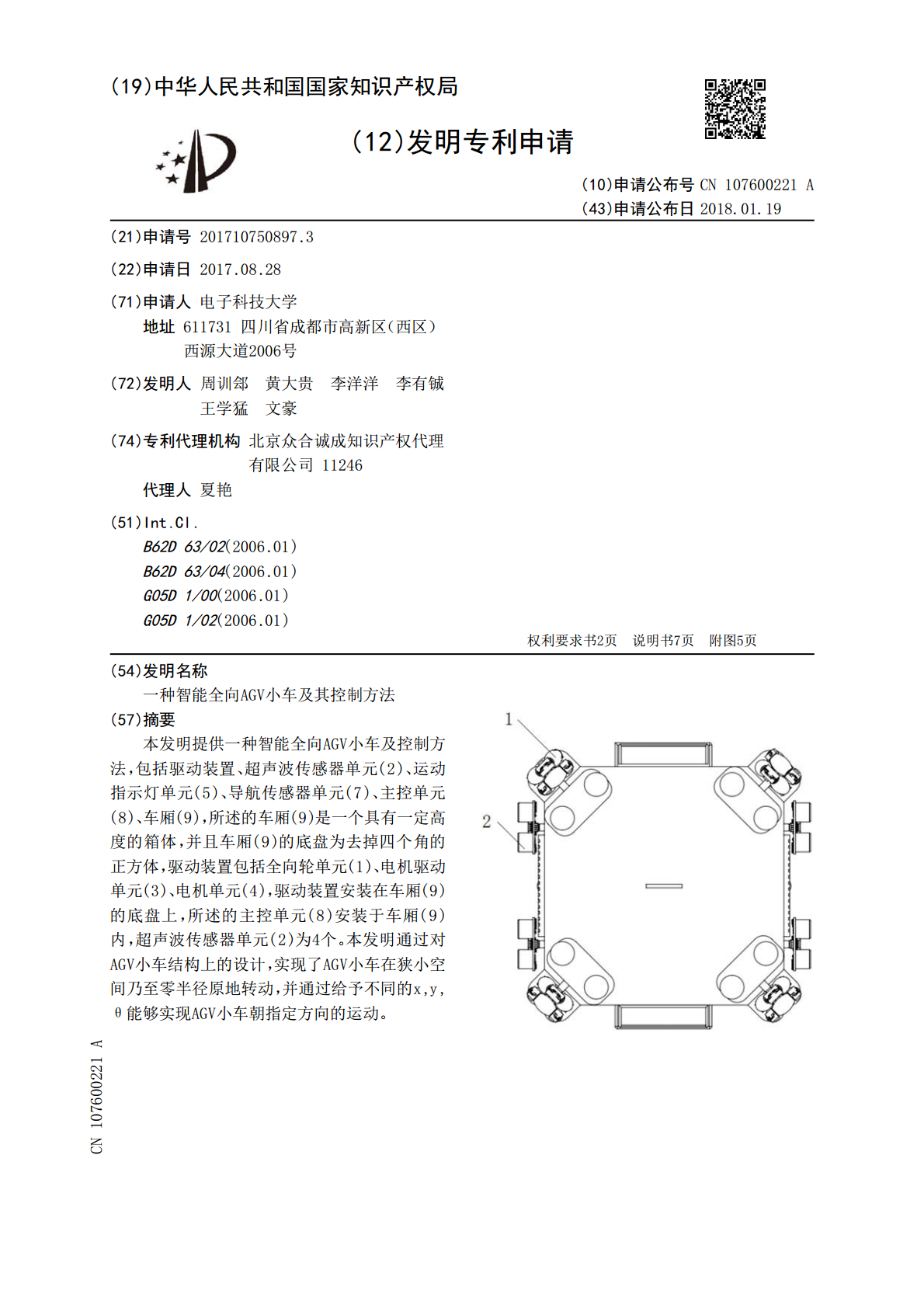
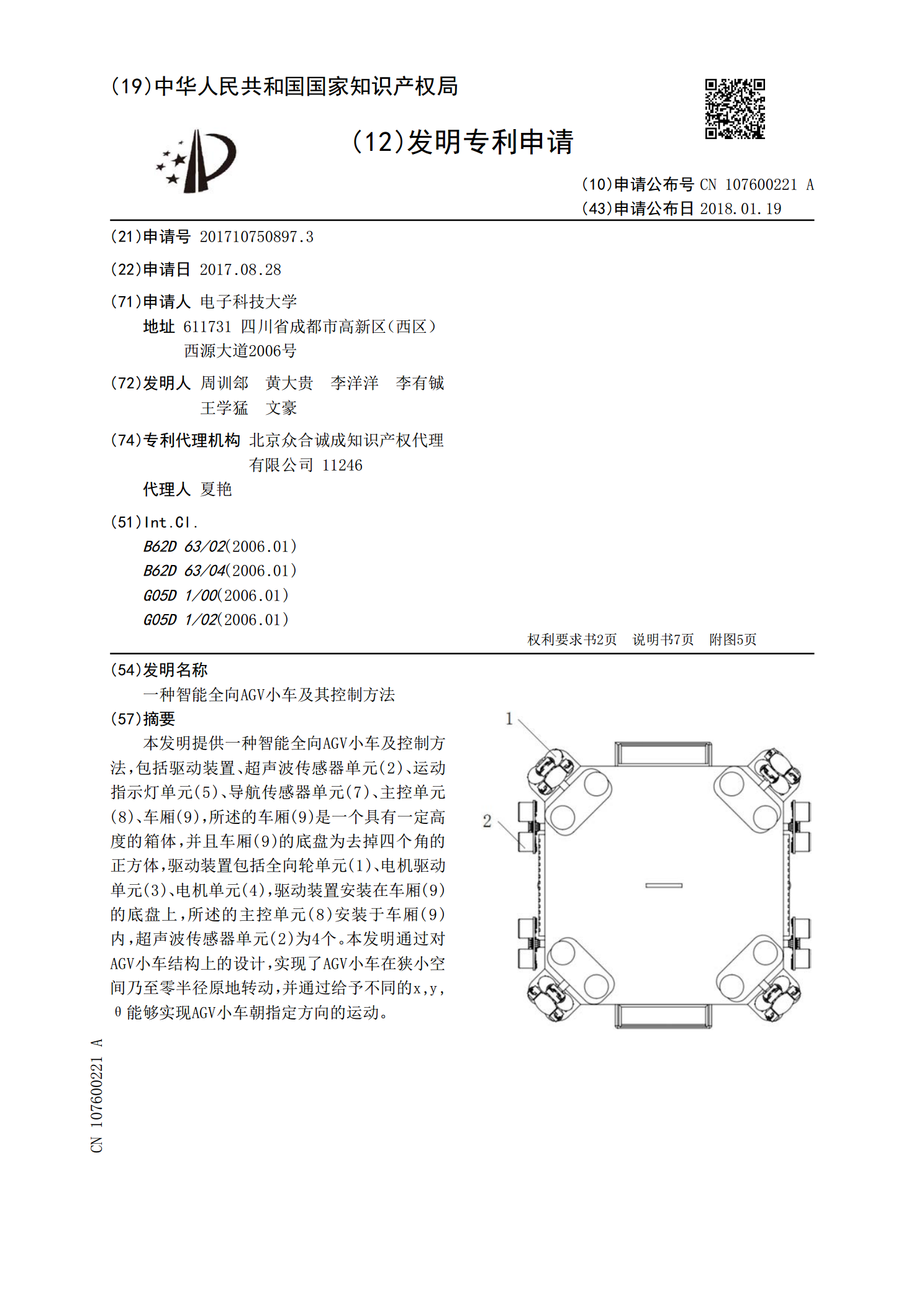
本发明提供一种智能全向AGV小车及控制方法,包括驱动装置、超声波传感器单元(2)、运动指示灯单元(5)、导航传感器单元(7)、主控单元(8)、车厢(9),所述的车厢(9)是一个具有一定高度的箱体,并且车厢(9)的底盘为去掉四个角的正方体,驱动装置包括全向轮单元(1)、电机驱动单元(3)、电机单元(4),驱动装置安装在车厢(9)的底盘上,所述的主控单元(8)安装于车厢(9)内,超声波传感器单元(2)为4个。本发明通过对AGV小车结构上的设计,实现了AGV小车在狭小空间乃至零半径原地转动,并通过给予不同的x,
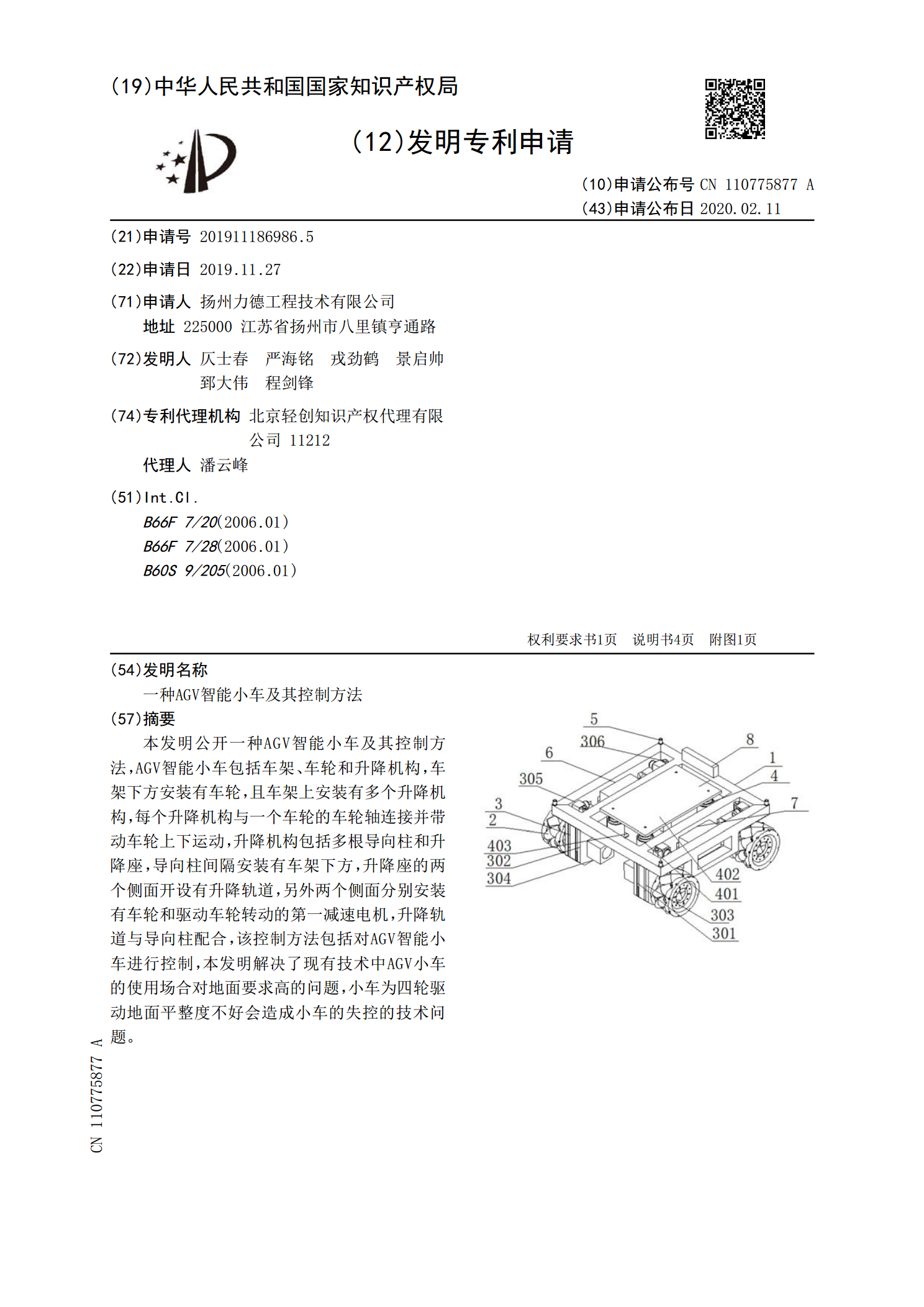
一种AGV智能小车及其控制方法.pdf
本发明公开一种AGV智能小车及其控制方法,AGV智能小车包括车架、车轮和升降机构,车架下方安装有车轮,且车架上安装有多个升降机构,每个升降机构与一个车轮的车轮轴连接并带动车轮上下运动,升降机构包括多根导向柱和升降座,导向柱间隔安装有车架下方,升降座的两个侧面开设有升降轨道,另外两个侧面分别安装有车轮和驱动车轮转动的第一减速电机,升降轨道与导向柱配合,该控制方法包括对AGV智能小车进行控制,本发明解决了现有技术中AGV小车的使用场合对地面要求高的问题,小车为四轮驱动地面平整度不好会造成小车的失控的技术问题。

一种智能AGV小车及其系统.pdf
一种智能AGV小车及其系统,所述AGV小车包括车体、装载装置、小车控制柜、驱动组件和万向轮,所述装载装置设置于所述车体的上端面,所述小车控制柜的底部设有滑轮,所述小车控制柜通过所述小车内部设有的导轨采用抽屉形式可抽出的设置于所述小车的内部,所述驱动组件设置于所述车体的底部,所述驱动组件包括驱动电机和驱动轮,所述驱动轮连接于所述驱动电机的输出端;所述AGV小车由所述驱动轮和万向轮支撑于地面,所述驱动电机驱动所述驱动轮进行前进和后退运动。本发明提出一种代替人工转移搬运的智能AGV小车及其系统,实现不同方位、远
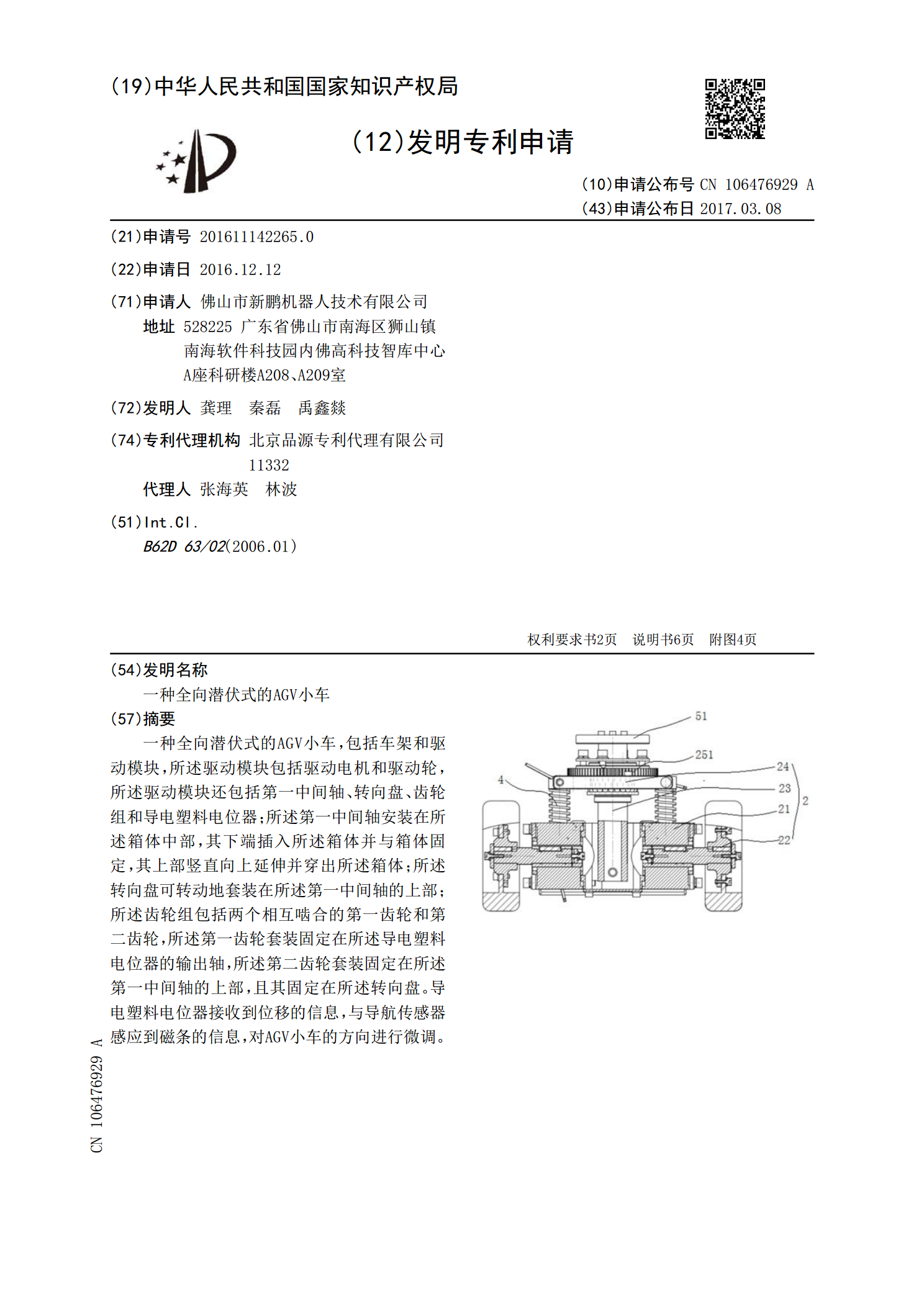
一种全向潜伏式的AGV小车.pdf
一种全向潜伏式的AGV小车,包括车架和驱动模块,所述驱动模块包括驱动电机和驱动轮,所述驱动模块还包括第一中间轴、转向盘、齿轮组和导电塑料电位器;所述第一中间轴安装在所述箱体中部,其下端插入所述箱体并与箱体固定,其上部竖直向上延伸并穿出所述箱体;所述转向盘可转动地套装在所述第一中间轴的上部;所述齿轮组包括两个相互啮合的第一齿轮和第二齿轮,所述第一齿轮套装固定在所述导电塑料电位器的输出轴,所述第二齿轮套装固定在所述第一中间轴的上部,且其固定在所述转向盘。导电塑料电位器接收到位移的信息,与导航传感器感应到磁条的
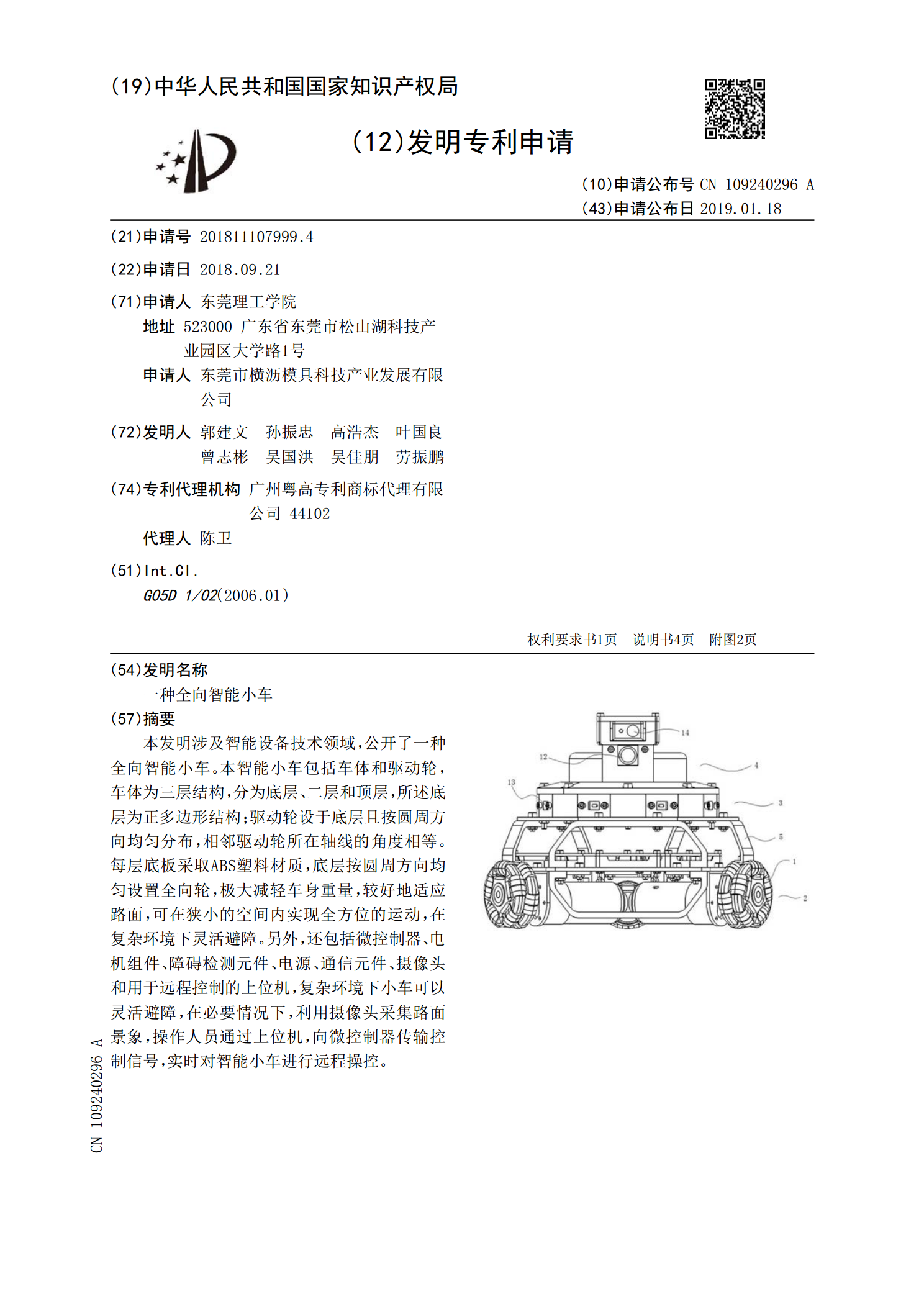
一种全向智能小车.pdf
本发明涉及智能设备技术领域,公开了一种全向智能小车。本智能小车包括车体和驱动轮,车体为三层结构,分为底层、二层和顶层,所述底层为正多边形结构;驱动轮设于底层且按圆周方向均匀分布,相邻驱动轮所在轴线的角度相等。每层底板采取ABS塑料材质,底层按圆周方向均匀设置全向轮,极大减轻车身重量,较好地适应路面,可在狭小的空间内实现全方位的运动,在复杂环境下灵活避障。另外,还包括微控制器、电机组件、障碍检测元件、电源、通信元件、摄像头和用于远程控制的上位机,复杂环境下小车可以灵活避障,在必要情况下,利用摄像头采集路面景