
一种轮式机器人全向移动底盘.pdf

梅雪****67

1/8

2/8

3/8

4/8
5/8

6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种轮式机器人全向移动底盘.pdf
本发明属于轮式机器人技术领域,具体地说是一种轮式机器人全向移动底盘。包括后箱体、前箱体、导向驱动轮及铰接关节,其中后箱体和前箱体通过铰接关节连接,后箱体和前箱体的底部均设有两个导向驱动轮,导向驱动轮包括导向驱动机构、连接法兰、直线悬挂装置及轮毂电机,其中导向驱动机构通过连接法兰与直线悬挂装置连接,直线悬挂装置与轮毂电机连接。本发明通过前、后箱体之间的被动铰接关节使轮式机器人地形适应性更强,铰接关节密封设计保证了机器人线缆的整体密封要求。
一种全向移动的底盘、全向移动的底盘系统及机器人系统.pdf
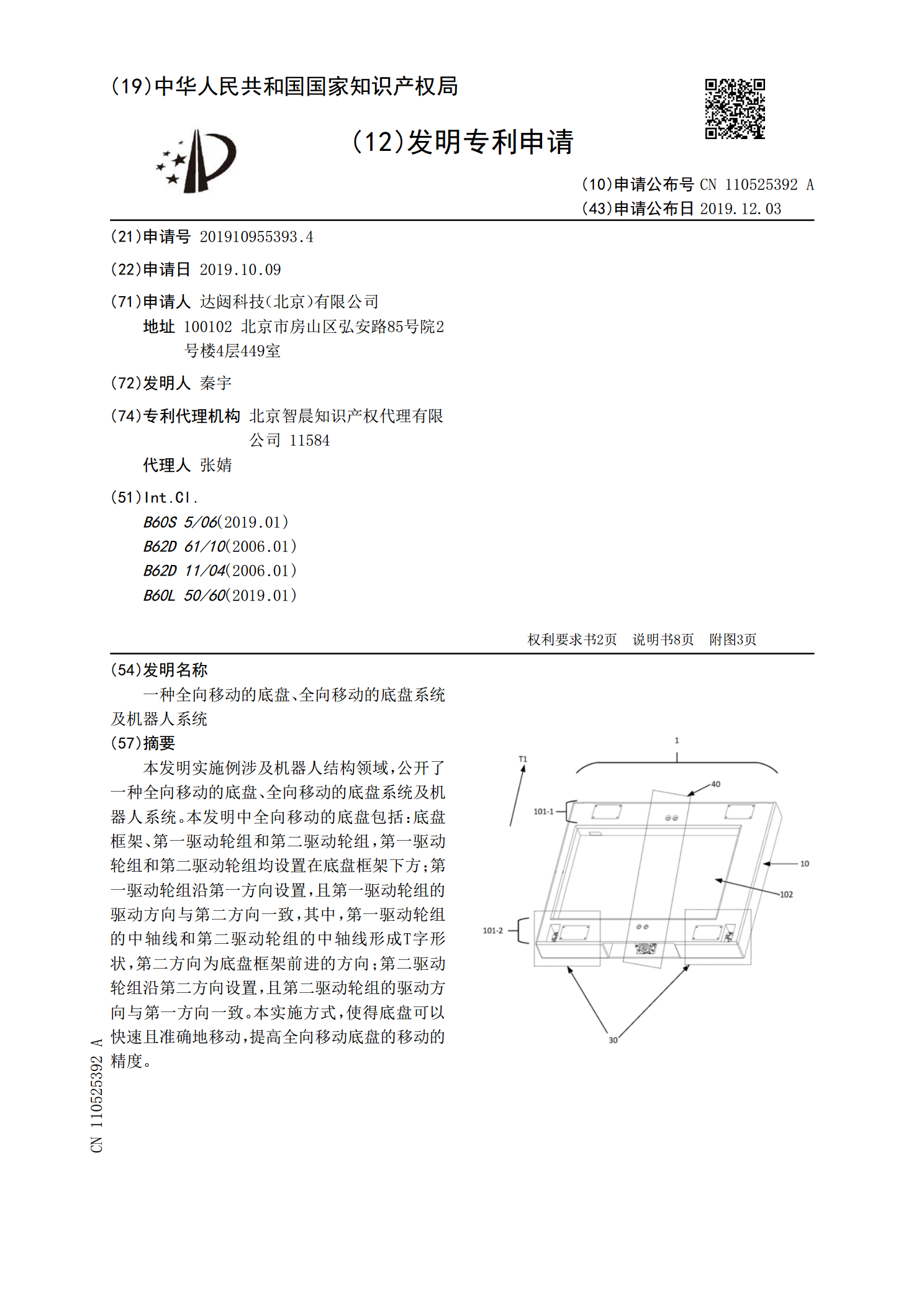
本发明实施例涉及机器人结构领域,公开了一种全向移动的底盘、全向移动的底盘系统及机器人系统。本发明中全向移动的底盘包括:底盘框架、第一驱动轮组和第二驱动轮组,第一驱动轮组和第二驱动轮组均设置在底盘框架下方;第一驱动轮组沿第一方向设置,且第一驱动轮组的驱动方向与第二方向一致,其中,第一驱动轮组的中轴线和第二驱动轮组的中轴线形成T字形状,第二方向为底盘框架前进的方向;第二驱动轮组沿第二方向设置,且第二驱动轮组的驱动方向与第一方向一致。本实施方式,使得底盘可以快速且准确地移动,提高全向移动底盘的移动的精度。

一种轮式全向移动底盘及其控制方法.pdf
本发明公开了一种轮式全向移动底盘及其控制方法,包括底盘,所述底盘包括水平设置的框架和固定在框架内的Y型支架,所述Y型支架包括三条支臂:支臂A、支臂B和支臂C,在三条支臂上分别设置一个电机,在三个电机的输出轴上分别设置一个全向滚轮,每个电机能够带动对应的全向滚轮转动;在Y型支架上还设有控制器和电源,所述控制器与三个电机相连,并能够控制三个电机同时或分别工作;所述电源为控制器和三个电机供电;所述控制方法能够实现底盘的横向移动、前后移动以及原地转动。本发明能够进行横向行驶,转弯半径小,并能够原地转向,从而能够大
一种机器人全向移动底盘结构.pdf
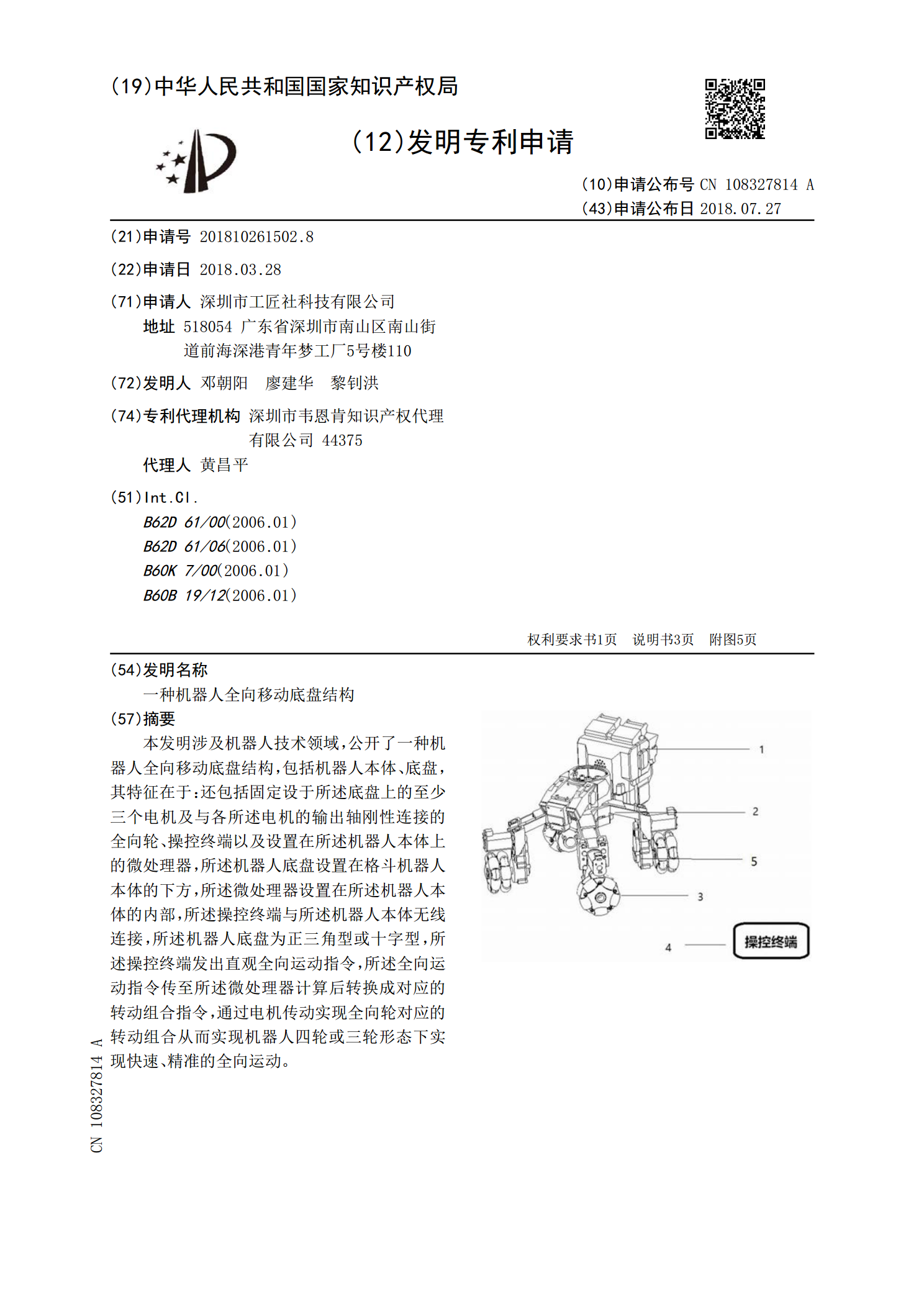
本发明涉及机器人技术领域,公开了一种机器人全向移动底盘结构,包括机器人本体、底盘,其特征在于:还包括固定设于所述底盘上的至少三个电机及与各所述电机的输出轴刚性连接的全向轮、操控终端以及设置在所述机器人本体上的微处理器,所述机器人底盘设置在格斗机器人本体的下方,所述微处理器设置在所述机器人本体的内部,所述操控终端与所述机器人本体无线连接,所述机器人底盘为正三角型或十字型,所述操控终端发出直观全向运动指令,所述全向运动指令传至所述微处理器计算后转换成对应的转动组合指令,通过电机传动实现全向轮对应的转动组合从而

全向轮式可移动重载铸造机器人.pdf
本发明公开了一种全向轮式可移动重载铸造机器人,包括四驱轮式移动平台、回转装置、升降装置、并联工作臂、配重装置、末端执行器和双目视觉系统。本发明的四驱轮式移动平台采用四轮全向移动加四角驻点自平衡支撑的方式,实现长距离灵活稳定行走和驻点自平衡支撑,提高作业的支撑稳定性,机器人本体还具有空间三个移动和两个转动共五个运动自由度;回转装置、升降装置可分别实现回转和升降调节,四自由度并联工作臂可对末端执行器进行姿态调节,可根据工作需要更换不同的末端执行器,满足中大型铸件的组芯、下芯、浇注和搬运等不同作业的需求,提高铸