
全向轮式可移动重载铸造机器人.pdf

Do****76


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

全向轮式可移动重载铸造机器人.pdf
本发明公开了一种全向轮式可移动重载铸造机器人,包括四驱轮式移动平台、回转装置、升降装置、并联工作臂、配重装置、末端执行器和双目视觉系统。本发明的四驱轮式移动平台采用四轮全向移动加四角驻点自平衡支撑的方式,实现长距离灵活稳定行走和驻点自平衡支撑,提高作业的支撑稳定性,机器人本体还具有空间三个移动和两个转动共五个运动自由度;回转装置、升降装置可分别实现回转和升降调节,四自由度并联工作臂可对末端执行器进行姿态调节,可根据工作需要更换不同的末端执行器,满足中大型铸件的组芯、下芯、浇注和搬运等不同作业的需求,提高铸
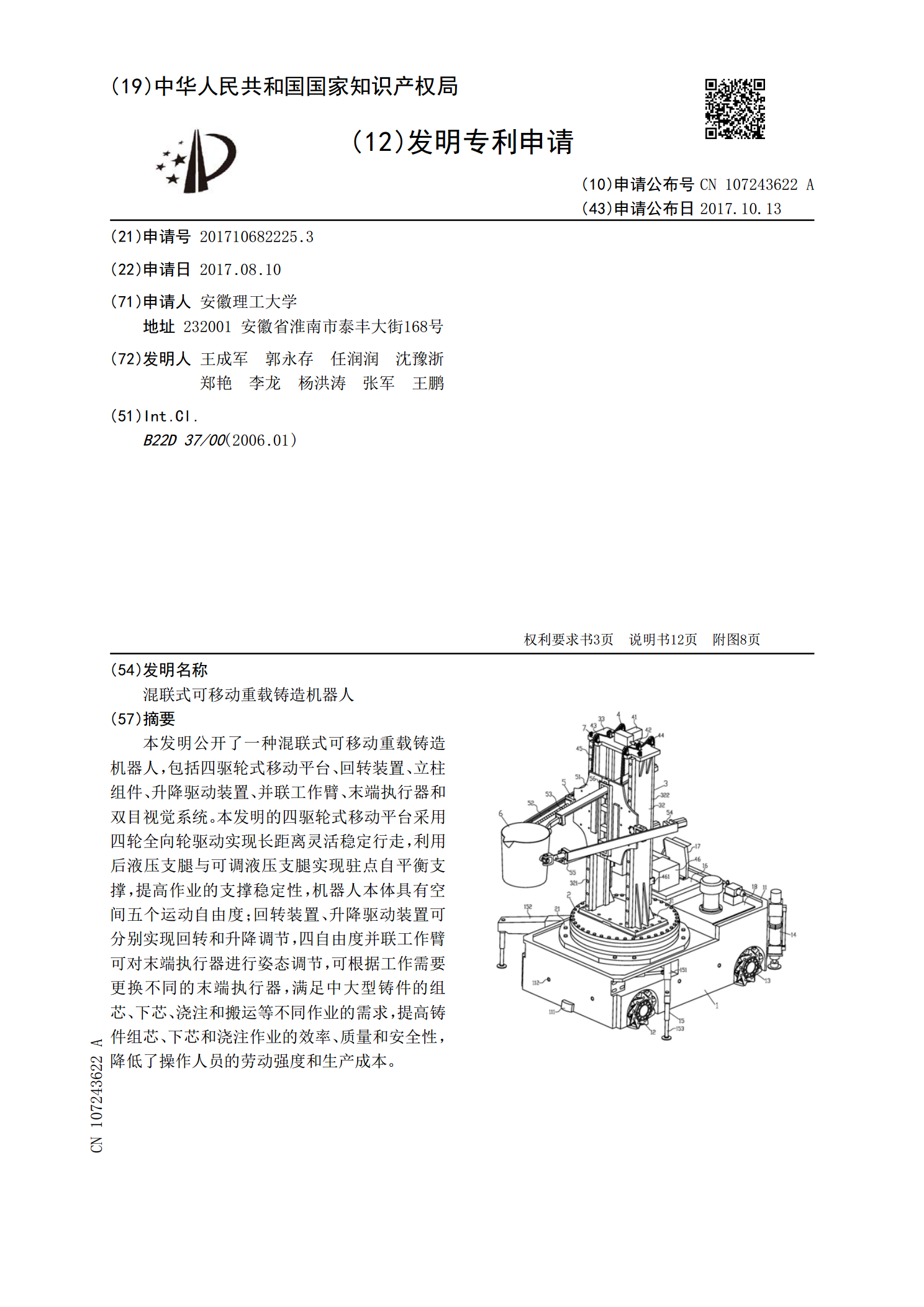
混联式可移动重载铸造机器人.pdf
本发明公开了一种混联式可移动重载铸造机器人,包括四驱轮式移动平台、回转装置、立柱组件、升降驱动装置、并联工作臂、末端执行器和双目视觉系统。本发明的四驱轮式移动平台采用四轮全向轮驱动实现长距离灵活稳定行走,利用后液压支腿与可调液压支腿实现驻点自平衡支撑,提高作业的支撑稳定性,机器人本体具有空间五个运动自由度;回转装置、升降驱动装置可分别实现回转和升降调节,四自由度并联工作臂可对末端执行器进行姿态调节,可根据工作需要更换不同的末端执行器,满足中大型铸件的组芯、下芯、浇注和搬运等不同作业的需求,提高铸件组芯、下
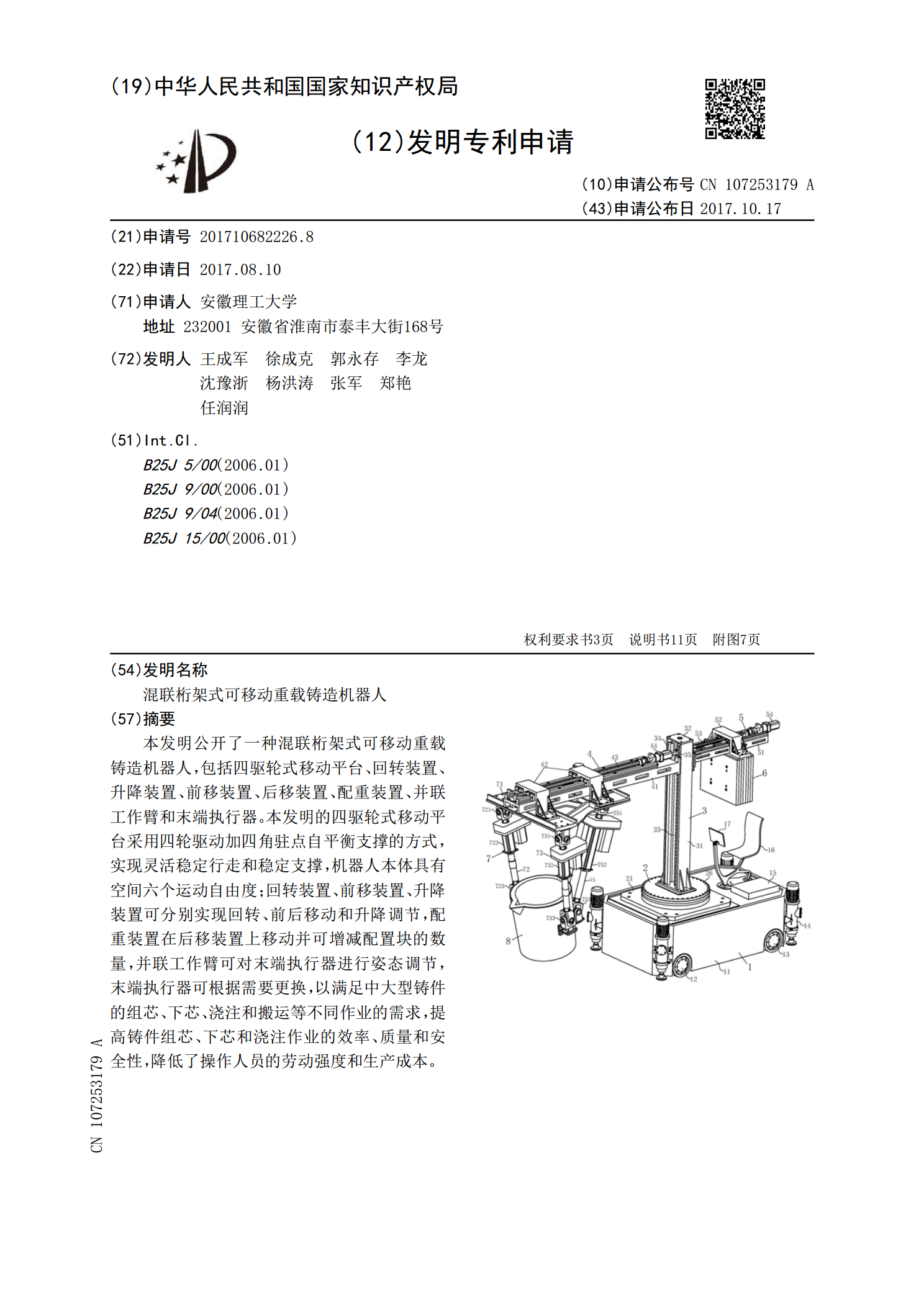
混联桁架式可移动重载铸造机器人.pdf
本发明公开了一种混联桁架式可移动重载铸造机器人,包括四驱轮式移动平台、回转装置、升降装置、前移装置、后移装置、配重装置、并联工作臂和末端执行器。本发明的四驱轮式移动平台采用四轮驱动加四角驻点自平衡支撑的方式,实现灵活稳定行走和稳定支撑,机器人本体具有空间六个运动自由度;回转装置、前移装置、升降装置可分别实现回转、前后移动和升降调节,配重装置在后移装置上移动并可增减配置块的数量,并联工作臂可对末端执行器进行姿态调节,末端执行器可根据需要更换,以满足中大型铸件的组芯、下芯、浇注和搬运等不同作业的需求,提高铸件
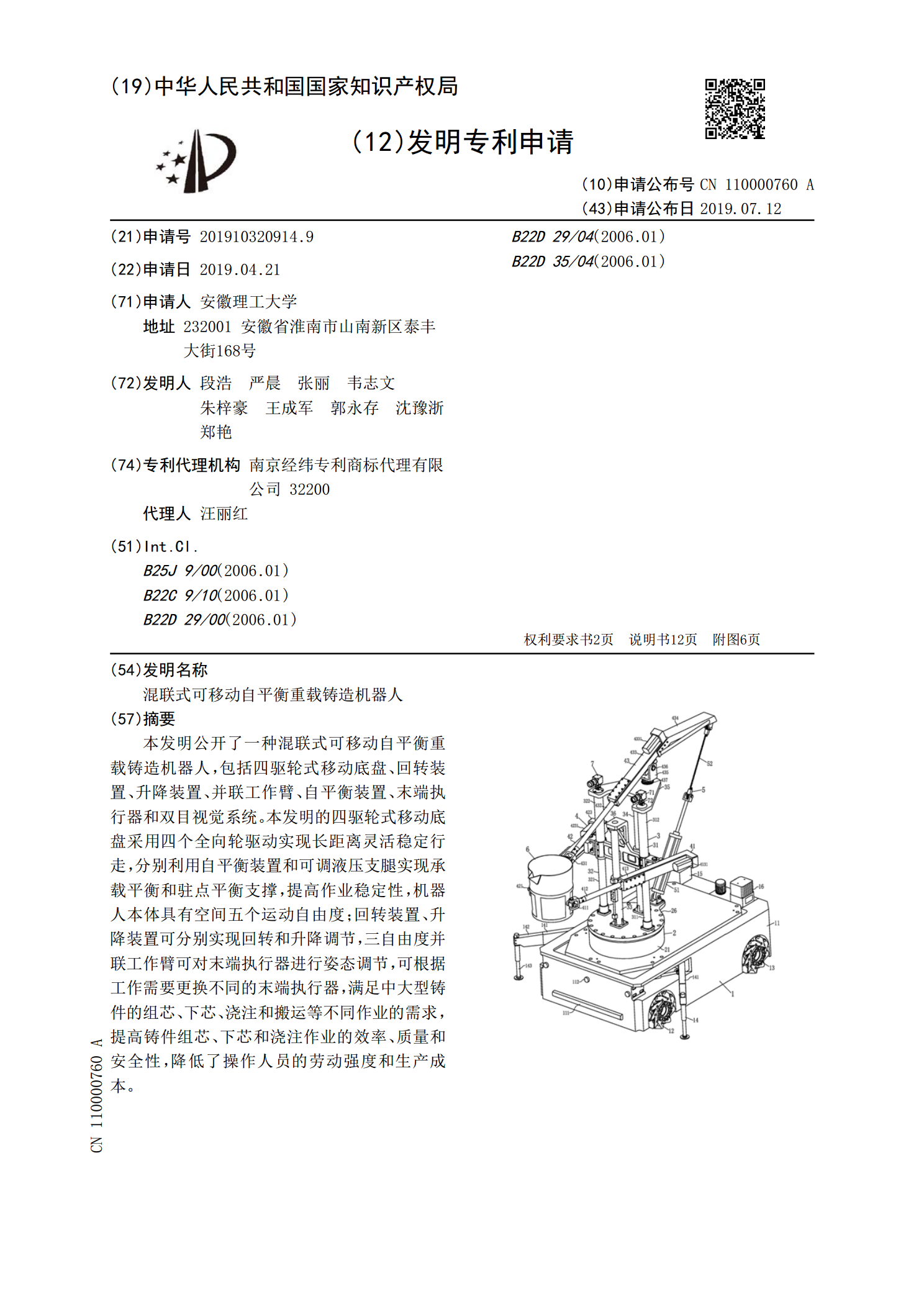
混联式可移动自平衡重载铸造机器人.pdf
本发明公开了一种混联式可移动自平衡重载铸造机器人,包括四驱轮式移动底盘、回转装置、升降装置、并联工作臂、自平衡装置、末端执行器和双目视觉系统。本发明的四驱轮式移动底盘采用四个全向轮驱动实现长距离灵活稳定行走,分别利用自平衡装置和可调液压支腿实现承载平衡和驻点平衡支撑,提高作业稳定性,机器人本体具有空间五个运动自由度;回转装置、升降装置可分别实现回转和升降调节,三自由度并联工作臂可对末端执行器进行姿态调节,可根据工作需要更换不同的末端执行器,满足中大型铸件的组芯、下芯、浇注和搬运等不同作业的需求,提高铸件组
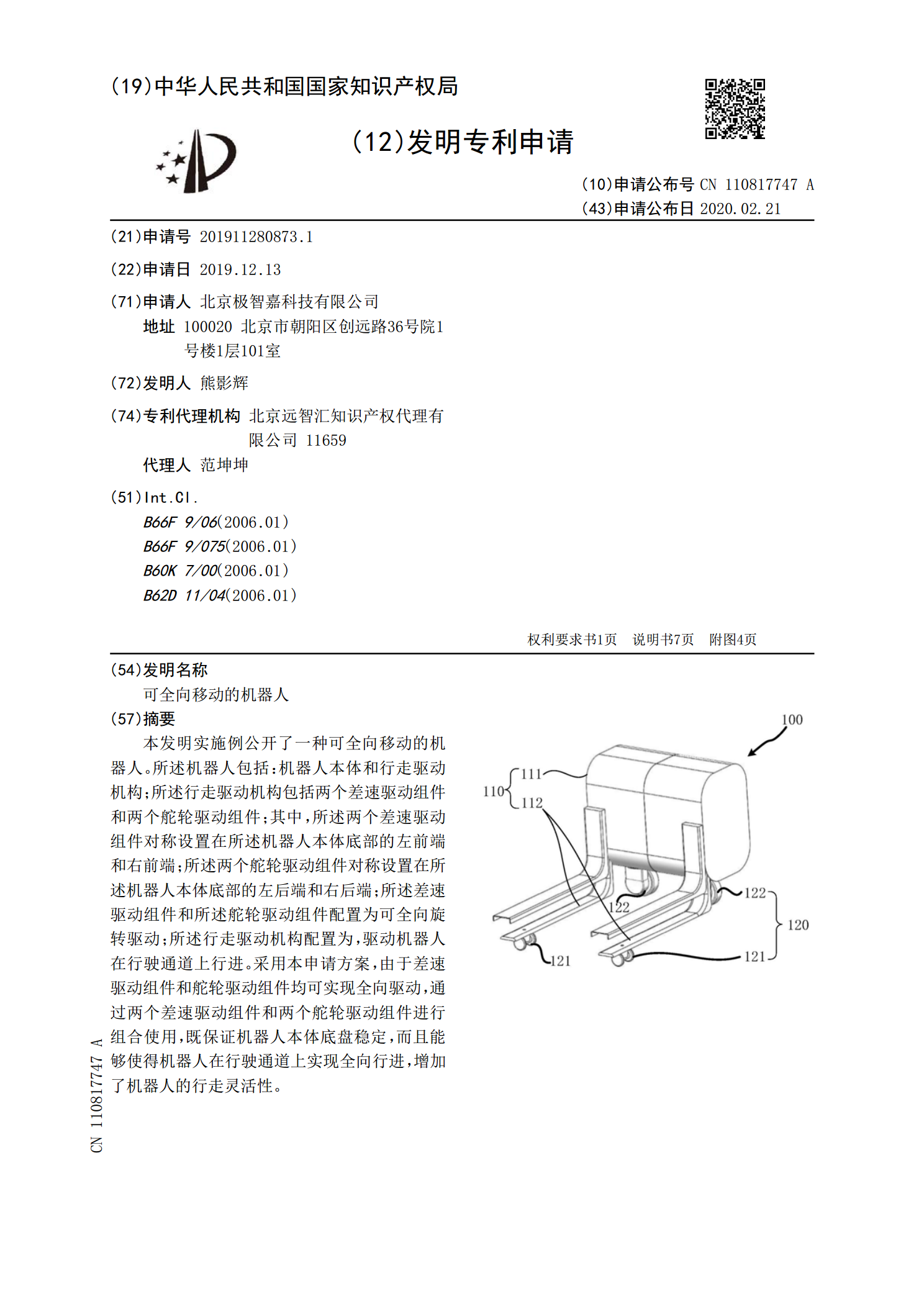
可全向移动的机器人.pdf
本发明实施例公开了一种可全向移动的机器人。所述机器人包括:机器人本体和行走驱动机构;所述行走驱动机构包括两个差速驱动组件和两个舵轮驱动组件;其中,所述两个差速驱动组件对称设置在所述机器人本体底部的左前端和右前端;所述两个舵轮驱动组件对称设置在所述机器人本体底部的左后端和右后端;所述差速驱动组件和所述舵轮驱动组件配置为可全向旋转驱动;所述行走驱动机构配置为,驱动机器人在行驶通道上行进。采用本申请方案,由于差速驱动组件和舵轮驱动组件均可实现全向驱动,通过两个差速驱动组件和两个舵轮驱动组件进行组合使用,既保证机