
一种机器人全向移动底盘结构.pdf

猫巷****志敏


1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
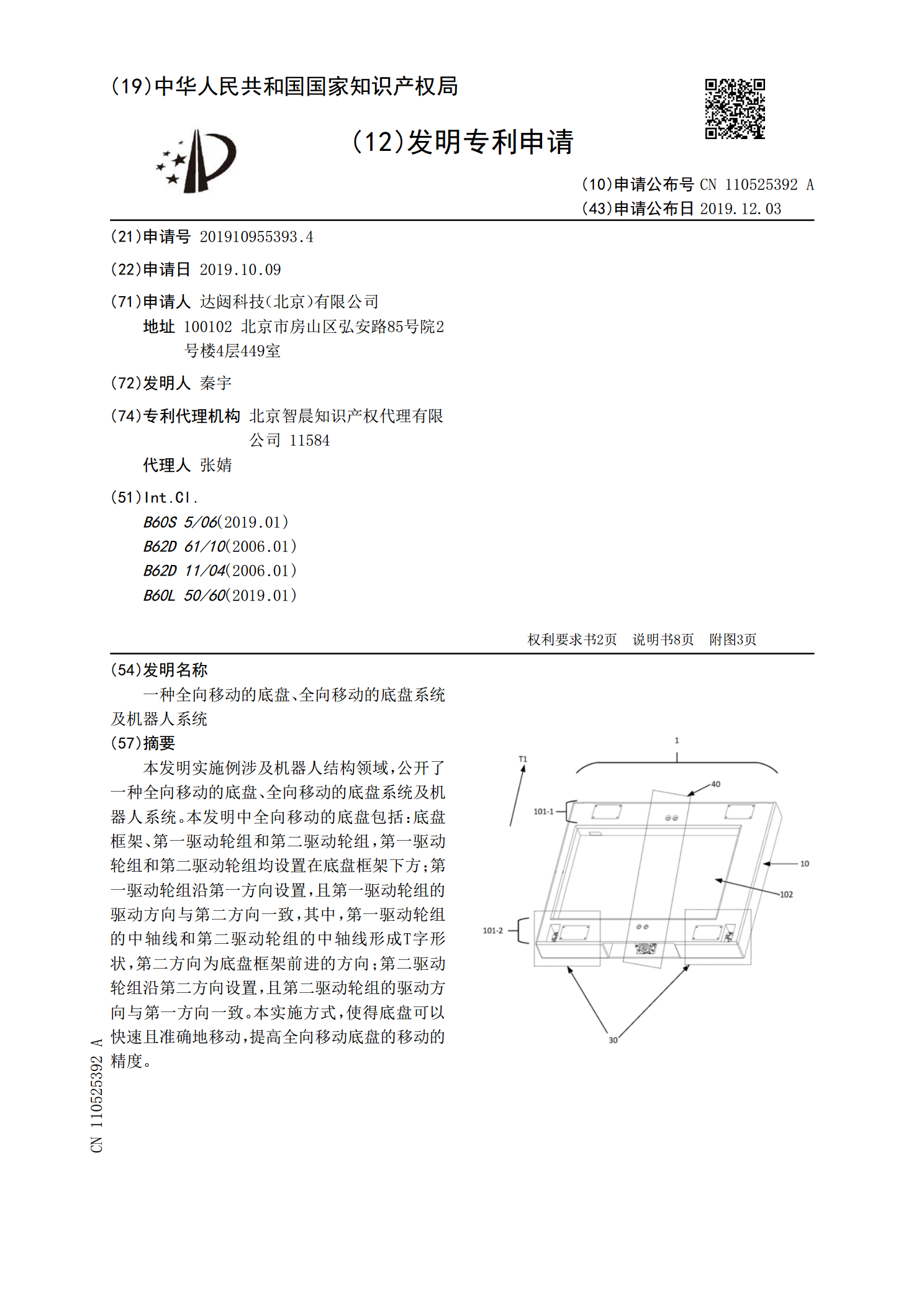
一种全向移动的底盘、全向移动的底盘系统及机器人系统.pdf
本发明实施例涉及机器人结构领域,公开了一种全向移动的底盘、全向移动的底盘系统及机器人系统。本发明中全向移动的底盘包括:底盘框架、第一驱动轮组和第二驱动轮组,第一驱动轮组和第二驱动轮组均设置在底盘框架下方;第一驱动轮组沿第一方向设置,且第一驱动轮组的驱动方向与第二方向一致,其中,第一驱动轮组的中轴线和第二驱动轮组的中轴线形成T字形状,第二方向为底盘框架前进的方向;第二驱动轮组沿第二方向设置,且第二驱动轮组的驱动方向与第一方向一致。本实施方式,使得底盘可以快速且准确地移动,提高全向移动底盘的移动的精度。
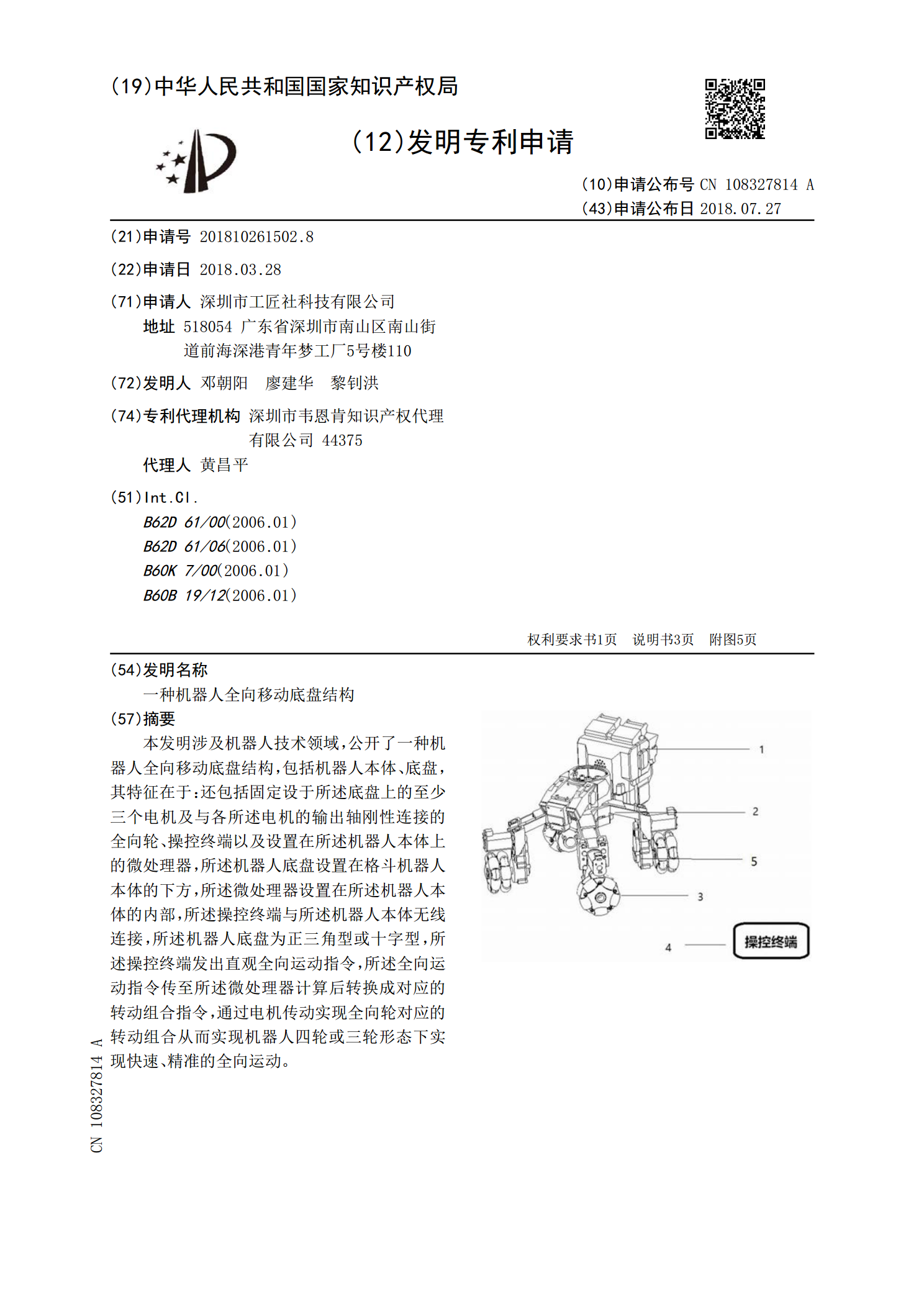
一种机器人全向移动底盘结构.pdf
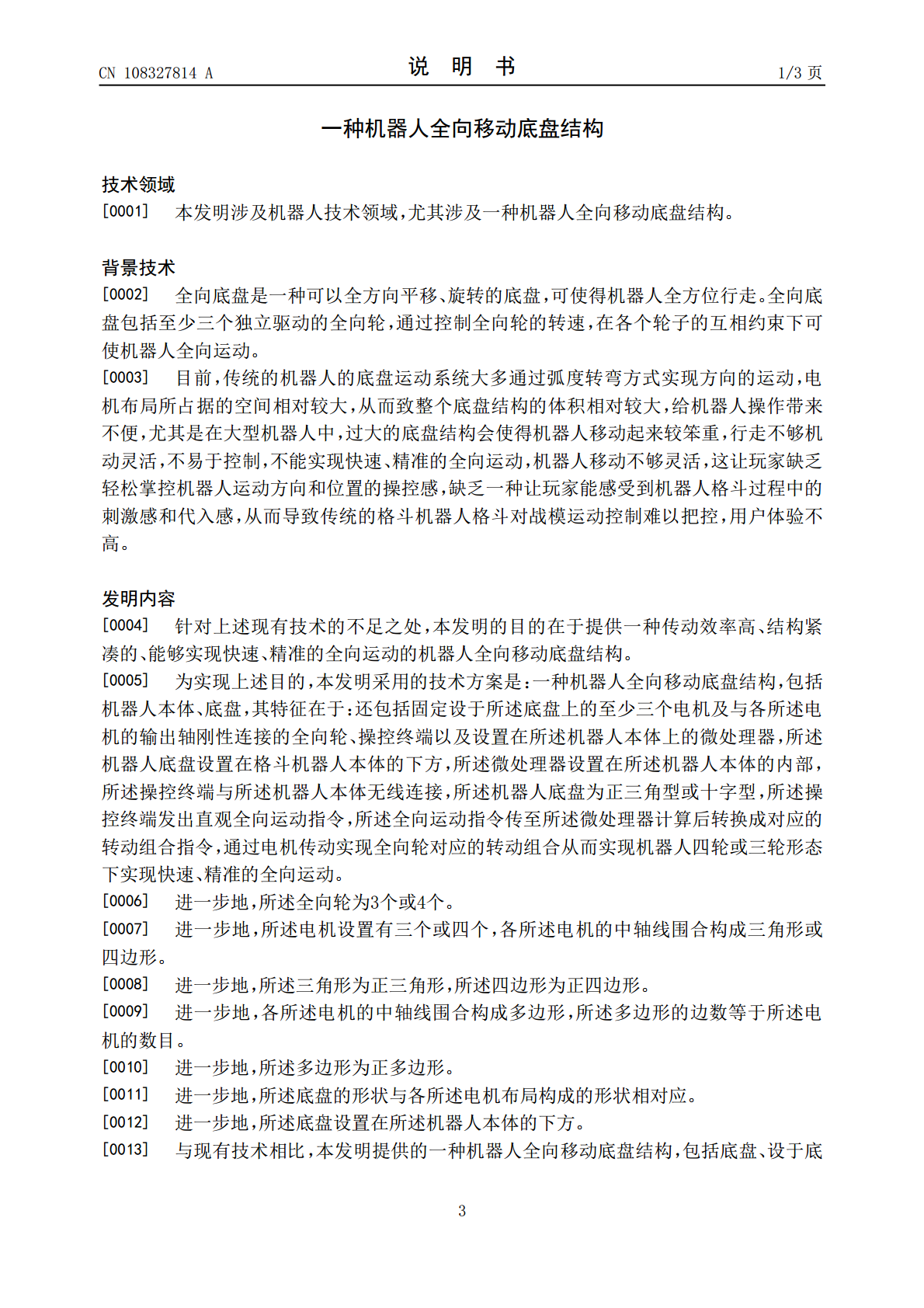
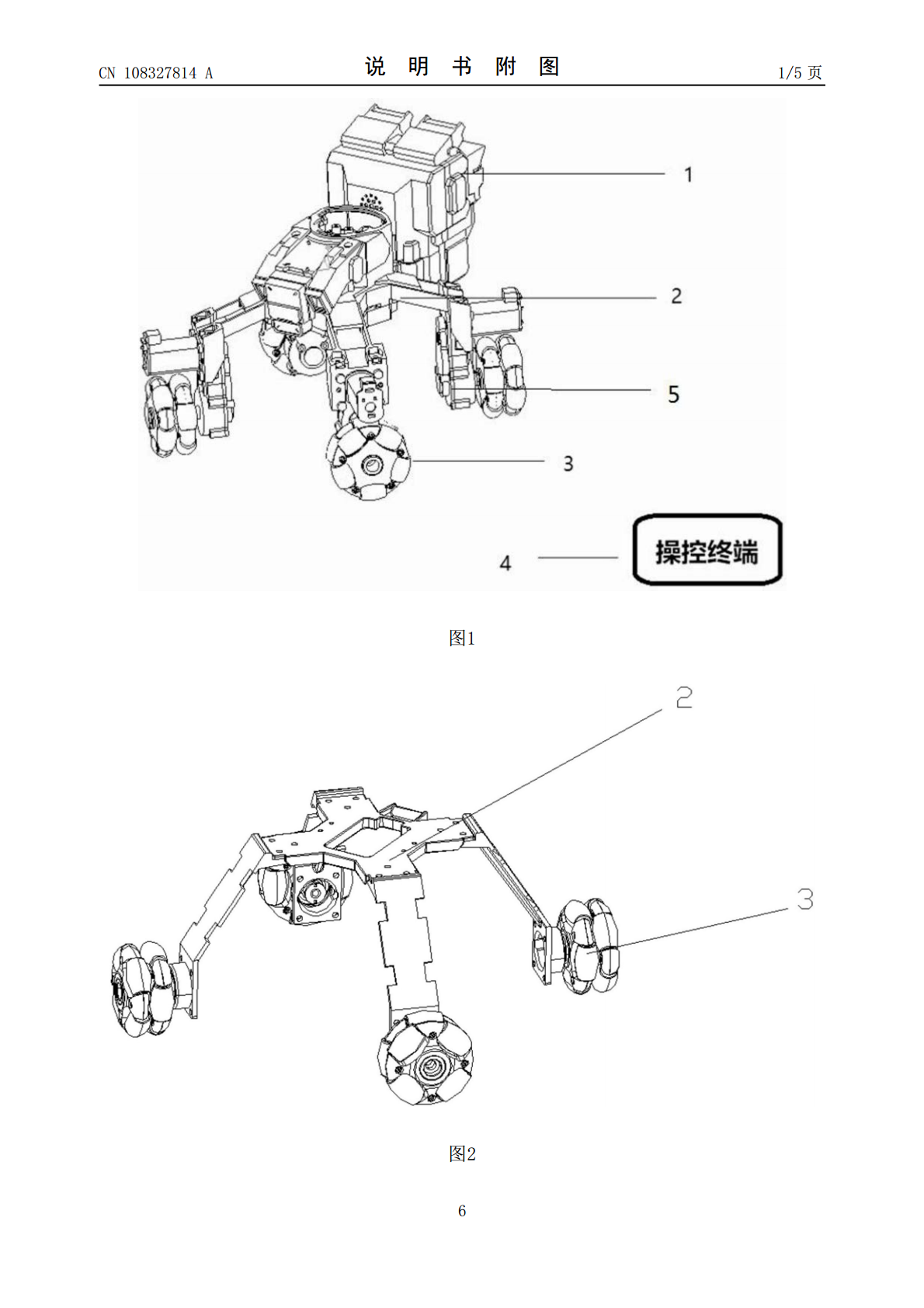
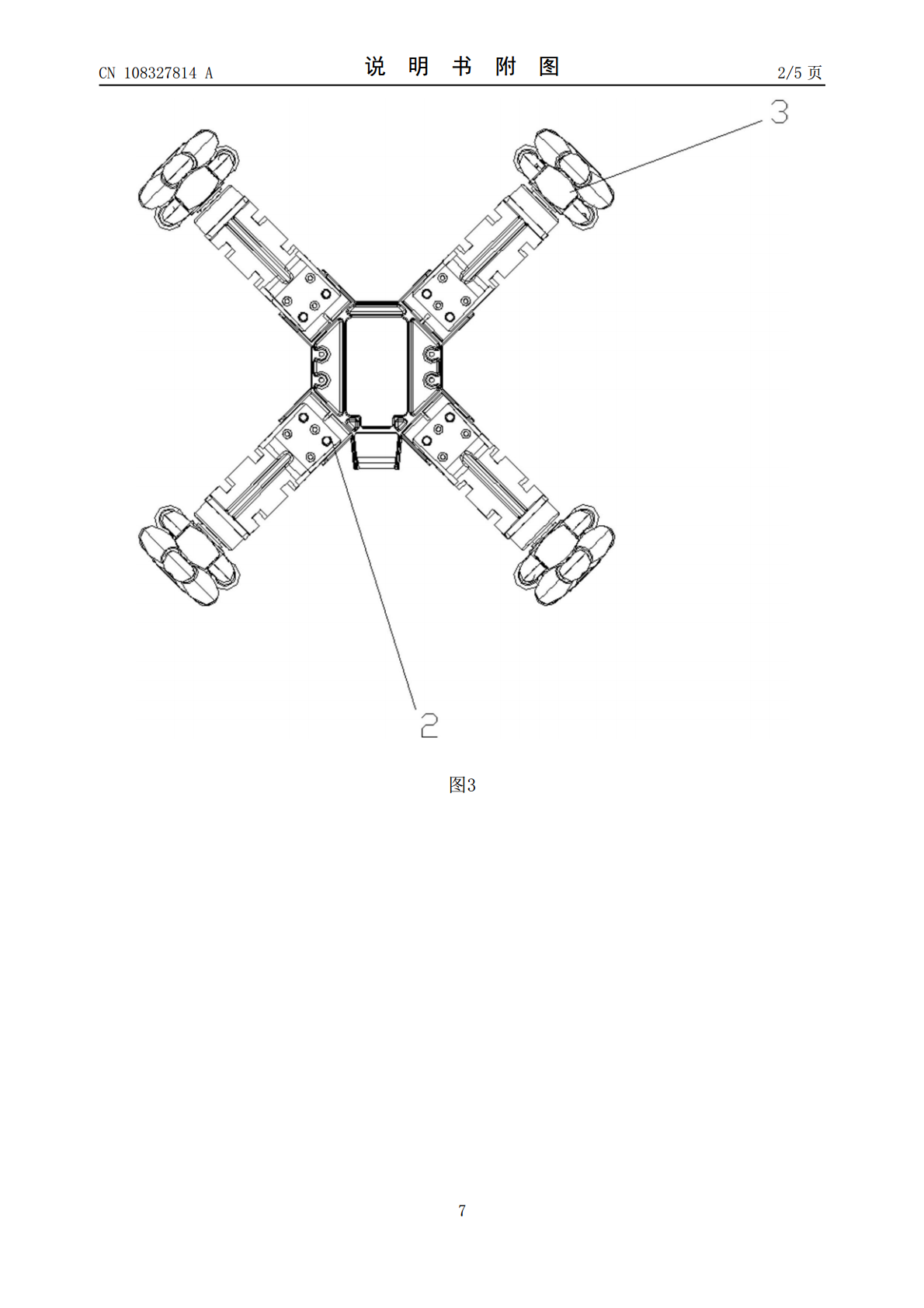
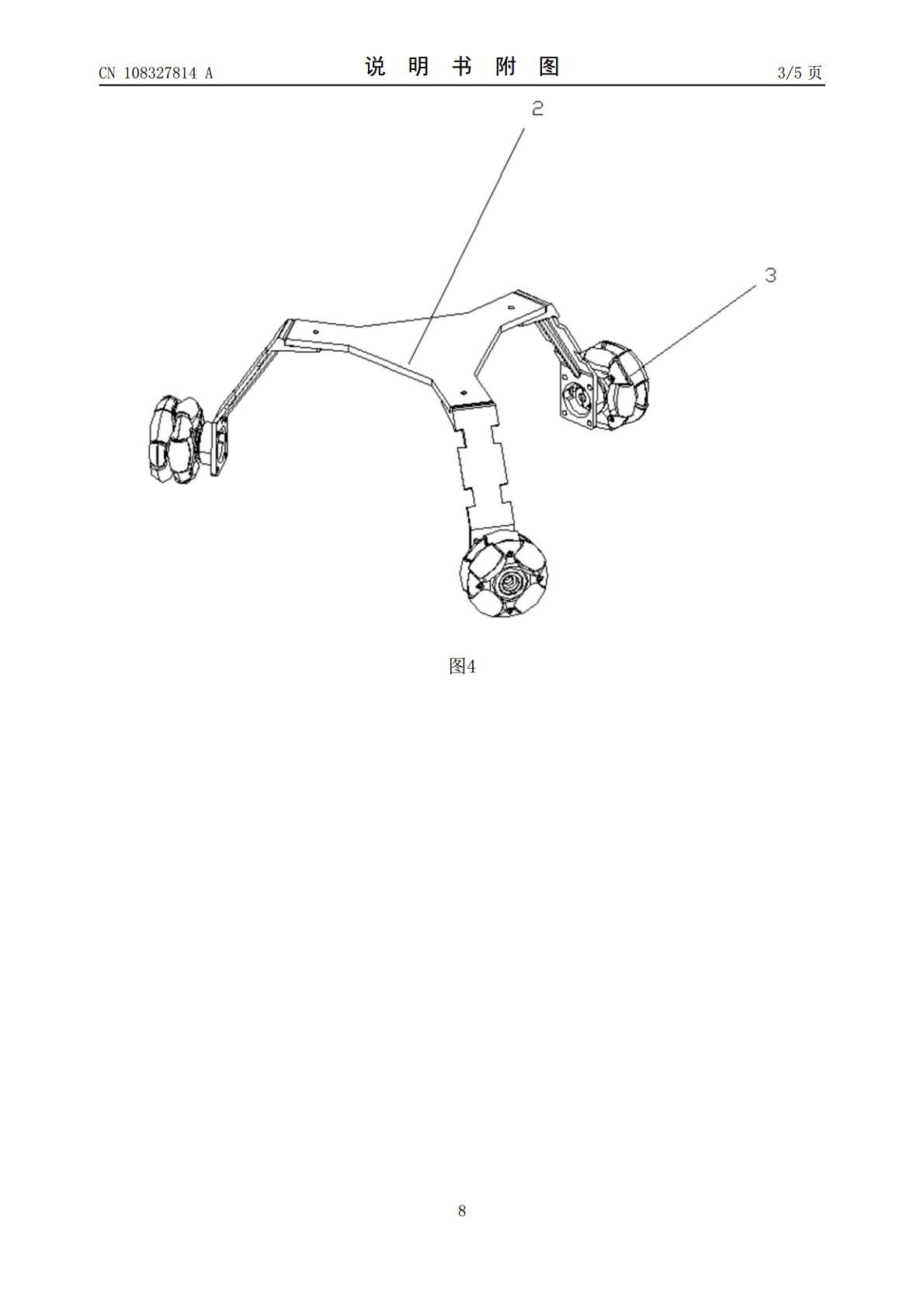
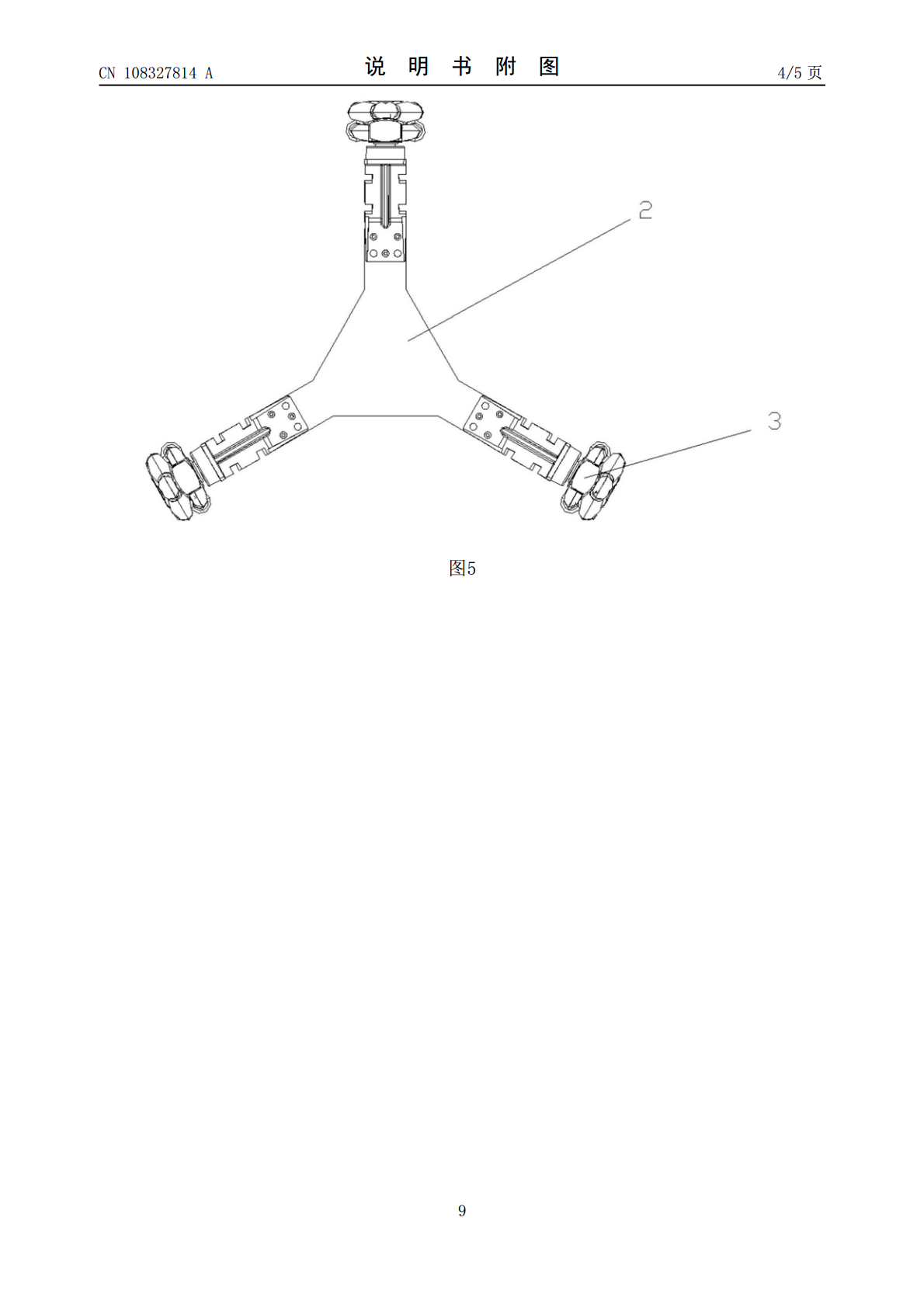
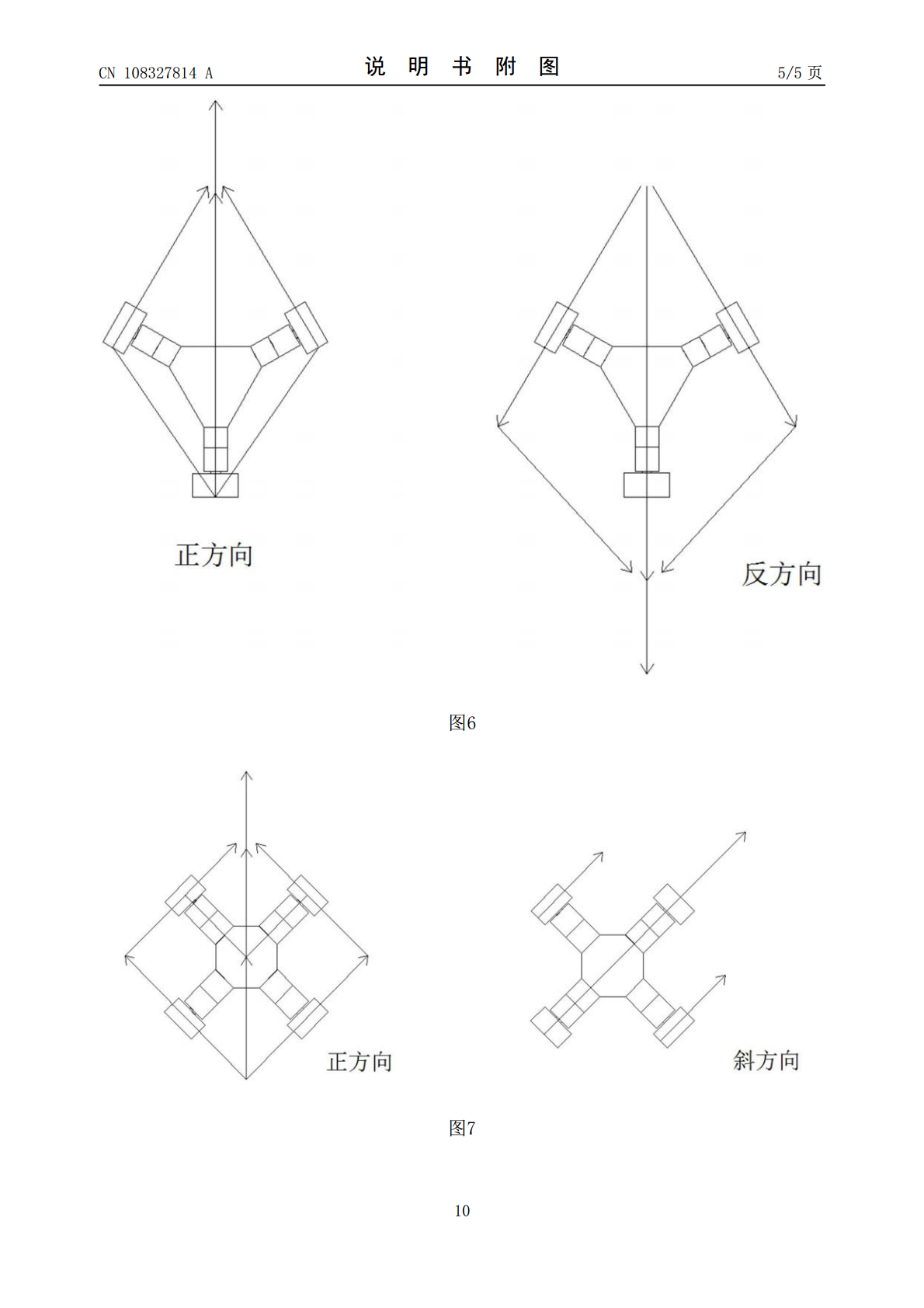
本发明涉及机器人技术领域,公开了一种机器人全向移动底盘结构,包括机器人本体、底盘,其特征在于:还包括固定设于所述底盘上的至少三个电机及与各所述电机的输出轴刚性连接的全向轮、操控终端以及设置在所述机器人本体上的微处理器,所述机器人底盘设置在格斗机器人本体的下方,所述微处理器设置在所述机器人本体的内部,所述操控终端与所述机器人本体无线连接,所述机器人底盘为正三角型或十字型,所述操控终端发出直观全向运动指令,所述全向运动指令传至所述微处理器计算后转换成对应的转动组合指令,通过电机传动实现全向轮对应的转动组合从而
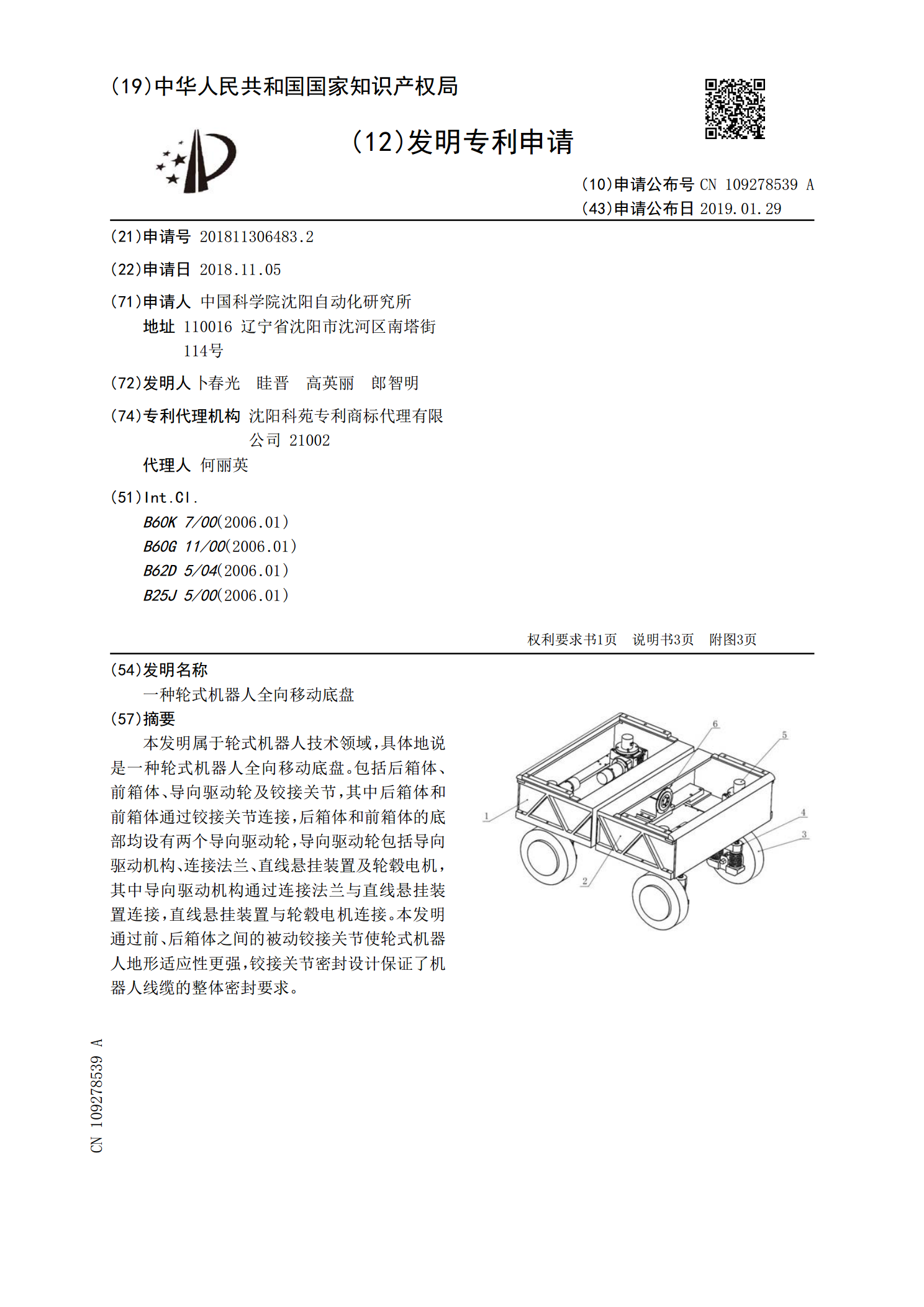
一种轮式机器人全向移动底盘.pdf
本发明属于轮式机器人技术领域,具体地说是一种轮式机器人全向移动底盘。包括后箱体、前箱体、导向驱动轮及铰接关节,其中后箱体和前箱体通过铰接关节连接,后箱体和前箱体的底部均设有两个导向驱动轮,导向驱动轮包括导向驱动机构、连接法兰、直线悬挂装置及轮毂电机,其中导向驱动机构通过连接法兰与直线悬挂装置连接,直线悬挂装置与轮毂电机连接。本发明通过前、后箱体之间的被动铰接关节使轮式机器人地形适应性更强,铰接关节密封设计保证了机器人线缆的整体密封要求。
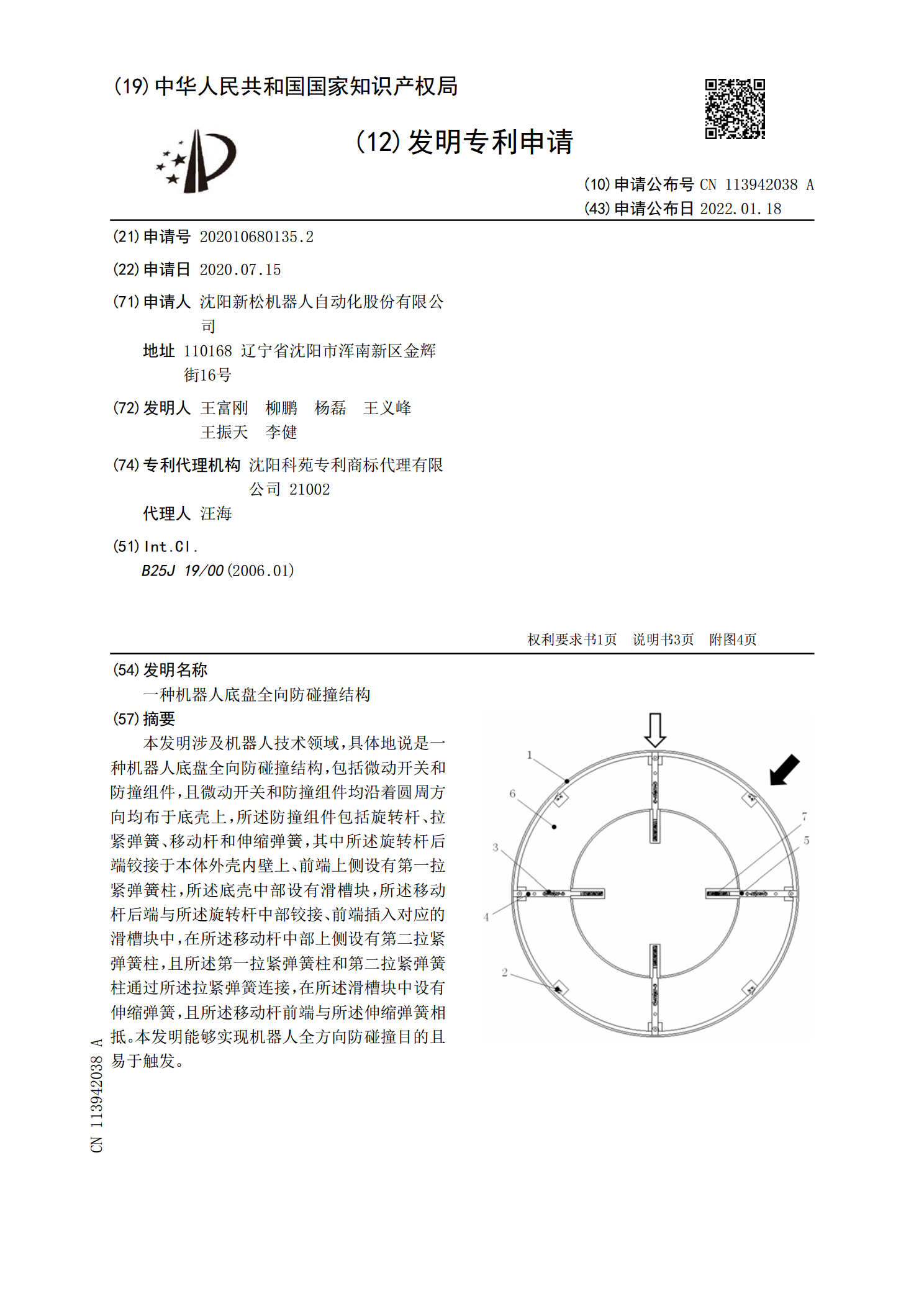
一种机器人底盘全向防碰撞结构.pdf
本发明涉及机器人技术领域,具体地说是一种机器人底盘全向防碰撞结构,包括微动开关和防撞组件,且微动开关和防撞组件均沿着圆周方向均布于底壳上,所述防撞组件包括旋转杆、拉紧弹簧、移动杆和伸缩弹簧,其中所述旋转杆后端铰接于本体外壳内壁上、前端上侧设有第一拉紧弹簧柱,所述底壳中部设有滑槽块,所述移动杆后端与所述旋转杆中部铰接、前端插入对应的滑槽块中,在所述移动杆中部上侧设有第二拉紧弹簧柱,且所述第一拉紧弹簧柱和第二拉紧弹簧柱通过所述拉紧弹簧连接,在所述滑槽块中设有伸缩弹簧,且所述移动杆前端与所述伸缩弹簧相抵。本发明

一种全向底盘和机器人.pdf
本申请涉及机械领域,具体而言,涉及一种全向底盘和机器人。一种全向底盘,全向底盘包括:基盘,至少两个驱动舵轮,驱动舵轮均安装于基盘;至少两个随动轮,随动轮均安装于基盘,且随动轮与驱动舵轮位于基盘的同一侧;随动轮为全向轮。全向底盘的主动轮为驱动舵轮,以全向轮作为从动轮,全向底盘在跨越障碍以及在不平整的路面行驶时,全向底盘在移动过程中不会产生偏移的问题;且越障过程中能够很大程度地改善路线精度差的问题。