
一种智能搬运小车系统及其控制方法.pdf

努力****亚捷

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种智能搬运小车系统及其控制方法.pdf
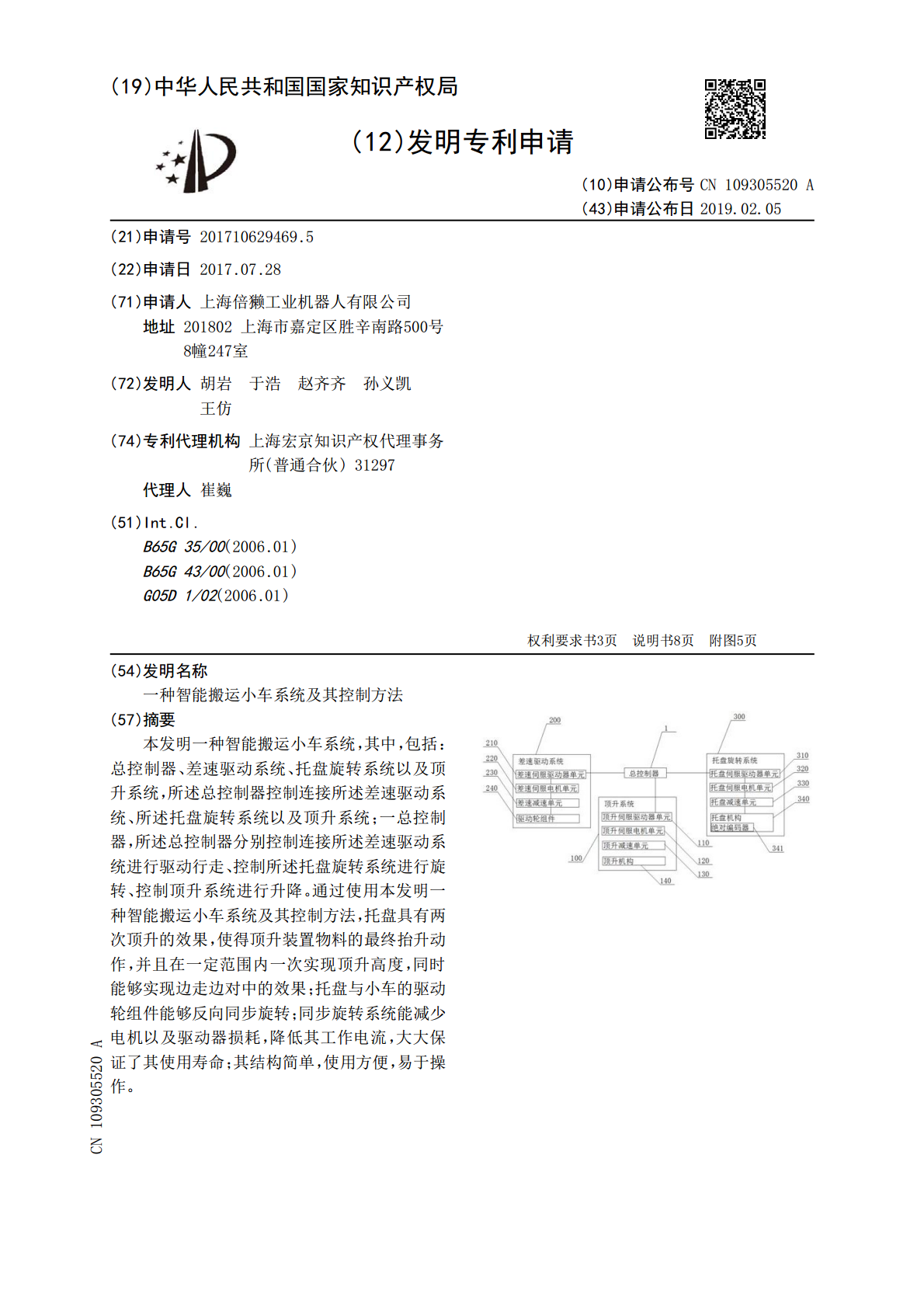
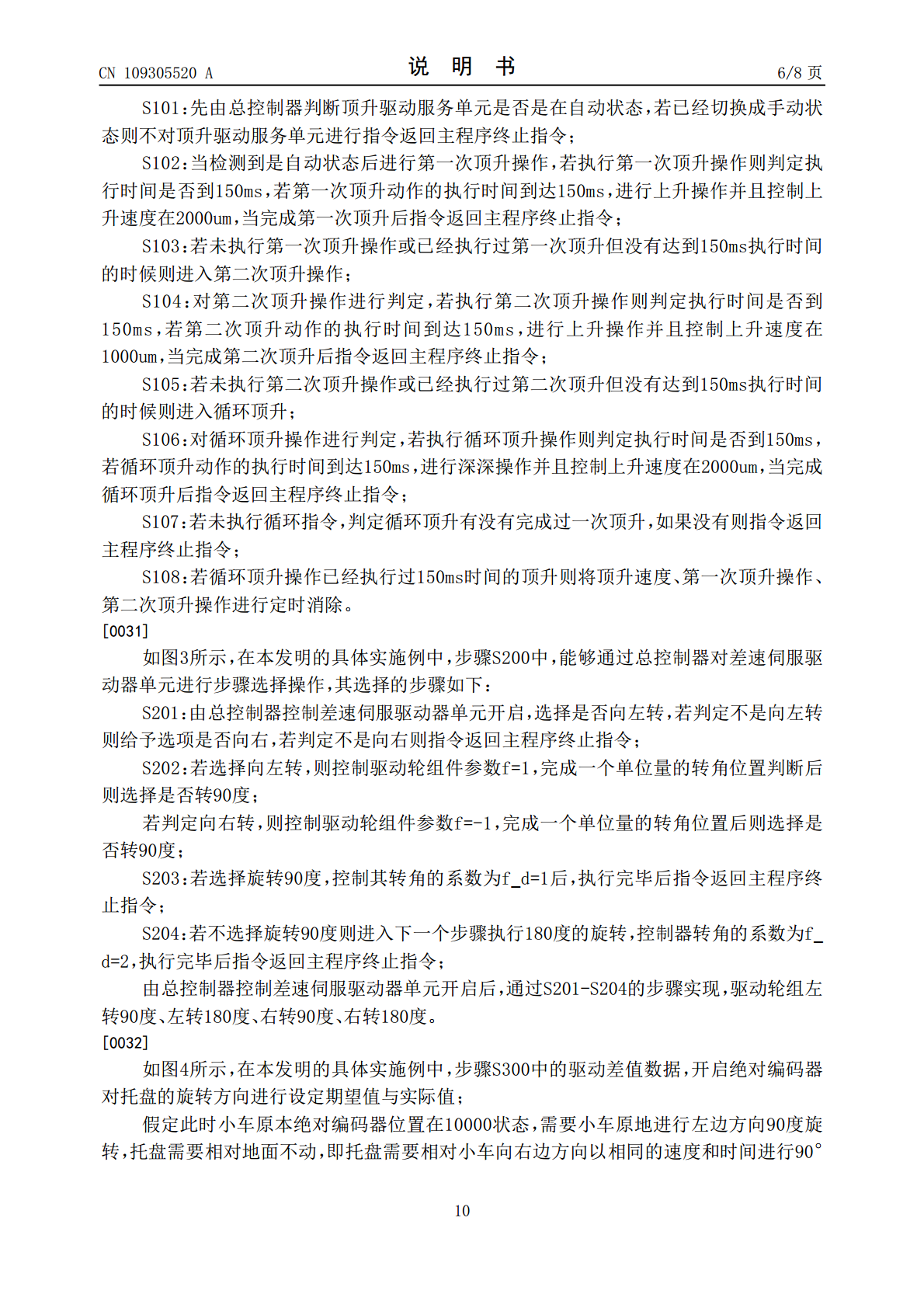
本发明一种智能搬运小车系统,其中,包括:总控制器、差速驱动系统、托盘旋转系统以及顶升系统,所述总控制器控制连接所述差速驱动系统、所述托盘旋转系统以及顶升系统;一总控制器,所述总控制器分别控制连接所述差速驱动系统进行驱动行走、控制所述托盘旋转系统进行旋转、控制顶升系统进行升降。通过使用本发明一种智能搬运小车系统及其控制方法,托盘具有两次顶升的效果,使得顶升装置物料的最终抬升动作,并且在一定范围内一次实现顶升高度,同时能够实现边走边对中的效果;托盘与小车的驱动轮组件能够反向同步旋转;同步旋转系统能减少电机以及

智能无人装车系统的智能小车及其位移控制方法.pdf
本发明涉及智能无人装车系统的智能小车及其位移控制方法,应用于垛装产品智能无人装车系统,所述智能小车底部设置有舵轮、辅助万向轮、第一从动轮组和第二从动轮组,所述智能小车底部左右两端分别设置有第三测距传感器和第四测距传感器,所述舵轮驱动模块可以将舵轮的中心转轴在水平面内进行旋转从而改变舵轮的前进方向,通过行进过程中监测第三测距传感器和第四测距传感器的测距值差异,判断是否发生倾斜,避免发生倾翻。
一种搬运小车、车辆搬运器及其充电系统.pdf
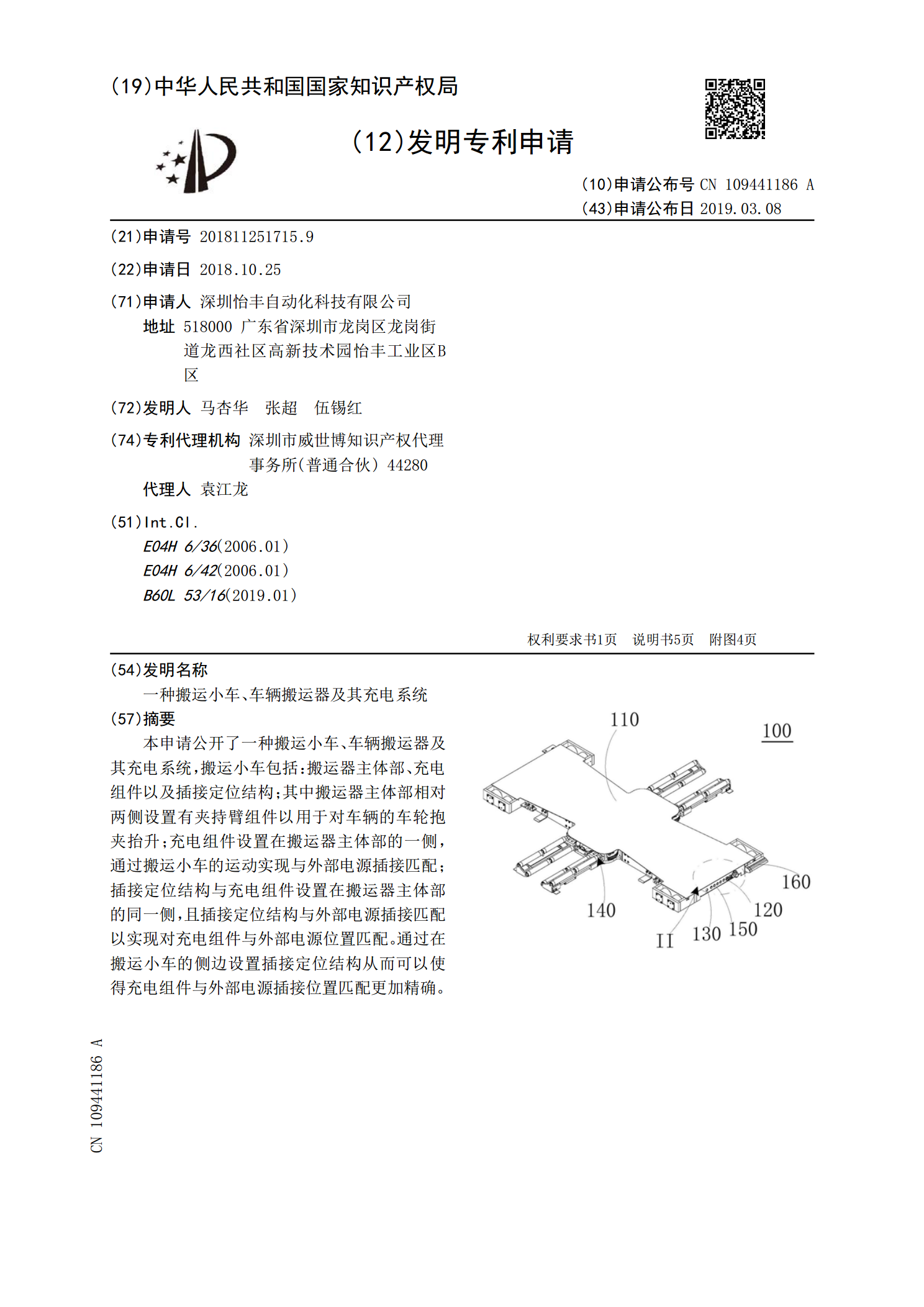
本申请公开了一种搬运小车、车辆搬运器及其充电系统,搬运小车包括:搬运器主体部、充电组件以及插接定位结构;其中搬运器主体部相对两侧设置有夹持臂组件以用于对车辆的车轮抱夹抬升;充电组件设置在搬运器主体部的一侧,通过搬运小车的运动实现与外部电源插接匹配;插接定位结构与充电组件设置在搬运器主体部的同一侧,且插接定位结构与外部电源插接匹配以实现对充电组件与外部电源位置匹配。通过在搬运小车的侧边设置插接定位结构从而可以使得充电组件与外部电源插接位置匹配更加精确。
一种AGV智能小车及其控制方法.pdf
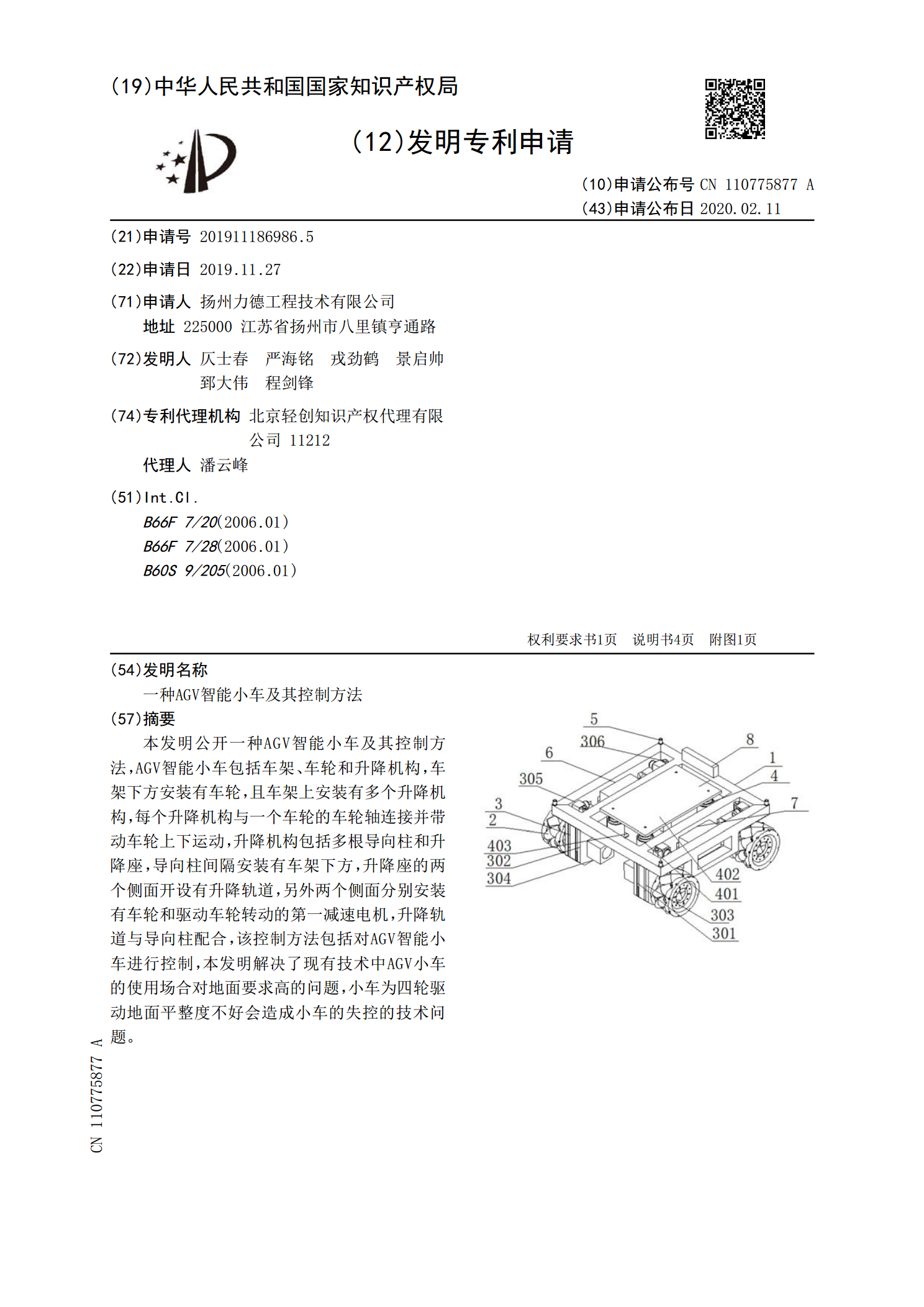
本发明公开一种AGV智能小车及其控制方法,AGV智能小车包括车架、车轮和升降机构,车架下方安装有车轮,且车架上安装有多个升降机构,每个升降机构与一个车轮的车轮轴连接并带动车轮上下运动,升降机构包括多根导向柱和升降座,导向柱间隔安装有车架下方,升降座的两个侧面开设有升降轨道,另外两个侧面分别安装有车轮和驱动车轮转动的第一减速电机,升降轨道与导向柱配合,该控制方法包括对AGV智能小车进行控制,本发明解决了现有技术中AGV小车的使用场合对地面要求高的问题,小车为四轮驱动地面平整度不好会造成小车的失控的技术问题。
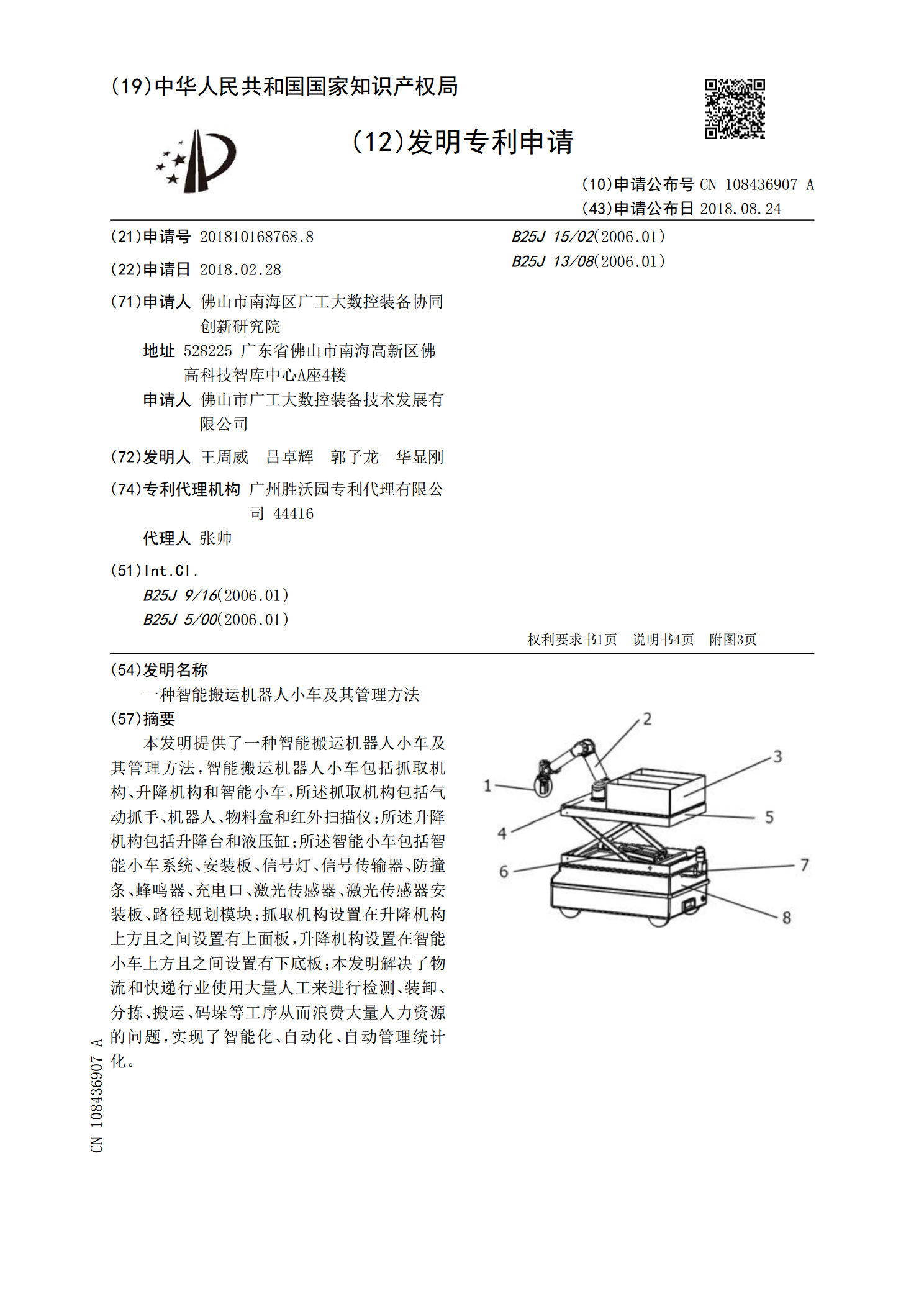
一种智能搬运机器人小车及其管理方法.pdf
本发明提供了一种智能搬运机器人小车及其管理方法,智能搬运机器人小车包括抓取机构、升降机构和智能小车,所述抓取机构包括气动抓手、机器人、物料盒和红外扫描仪;所述升降机构包括升降台和液压缸;所述智能小车包括智能小车系统、安装板、信号灯、信号传输器、防撞条、蜂鸣器、充电口、激光传感器、激光传感器安装板、路径规划模块;抓取机构设置在升降机构上方且之间设置有上面板,升降机构设置在智能小车上方且之间设置有下底板;本发明解决了物流和快递行业使用大量人工来进行检测、装卸、分拣、搬运、码垛等工序从而浪费大量人力资源的问题,